Складний рух
Складни́й рух матеріальної точки або тіла — такий рух матеріального об'єкту, при якому він одночасно рухається відносно якоїсь системи відліку, а та, у свою чергу, рухається відносно іншої системи відліку. При цьому розглядається питання про взаємозв'язок параметрів рухів матеріальної точки або тіла у цих двох системах відліку.
Геометричний бік задачі

Зазвичай обирають одну із систем відліку за базову («абсолютну», «лабораторну», «нерухому», «систему відліку нерухомого спостерігача», «першу», «нештриховану» тощо), іншу називають «рухомою» («системою відліку рухомого спостерігача», «штрихованою», «другою») та вводять таку термінологію:
- абсолютний рух — це рух матеріальної точки/тіла у базовій системі відліку. У цій системі відліку радіус-вектор точки будемо позначати , а її швидкість — ;
- відносний рух — це рух матеріальної точки/тіла відносно рухомої системи відліку. У цій системі відліку радіус-вектор точки — , швидкість точки — ;
- переносний рух — це рух рухомої системи відліку та усіх постійно зв'язаних з нею точок простору[2] відносно базової системи відліку. Переносний рух матеріальної точки — це рух тієї точки рухомої системи відліку, у якій в даний момент часу знаходиться ця матеріальная точка. Радіус-вектор початку системи координат рухомої системи відліку — , його швидкість — , кутова швидкість обертання рухомої системи відліку відносно базової — . Якщо ця кутова швидкість дорівнює нулю, то мова йтиме про поступальний рух рухомої системи відліку.







Переносна швидкість — це швидкість у базовій системі відліку довільної точки, зафіксованої відносно рухомої системи відліку, обумовлена рухом цієї рухомої системи відліку відносно базової. Наприклад, це швидкість тієї точки рухомої системи відліку, у якій в даний момент часу перебуває матеріальна точка. Переносна швидкість дорівнює лише у тих випадках, коли рухома система відліку рухається поступально.


Вводяться також поняття відповідних прискорень , , , та .





Вибір абсолютної та відносної системи відліку є умовним. Він залежить від постановки задачі і підпорядкований основній меті — максимальному спрощенню її розв'язання.
З точки зору лише чистої кінематики (тобто, задачі перерахування кінематичних величин — координат, швидкостей, прискорень — від однієї системи відліку до іншої) не має значення, чи є якась із систем відліку інерційною чи ні; це ніяк не позначається на формулах перетворення кінематичних величин при переході від однієї системи відліку до іншої (тобто ці формули можна застосовувати і для переходу від однієї довільної обертової неінерційної системи відліку до іншої).
Однак для динаміки інерційні системи відліку мають особливе значення: у них механічні явища описуються найпростішим способом і, відповідно, рівняння динаміки формулюються початково саме для інерційних систем відліку[3]. Тому особливо важливими є випадки переходу від інерційної системи відліку до іншої інерційної, а також від інерційної до неінерційної і назад.
У подальшому викладі за замовчуванням базова система відліку вважається інерційною, а на рухому жодних обмежень не накладається.
Класична механіка
Класична механіка спирається на уявленнях про евклідів простір та принцип відносності Галілея, що дозволяє використовувати перетворення Галілея.
Кінематика складного руху точки
Вгорі (в інерційній системі): діряве відро з фарбою рухають на колосниках по прямій над театральною сценою, що обертається. Траєкторія є прямою лінією.
Внизу (в неінерціальній системі): те ж саме, але з точки зору спостерігача, який стоїть на обертовій сцені. Траєкторія має форму кривої, та відповідає сліду від фарби на сцені
Кінематика руху, що базується на аналізі траєкторії рухомого тіла, у загальному випадку не дає повної інформації для класифікації цих рухів. Так, рух по прямій в неінерційній системі відліку може бути криволінійним (і, отже, обумовленим діючими на тіло силами) в інерціальній системі відліку. І, навпаки, прямолінійний рух в інерційній системі відліку може бути криволінійним в неінерційній, і, отже, провокувати уявлення про нібито дію на тіло сил.
Шлях
Абсолютний рух та його шлях представляються зміною радіуса-вектора , що розглядається як сума векторів переносного і відносного рухів:


Швидкість
Основні задачі кінематики складного руху полягають у встановленні залежностей між кінематичними характеристиками абсолютного і відносного рухів точки (або тіла) і характеристиками руху рухомої системи відліку, тобто переносного руху. Взаємозв'язок швидкостей визначається диференціюванням взаємозв'язку для положень. Для точки ці залежності формулюються так: абсолютна швидкість точки дорівнює геометричній сумі відносної і переносної швидкостей, тобто:

Ця рівність розкриває зміст теореми про додавання швидкостей[4].
Слід відзначити, що разом з наведеною рівністю завжди справедливим є і рівняння

Однак у загальному випадку в цьому рівнянні не є переносною швидкістю, а не є відносною швидкістю. Такими вони стають лише тоді, коли рухома система відліку рухається поступально, тобто без обертання[5].


Прискорення
Залежність прискорень можна отримати шляхом диференціювання залежностей для швидкостей, враховуючи, що відносне переміщення також може залежати від часу.
Абсолютне прискорення буде дорівнювати сумі:

Тут:
- сума перших трьох членів називається переносним прискоренням у якій:

- перший доданок — переносне поступальне прискорення другої системи відносно першої,
- другий доданок — переносне обертальне прискорення другої системи, що виникає через нерівномірність її обертання,
- третій доданок є вектором, спрямованим протилежно доцентровій складовій вектора , перпендикулярній до (що можна отримати, розглядаючи цей подвійний векторний добуток — він дорівнює ) й тому є доцентровим прискоренням. Воно збігається з нормальним переносним прискоренням тієї точки обертової системи, з якою у даний момент збігається рухома точка (не слід плутати з нормальним прискоренням рухомої точки, спрямованим по нормалі до її траєкторії);



- четвертий член є прискоренням Коріоліса, що з'являється в результаті взаємного впливу переносного обертового руху другої системи відліку і відносного поступального руху точки відносно неї;
- останній член — прискорення точки відносно рухомої системи відліку.

Кінематика складного руху тіла

Згідно з першим законом Ньютона, усі види рухів при їх розгляді в інерційній системі координат можуть бути віднесені до однієї з двох категорій. А саме — до категорії прямолінійних і рівномірних (тобто тих що мають постійну швидкість) рухів, можливих виключно за відсутності неврівноважених сил, що діють на тіло.
До іншої категорії належить решта видів рухів.
Для твердого тіла, коли всі складові (тобто відносні та переносні) руху є поступальними, абсолютний рух також є поступальним зі швидкістю, що дорівнює геометричній сумі швидкостей складових рухів. Якщо складові руху тіла є обертальними навколо осей, що перетинаються в одній точці (як, наприклад, у гіроскопа), то результуючий рух також є обертальним навколо цієї точки з миттєвою кутовою швидкістю, рівною геометричній сумі кутових швидкостей складових рухів. У загальному випадку рух буде складатися з серії миттєвих гвинтових рухів.
Розрахувати взаємозв'язок швидкостей різних точок твердого тіла у різних системах відліку можна за допомогою комбінування формули додавання швидкостей і формули Ейлера для зв'язку швидкостей точок твердого тіла]]. Взаємозв'язок прискорень знаходиться простим диференціюванням отриманої векторної рівності по часу.
Динаміка складного руху точки
Концепція Ньютона щодо пропорційності набутого тілом прискорення під дією сили до цієї сили в інерційних системах відліку виконується завжди. Під силою при цьому розуміється міра механічного впливу на дане матеріальне тіло інших тіл[6], яка обов'язково є результатом взаємодії тіл[7].
Однак при розгляді рухів у неінерційній системі відліку, поряд із силами, походження яких можна простежити, як результат взаємодії з іншими тілами та полями, вводяться до розгляду і фізичні величини іншої природи — сили інерції. Їх введення і використання дозволяє надати рівняння руху тіл в неінерційних системах відліку форми, що збігається з формою рівняння другого закону Ньютона в інерційних системах відліку.
Для того, щоб розрізнити сили двох згаданих видів, термін «сили інерції» часто супроводжують додатковим визначенням, таким, як, наприклад фіктивні[8] або уявні[9].
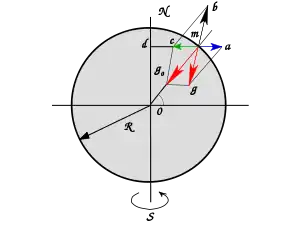
Залучення уявлень про сили інерції для опису руху тіл в неінерційних системах відліку може бути корисним і ефективним. Наприклад, дією сили інерції у системі відліку, пов'язаній із обертанням Землі навколо своєї осі, може бути пояснений ефект уповільнення ходу маятникових годинників, що спостерігається по мірі їх наближення до екватора. Інший приклад — дія сили Коріоліса на воду в річках, що течуть у меридіональному напрямку. Наслідком такої дії є неоднаковість розмиву правих і лівих (у напрямку течії) берегів річок. Ще значимішою є дія сили Коріоліса на морські течії і повітряні потоки в атмосфері[8].
Релятивістська механіка
Теорія відносності спирається на неевклідів простір Мінковського та принцип відносності Ейнштейна, що обумовлює використання перетворення Лоренца. При швидкостях, суттєво менших від швидкості світла, релятивістська механіка може бути зведена до класичної.
Швидкість
При швидкостях, близьких до швидкості світла, перетворення Галілея не є точно інваріантними і класична формула додавання швидкостей перестає виконуватися. Замість цього, інваріантними є перетворення Лоренца, а зв'язок швидкостей у двох інерційних системах відліку має вигляд:

при допущенні, що швидкість спрямована уздовж осі х системи S. Легко переконатись, що у границі нерелятивістських швидкостей перетворення Лоренца зводяться до перетворень Галілея.

Однак уводиться величина — бистрота, що є адитивною при переході від однієї системи відліку до іншої.
Неінерційні системи відліку
Зв'язок швидкостей і прискорень у системах відліку, що рухаються одна відносно іншої прискорено, є значно складнішою і визначається локальними властивостями простору у точках, що розглядаються (залежить від похідної тензора Рімана).
Примітки
- Бронштейн И. Н., Семендяев К. А. Справочник по математике. М.: Издательство «Наука». Редакция справочной физико-математической литературы, 1964. — 608 с. с ил., — С.216.
- Тобто точок, нерухомих відносно рухомої системи.
- Ландау Л. Д., Лифшиц Е. М. Механика. — М. : Наука, 1988. — Т. «Теоретическая физика», том I. — С. 13-15. — ISBN 5-02-013850-9.
- Тарг С. М. Краткий курс теоретической механики: Учеб. для втузов. — 10-е изд., перераб. и доп. — Высшая школа, 1986. — 416 с.
- Голубев Ю. Ф. Основы теоретической механики. — М. : МГУ, 2000. — С. 119. — ISBN 5-211-04244-1.
- Тарг С. М. Сила // Фізична енциклопедія / Гл. ред. А. М. Прохоров. — М. : Большая Российская энциклопедия, 1994. — Т. 4. том=4. Пойнтинга—Робертсона эффект — Стримеры. — С. 494. — 40 000 прим. — ISBN 5-85270-087-8.
- Kleppner D., Kolenkow R. J. An Introduction to Mechanics. — McGraw-Hill, 1973. — С. 59-60. — ISBN 0-07-035048-5.
- Зоммерфельд А. Механика. — Ижевск : НИЦ «Регулярная и хаотическая динамика», 2001. — 368 с. — ISBN 5-93972-051-X.
- Борн М. Эйнштейновская теория относительности. — М. : Мир, 1972. — С. 81.
Джерела
- Яворський Б. М., Детлаф А. А., Лебедев А. К. Довідник з фізики для інженерів та студентів вищих навчальних закладів / Переклад з 8-го переробл. і випр. вид. — Т. : Навчальна книга — Богдан, 2007. — 1040 с. — ISBN 966-692-818-3.
- Гернет М. М. Курс теоретической механики. М.: Высшая школа. — 1973. — 464 с.
- Тарг С. М. Относительное движение // Физическая энциклопедия / Прохоров А. М. (гл. ред.). — М. : Большая Российская энциклопедия, 1992. — Т. 3. — С. 493. — ISBN 5-85270-019-3.
- Тарг С. М. Относительное движение // Физический энциклопедический словарь / Введенский Б. А. (гл. ред.). — М. : Советская энциклопедия, 1963. — Т. 3. — С. 553.