Перетворення Лоренца
Перетворення Лоренца — лінійні перетворення координат простору Мінковського, що залишають незмінним просторово-часовий інтервал. Перетворення Лоренца пов'язують координати подій в різних інерційних системах відліку та мають фундаментальне значення в фізиці. Інваріантність фізичної теорії відносно перетворень Лоренца, або загальна коваріантність, є необхідною умовою достовірності цієї теорії.

Формулювання
Найбільш розповсюджена форма запису перетворень Лоренца зв'язує координати події в інерційній системі відліку K з координатами тієї ж події в системі K′, яка рухається відносно K зі швидкістю V вздовж осі x:
- ,

- де x, y, z, t — координати події в системі K; x′, y′, z′, t′ — координати тієї ж події в системі K′; V — відносна швидкість двох систем; c — швидкість світла.
Зворотні формули (перехід від системи K′ до K) можна отримати заміною V → -V:
- .

Властивості перетворень Лоренца
З формул перетворень легко побачити, що при граничному переході до класичної механіки або — що те ж саме — при швидкостях значно менших швидкості світла формули перетворення Лоренца переходять в перетворення Галілея за принципом відповідності.

При V > c координати x, t стають уявними, що означає той факт, що рух зі швидкістю, більшою за швидкість світла в вакуумі, неможливий. Неможливо навіть використовувати систему відліку, яка б рухалась зі швидкістю світла, бо тоді знаменники у формулах дорівнювали б нулю.
На відміну від перетворень Галілея, перетворення Лоренца некомутативні: результат двох послідовних перетворень Лоренца залежить від їхнього порядку. Це можна побачити з формального тлумачення перетворень Лоренца як обертань чотиривимірної системи координат, де, як відомо, результат двох обертань навколо різних осей залежить від порядку їх виконання. Винятком з цього правила є лише перетворення з паралельними векторами швидкостей V1||V2, які еквівалентні поворотам системи координат відносно однієї осі.
Історична довідка
Поштовхом до відкриття перетворень Лоренца послужив нульовий результат інтерференційного експерименту Майкельсона — Морлі. Для усунення виявлених труднощів теорії ефіру Лоренц припустив, що всі тіла при поступальному русі змінюють свої розміри, а саме, що зменшення розмірів тіла в напрямку руху визначається множником , де — зменшення розмірів в напрямку, перпендикулярному руху тіла. Необхідно було органічно ввести це зменшення розмірів у теорію.


Формули, що відомі зараз як перетворення Лоренца, першим вивів Джозеф Лармор в 1900 році, таким чином він врахував зміну масштабу часу при русі. 1904 року Лоренц довів інваріантність рівнянь Максвелла відносно таких перетворень, але в них ще входив невизначений множник та різні інерційні системи не розглядалися повністю рівноправними.
В 1905 Анрі Пуанкаре виправив прогалини в праці Лоренца та досяг повної коваріантності електродинаміки. Принцип відносності був визначений ним як загальне та строге положення. Саме в працях Пуанкаре вперше трапляються назви перетворення Лоренца та група Лоренца.
Виведення
В рамках основного виведення використовуються чотири аксіоми.
Одновимірні покомпонентні перетворення Лоренца для просторової та часової компонент
Нехай функції перетворень між результатами спостерігання деякої події у різних ІСВ із відносною швидкістю для одновимірного випадку задаються як


.

Враховуючи те, що простір-час однорідний [1] (якісно - кожна точка пустого простору-часу нічим не відрізняється від інших точок), можна стверджувати, що всі геометричні співвідношення між геометричними об'єктами не змінюються в залежності від вибору точки початку координат ІСВ. Це означає, що функції будуть лінійними функціями своїх аргументів, причому коефіцієнти при аргументах будуть залежати лише від відносної швидкості ІСВ:

.

Нехай є бескінечно мале зміщення у системі . Відповідне зміщення системи буде рівне , а проміжок часу, що відповідає зміщенню - .





Тоді для функції координати (для функції часу - аналогічно)
.

Оскільки простір-час однорідний, то зміщення не повинно залежати від точки простору-часу, а отже, є однаковими для всіх точок простору та усіх моментів часу , а отже, є постійними при заданій відносній швидкості. Отже, їх можна у записі функції представити у вигляді коефіцієнтів, які можуть залежати лише від відносної швидкості (оскільки функція залежить лише від координати, часу та відносної швидкості ІСВ):





,

де
.

Нехай, знову ж таки,
,

де - похідні від функцій по аргументу k. Тоді швидкість деякого цільового тіла в ІСВ А', відносно якої кінематичні характеристики відповідають значенням , рівна


.

Якщо вважати, що швидкість постійна (це можна зробити, оскільки функції не залежать від неї), та використати ідею однорідності простору-часу, то швидкість як функція від не залежить від . Тоді, беручи частинні похідні по від виразу для швидкості, можна отримати:




.

Далі, знову ж таки, можна використати ідею довільності швидкості без зменшення загальності отриманих виразів і занулити її. Звідси

,

,

.

Аналогічно, для похідної виразу по часу, можна записати:


,

,

.

Якщо відняти від , а від - , можна отримати:



,

.

Домноживши на , а - на , і після цього віднявши ці вирази, і аналогічно - з домноженням на і - на , можна отримати, що





,

.

Вирази у дужках відповідають якобіанам, які не можуть бути рівними нулю. Звідси . Використовуючи ці рівності і вирази , можна отримати умови рівності нулю всіх інших частинних похідних другого порядку. Звідси слідує, що перетворення-функції повинні бути лінійними.



При нульовому значенні виконується наступна умова:

,

тобто, при початку відліку часу початки координат ІСВ збігаються. Це означає рівність нулю констант у , причому загальність перетворень зменшена не буде (через однорідність простору-часу):

.

Тоді система буде рухатися відносно точки зі зміною координати у , а точка буде рухатися відносно системи зі зміною координати у . Якщо підставити дані значення у , можна знайти величини :







,

.

З можна дійти висновку, що . Можна ввести функції відносних швидкостей:


.

Тоді прийме вигляд:
.

Для визначення виду функцій треба ввести додаткову аксіоматику.
Нехай інерціальні системи відліку рівноправні [2]. Це означає, що перехід від до у буде таким же, як і від до , і обернене перетворення буде відрізнятися від прямого з точністю до знака відносної швидкості . Тоді можна розглянути три ІСВ , причому . Тоді для перетворень між ІСВ прийме вигляд:





,

.

Тоді, якщо прирівняти у другому рівнянні до та у першому рівнянні до , то можна отримати, що




.

Тоді, відповідно до принципа рівноправності ІСВ, можна записати, користуючись :

.

Накінець, якщо ввести принцип ізотропії простору в ІСВ [3], то можна стверджувати, що при інверсіях системи координат , перетворення не змінять вигляду. Тоді


,

з чого видно, що при повторній інверсії цей вираз перейде у початковий (до першої інверсії) тільки за умови, що є парною функцією швидкості, тобто, справджується рівність . Тому, застосовуючи , можна буде отримати:



.

Очевидно, що буде мати розмірність квадрату швидкості в -1 степені, а от знак цієї константи можна отримати лише експериментально. Експеримент же показує, що знак цієї константи додатній, а отже,

,

Тоді приймуть вигляд
,

тобто, вигляд одновимірних перетворень Лоренца для координат.
Чотиривимірні покомпонентні перетворення Лоренца
Якщо узагальнити перетворення Лоренца на випадок тривимірного простору, причому , то вигляд зміниться до


.

Використовуючи міркування, наведені у попередньому підрозділі, можна дійти висновку, що при збігові початку координат при початку відліку функції зв'язку координат при переході між ІСВ набудуть вигляду

.

Нехай далі для першої рівності розглядається точка , а для другої - (знову ж таки, через умову однорідності простору-часу загальність функцій через вибір особливих значень координат не зменшується). Тоді рівності



повинні виконуватись для будь-яких . Це означає, що

,

а отже, набуде вигляду

.

причому як наслідок рівноправності координат відносно умови .


Отримані рівності зв'язку штрихованих і нештрихованих координат можна спростити, використавши принцип рівноправності ІСВ. Оскільки ІСВ рівноправні, то відносна зміна повинна бути рівна , звідки . Обирається варіант , оскільки при формальний перехід від одної ІСВ до такої ж самої призводив би до інверсії осей.




Отже, . Таким чином, при русі по осі компоненти не змішуються одна з одною, а також - з , і перетворюються окремо. Це означає також, що коефіцієнти при у виразах для рівні нулю. З цього, накінець, слідує, що за описаних вище умов


.

Перетворення Лоренца для радіус-вектора
У довільному випадку, коли радіус-вектор не співнапрямлений з вектором відносної швидкості двох ІСВ, можна отримати більш загальний вигляд перетворень Лоренца, розклавши радіус-вектор на вектор, що паралельний вектору відносної швидкості, та вектор, що перпендикулярний вектору відносної швидкості. Тоді, використовуючи те, що, як слідує з минулого пункту, ортогональні по відношенню до вектора відносної швидкості компоненти радіус-вектора переходять самі у себе, можна отримати:
,

і
,


,

які є перетвореннями Лоренца для радіус-вектора.
Інтервал. Геометричний зміст перетворень Лоренца
З отриманих перетворень Лоренца елементарно вивести інваріантність величини
,

яка називається інтервалом (звичайно, його можна записати і у вигляді нескінченно малих приростів).

Для доведення достатньо розписати праву частину у явному вигляді, використовуючи перетворення Лоренца:

.

Інтервал має зміст відстані між подіями у чотиривимірному просторі-часі. Знак інтервала визначає тип цієї відстані.
Якщо дві події причинно пов'язані, то, приймаючи швидкість розповсюдження «події» рівною , можна записати вираз для інтервалу таким чином:

,

тобто, квадрат інтервалу завжди додатній. Відповідний інтервал називають часоподібним. Отриманий вираз є квадратом власного часу «події», який є інваріантним відносно будь-якої ІСВ (поняття власного часу тісно пов'язано з принципом найменшої дії).
Якщо ж дана умова не виконується, то інтервал називають простороподібним, і він виражає умову роз'єднаності в просторі подій при їх причинній незалежності.
Інтервал , який є модулем 4-вектора, компонентами якого є просторовими та часовими координатами - інваріант. При переході від однієї ІСВ до іншої інваріантом його залишають або паралельні переноси, або кручення базиса. Паралельні переноси лише зміщують початок координат, тому не є інтересними. Тоді залишаються лише кручення базиса, які у загальному вигляді при переході від ІСВ А до ІСВ А' можна представити так:

,

.

Звичайно, вирази залишають величину інтервалу інваріантною:


.

Якщо розташувати ІСВ А' на початку координат (тобто, ) та розділити на , можна отримати:


.

Застосовуючи до , можна отримати:

.

Вираз (4) є виразом для перетворень Лоренца просторової та часової координат.
Отже, узагальнюючи написане, можна стверджувати, що з набору аксіом, які були використані при виведенні перетворень Лоренца, слідує, що ми живемо у локально псевдоевклідовому просторі розмірності , причому інтервал набуває також змісту довжини 4-векторів у такому просторі.

Перетворення Лоренца для швидкості. Інваріантність фундаментальної швидкості та максимальність швидкості розповсюдження взаємодії
Якщо продиференціювати вирази та розділити перший вираз на останній, можна отримати

,

,

що є перетвореннями Лоренца для компонент швидкості.
Якщо продиференціювати вирази та розділити другий вираз на перший, можна отримати

,

що є перетвореннями Лоренца для вектора швидкості.


Для доведення цього доцільно розглянути дві ІСВ , у яких тіло має швидкість відповідно, причому вектор швидкостей, для спрощення, у обох випадках орієнтований по осі . Тоді, відповідно до перетворень Лоренца, при переході до ІСВ , що рухається зі швидкістю відносно ІСВ , компоненти швидкості змінюються таким чином:






;

;

.

Оскільки
,

,

то, з урахуванням і початкових припущень, вираз можна переписати:


.

Тоді можна виразити швидкість :

,

з чого видно, що швидкість інваріантна відносно будь-якої ІСВ.
Аналогічно можна отримати даний результат у більш загальному випадку для модуля вектора швидкості світла. Нехай у перетвореннях для вектора швидкості . Тоді, взявши модуль від перетворення для вектора швидкості і об'єднавши, у отриманій підкореневій рівності, перший доданок з останнім, другий - з четвертим, а третій - з п'ятим, можна отримати




,

що й треба було довести.
Наступна аксіома — принцип причинності [4], який накладає умови на максимальність швидкості розповсюдження взаємодії. Нехай подія, що відбулася в т. , є наслідком події, що відбулася в т. , швидкість розповсюдження взаємодії даної події є . Тоді, в ІСВ K,


.

Якщо ж записати для ІСВ К' , то, з урахуванням принципа причинності, можна буде отримати:
,

з чого видно, що швидкість є максимальною швидкістю розповсюдження взаємодії (, оскільки інакше перетворення Лоренца були б комплексними).

Залишається лише припустити, що величина чисельно рівна швидкості світла у вакуумі (підстави вибрати за цю константу саме швидкість світла у вакуумі були отримані, в основному, історично — через теорію Максвелла та досліди Майкельсона-Морлі).
Якщо ж додати принцип абсолютності одночасності подій відносно різних ІСВ, можна буде отримати класичні перетворення Галілея:
,

а отже, якщо класична механіка сформульована без протиріч, то релятивістська — також, оскільки вони базуються на однаковому наборі аксіом.
Перетворення Лоренца для сили
У рамках СТВ загальний вираз для вектора сили дається похідною від вектора імпульсу:
.

Для величини не вводиться ніякого позначення, оскільки у релятивістській фізиці, як видно із , вона не може бути названою прискоренням, виходячи із визначення сили як .



Сила, як 3-вектор, не є інваріантною у рамках СТВ. Для визначення закону зв'язку векторів сили відносно спостерігачів у ІСВ для сили, вектор якої співнапрямлений з вектором відносної швидкості ІСВ (який задає вісь ), треба послідовно знайти диференціали
.

Для початку, похідна від енергії по часу рівна
.

.

Далі треба знайти власний час частинки, інваріантний відносно будь-якої ІСВ. В принципі, вираз для нього уже був отриманий при аналізі інтервалу причинно пов'язаних подій, але доцільно буде отримати інше виведення. Для цього можна записати перетворення Лоренца для часу:
.

.

Проміжне перетворення було отримано так (приймається, що вісь співнапрямлена з вектором відносної швидкості ІСВ):



.

Якщо розділити на , можна буде отримати перетворення Лоренца для компонент сили:


,

.

,

.

Векторними перетвореннями сили при переході між ІСВ є, аналогічно до перетворень вектора швидкості як похідній по часу від перетворень радіус-вектора, похідна від виразу для перетворення вектора імпульсу по власному часу:
.

Обернене перетворення має такий вигляд:
.

Аналогічно з інтервалом та 4-вектором енергії-імпульсу, для сили є власний 4-вектор з компонентами, які отримуються шляхом диференціювання компонент 4-вектора енергії-імпульса по власному часу:
.

Форми запису перетворень Лоренца
Матричний запис перетворень Лоренца
Часто, особливо в англомовній літературі, перетворення Лоренца записують у вигляді матриці повороту ||Λα′β||, що переводить компоненти 4-вектора xβ системи K в компоненти 4-вектора xα′ = Λα′βxβ, системи K′:
- .

Формули перетворень Лоренца з довільною орієнтацією осей систем
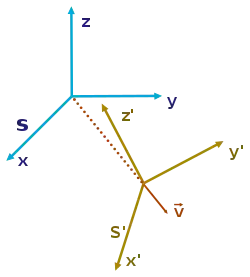
У випадку коли осі x координатних систем не паралельні швидкості формули перетворення були отримані Герглотцем у 1911 році. Для виводу цих формул зручно розділити радіус-вектор частки r в системі K на компоненту r||, яка паралельна швидкості V відносного руху інерціальних систем, та компоненту r⊥, яка перпендикулярна V. Тоді при переході до іншої системи K′ буде змінюватись тільки паралельна складова r||:

Остаточно для радіус-вектора частки в системі K′ r′ = r′|| + r′⊥ формули будуть виглядати так:
- ,

- .

Гіперболічна форма запису
З математичного погляду інтервал між двома подіями ((Δx)²+(Δy)²+(Δz)²-(cΔt)²) можна розглядати як аналог «відстані» між двома точками в чотиривимірному просторі Мінковського. Отже, згідно з визначенням, перетворення Лоренца мають зберігати незмінним будь-який інтервал у цьому просторі. Лінійними перетвореннями з такими властивостями є лише паралельні переноси та обертання системи координат. Паралельні переноси та обертання в площинах xy, yz, zx зводяться до переносу початку відліку простору та часу і звичайних просторових поворотів. Останні (повороти системи координат у трьох площинах tx, ty, tz) і є перетвореннями Лоренца.
Якщо ввести «кут повороту» ψ, такий що
- ,

то перетворення Лоренца для систем K та K′ із паралельними осями можна записати в гіперболічній формі:
- ct′ = -x shψ + ct chψ,
- x′ = x chψ — ct shψ,
- y′ = y,
- z′ = z.
Ці формули відрізняються від звичних формул перетворення координат при поворотах (в евклідовому просторі) заміною тригонометричних функцій гіперболічними. У цьому виявляються відмінність псевдоевклідового простору Мінковського від звичайного евклідового.
Перетворення Лоренца для електромагнітного поля
Релятивістські перетворення для компонент векторів тензора електромагнітного поля при переході від однієї ІСВ до іншої у псевдоевклідовому просторі-часі:

,

,

де - вектор відносної швидкості між ІСВ,

.

Перетворення можна отримати, маючи вираз для сили Лоренца та вираз для перетворення 3-вектора сили при переході між ІСВ:
.

.

Із перетворень видно, що вектори напруженості та індукції не є компонентами будь-яких 4-векторів, а входять до деякого антисиметричного 4-тензору (перетворення саме такого вигляду можна отримати у рамках СТВ для антисиметричних тензорів).
Отримання перетворень для напруженості електричного поля
В силу принципу відносності вибір ІСВ не може позначитися на загальності перетворень, що були отримані для переходу між обраними ІСВ. Це дозволяє спростити вирази, наприклад, для перетворення 3-вектора сили при переході до нової ІСВ.
Нехай у ІСВ А пробний заряд покоїться, . Тоді у ІСВ А', що рухається із швидкістю , заряд має швидкість . Тоді, використовуючи , можна записати:




.

Звідси слідує, що
.

З урахуванням того, що відносно ІСВ А сила , що діє на пробний заряд , рівна


,

а відносно ІСВ А' ця ж сила рівна
,

можна перетворити :

,

де враховано, що у доданку при .


Отже,
,

що і є шуканим перетворенням Лоренца для вектора напруженості електричного поля.
Обернене перетворення отримується шляхом замін
:

.

Нехай, навпаки,
.

Тоді вираз набуде вигляду:

.

Проміжний вираз був отриманий із виразу наступним чином:

.

З цього виразу, окремо, слідує інваріантність продольної (до вектора швидкості пробного заряду) компоненти напруженості поля. Дійсно, напруженість поля не залежить від швидкості пробного заряду, а отже, вибір не обмежує загальності .
Якщо вибрати орієнтацію осей ІСВ таким чином, що , то зручно також розписати покомпонентно. Дійсно,


.

Перетворення Лоренца для вектора індукції магнітного поля
Маючи перетворення для напруженості електричного поля, можна знайти перетворення для індукції магнітного поля. Це не є випадковістю, оскільки індукція визначається через швидкість ІСВ і напруженість електричного поля.
Для початку, вираз можна домножити зліва на швидкість ІСВ , після чого - підставити зправа вираз . Тоді
.




.

Проміжний вираз можна вивести наступним чином.

Нехай . Перетворення матиме вигляд:

.

Якщо його векторно домножити зліва на , то зправа залишаться лише один доданок:
.

Тоді, використовуючи вираз , перетворення Лоренца для вектора швидкості за цієї умови і вирази для сил , можна записати:

.

Тоді зліва можна буде отримати
,

а зправа, використовуючи ,
.

Прирівнявши ліву і праву частини, можна буде отримати, що
.

Цей вираз, знову ж таки, означає інваріантність продольної (по відношенню до вектора швидкості заряда) компоненти вектора магнітної індукції при перетвореннях Лоренца.
Аналогічно до перетворень із напруженістю електричного поля, із можна отримати:
.

Прийнявши , можна розписати покомпонентно:

.

Інваріанти перетворень Лоренца для полів та їх зміст
Використовуючи , можна показати інваріантність наступних виразів:

.


.





.


Розглядаючи ці інваріанти, можна зробити декілька важливих висновків.
1. Якщо , то можна вибрати ІСВ таку, що у ній (нуль-вектор ортогональний будь-якому вектору). Це значно спрощує розв'язок рівнянь Максвелла і аналіз динаміки заряджених тіл у полі. Якщо ж друга умова не виконується, то вибрати таку ІСВ неможливо.


2. Аналогічно, якщо , можна вибрати ІСВ таку, що у ній .


3. Якщо у деякій ІСВ , то при переході до іншої ІСВ, у загальному випадку, буде як електричне, так і магнітне поля, причому вектори індукції магнітного поля і напруженості електричного поля будуть ортогональними.

4. Плоска хвиля, для якої , залишається такою у будь-якій ІСВ.

Перетворення Лоренца для загального поля
Довільні стани невзаємодіючої багачастинкової системи (стани Фока) у КТП перетворюються за правилом[1]
-
( )

де: W(Λ, p) — поворот Вігнера і D(j) — (2j + 1)-вимірне представлення SO(3).
Примітки
- Weinberg, 2002, Chapter 3
Див. також
Література
- Ландау Л. Д., Лифшиц Е. М. Теоретическая физика: Учеб. пособие. В 10 т. Т. II Теория поля. — М.: Наука, 1988. ISBN 5-02-014420-7.
- Паули В. Теория относительности. — М.: Наука, 1991. ISBN 5-02-014346-4.
