Схеми вертольотів
Схема вертольота описує кількість несучих гвинтів вертольота, а також тип пристроїв, які використовуються для управління вертольотом.
Зусилля для розкручування несучого гвинта може передаватися від рухової установки через осьовий вал. У цьому випадку за третім законом Ньютона виникає реактивний момент, що закручує корпус вертольота в протилежний від обертання несучого гвинта бік (на землі такому обертанню перешкоджає шасі апарата).
Існує ряд основних конструктивних схем компенсації реактивного моменту і управління вертольота з використанням як єдиного, так і декількох несучих гвинтів.
У випадках, коли розкручування несучого гвинта здійснюється або потоком повітря яке набігає (автожири, вертольоти в режимі польоту на авторотації), або за допомогою реактивних струменів, розташованих на кінцях лопатей (реактивний вертоліт), реактивний момент не виникає, і відповідно, необхідність в його компенсації відсутня.
Одногвинтові схеми з кермовим пристроєм
В таких схемах для компенсації реактивного моменту використовуються пристрої, що створюють тягу, яка закручує вертоліт в протилежному реактивному моменту напрямку. Перевагою таких схем є їх відносна простота, однак при цьому відбувається відбір потужності силової установки вертольота.
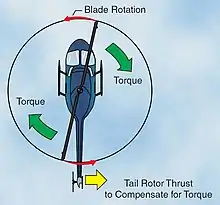
Вертольоти одногвинтової схеми з кермовим гвинтом

У даній схемі гвинт невеликого діаметра розташовується на хвостовій балці вертольота на деякій відстані від осі несучого гвинта. Створюючи тягу в площині, перпендикулярній вертикальній осі вертольота, кермовий гвинт компенсує реактивний момент. Змінюючи тягу кермового гвинта, можна керувати поворотом вертольота щодо вертикальної осі. Більшість сучасних вертольотів виконано за одногвинтовою схемою.[1]
Вперше її запатентував на своєму літальному апараті Борис Юр'єв разом з автоматом перекосу в 1912 році[2]. Однак першу подібну модель запропонував в 1874 році німецький конструктор Аченбах.[3]
Перший успішний вертоліт VS-300 з рульовим гвинтом побудував Ігор Сікорський, вертоліт піднявся в повітря 13 травня 1940 року. Успіх даного вертольота полягає в тому, що на основі цієї моделі для американської армії серійно випускався вертоліт R-4.
Незаперечною перевагою даної схеми є простота конструкції і системи керування, що призводить до зменшення витрат на виробництво, ремонт і обслуговування. Крім того, випускають вертольоти, наприклад Мі-28, з так званим Х-подібним, чотирилопатевим кермовим гвинтом, лопаті якого мають різні взаємні кути установки на втулці (на зразок букви X). Гвинт такого типу має переваги перед звичайним (з рівномірним азимутним розподілом лопатей) за рівнем шуму і зменшення несприятливого впливу на лопаті кінцевих вихрових шнурів, що генеруються сусідніми лопатями.
Недоліки даної схеми:
- кермовий гвинт відбирає частину потужності двигуна (до 10%) і в той же час не дає ні підйомної сили, ні тяги, спрямованої вперед;
- повітряний потік від несучого гвинта погіршує характеристики кермового гвинта, внаслідок цього кермовий гвинт намагаються розміщувати якомога вище на хвостовій балці;
- кермовий гвинт є досить уразливим при польотах поблизу землі;
- кермовий гвинт, так само як і несучий, може потрапляти в небезпечний режим вихрового кільця, що обмежує можливості маневрування;
- вузький діапазон можливих центровок.
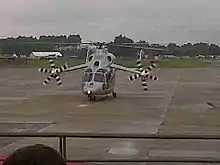
Вертольоти з рульовим гвинтом в кільці, фенестрон

У сучасному вертольотобудуванні іноді застосовують багатолопатевий кермовий гвинт в кільцевому каналі кіля — фенестрон (від лат. fenestra - вікно)[4]. Діаметр фенестрона у понад два рази менше, ніж діаметр звичайного кермового гвинта. Вперше застосований на легких вертольотах французької фірми «Aérospatiale». Використовується в конструкціях легких і середніх вертольотів[5]
Така конструкція має кілька суттєвих переваг:
- зменшується шкідливий опір вертольота;
- зникає ризик зачіпання обертовими лопатями кермового гвинта за наземні предмети при маневруванні на гранично малих висотах, а також травмування людей при роботі вертольота на землі;
- ефективність вище, ніж у відкритого кермового гвинта при однакових діаметрах.
Недоліками є:
- значне збільшення товщини і маси кіля, що робить установку фенестрона на важкі вертольоти недоцільним;
- високочастотний шум;
- нелінійності в характеристиках шляхового маневру.
Гвинтокрил
У цій схемі використовуються гвинти, розташовані на крилах або фермах літального апарату - гвинтокрила. Причому тяга обох гвинтів спрямована вперед, а для компенсації реактивного моменту в режимі висіння один з гвинтів забезпечує більшу тягу, ніж інший. У режимі польоту ці гвинти використовуються як тягнучі, що збільшує швидкість гвинтокрила, при цьому несучий гвинт переходить в режим авторотації. Перший апарат з таким принципом компенсації реактивного моменту запропонував і запатентував Б. М. Юр'єв в 1910 році[6]. Прикладом такої моделі в даний час може служити Eurocopter X3.
Перевагою гвинтокрила можна вважати високі швидкості польоту, недосяжні для класичної схеми в силу особливостей аеродинаміки. Так, наприклад, гвинтокрил «Ротодайн» фірми «Фейрі» в 1959 році досяг швидкості в 307,22 км/год,[7], а Eurocopter X3 у 2010 році — 430 км/год.
Недоліком такої системи є втрата більшої потужності на компенсацію реактивного моменту в режимі висіння в порівнянні з кермовим гвинтом.
Однак не всі гвинтокрилі використовують даний спосіб компенсації. Наприклад, гвинтокрил Ка-22 використовував для протидії реактивному моменту пару поперечних гвинтів, а Ротодайн — реактивне обертання лопатей.
Поперечні гвинти встановлюються на кінцях крил або спеціальних опор (ферм) з боків корпусу вертольота. До поперечної схеми можна віднести і деякі конвертоплани в вертолітному режимі, наприклад Bell V-22 Osprey, Bell Eagle Eye.
Струменева система управління, NOTAR
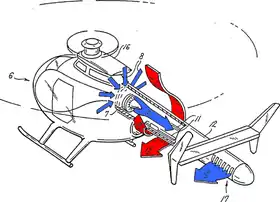
Для компенсації реактивного моменту використовується система управління прикордонним шаром на хвостовій балці, яка застосовує ефект Коанда, разом з реактивним соплом на кінці балки, або ж тільки реактивне сопло.
Керуюча сила ефекту Коанда виникає з тієї ж причини, з якої виникає підйомна сила крила - через несиметричне обтікання профілю хвостової балки низхідним повітряним потоком, утвореним несучим гвинтом. Вентилятор, розташований біля основи хвостової балки засмоктує повітря з отворів, розташованих вгорі корпусу вертольота, створюючи необхідний підвищений тиск всередині хвостової балки. На правій стороні хвостової балки за допомогою спеціальних сопел встановлюється більш швидкий рух повітряного потоку, ніж на лівій стороні. Тим самим, внаслідок закону Бернуллі, тиск повітря на лівій стороні буде більше, ніж на правій, ця різниця тисків призводить до появи сили, спрямованої зліва направо.
Примітка: на схемі синіми стрілками показані потоки повітря, що проходять через хвостову балку, червоними - по поверхні хвостової балки.
На Заході відома як NOTAR, англ. No Tail Rotor — «без хвостового гвинта». У Радянському Союзі експерименти проводилися на вертольоті Ка-26-СС. Серійно вертольоти, що використовують таку схему, випускаються компанією «MD Helicopters».
Дана система через відсутність кермового гвинта є найтихішою і безпечною.
Одногвинтові схеми з реактивним принципом обертання лопатей
У цих схемах через відсутність трансмісії, передаючий крутний момент від силової установки до несучого гвинта, не вимагає компенсації реактивного моменту. Перевагою таких схем є проста конструкція, а загальним недоліком можна вважати невелику швидкість при значній витраті палива. Для управління по рисканню може використовуватися кермовий гвинт, поверхні які відхиляються або реактивні пристрої.
Існують різні варіанти цієї схеми:
- з установкою прямоточних повітряно-реактивних двигунів на закінцівках лопатей;
- з соплами на закінцівках лопатей і подачею гарячого вихлопу на них від розташованого в фюзеляжі газотурбінного двигуна ( «привід гарячого циклу»), в цьому випадку лопаті несучого гвинта виготовляються з жароміцних сплавів;
- компресорний привід «холодного циклу»: газотурбінний двигун в корпусі вертольота запускає компресор, а стиснене повітря від нього підводиться через трубопроводи до сопел на закінцівках лопатей;
- також в ряді експериментальних вертольотів початку 20-го століття роль реактивних двигунів грали пропелери, встановлені на кінцях лопатей, наприклад вертоліт Кертіса-Блекера[8].
Найперший реактивний гелікоптер спроектував і побудував німецький конструктор Добльгоф.[9] Експериментальні реактивні вертольоти будувалися також у Польщі, в США їх розробкою на замовлення військових досить довго займалася фірма «Хьюз». Однак більшого успіху досягла американська компанія «Hiller», яка випускала вертольоти YH-32 «Хорнет» і HJ-1 «Колібрі» малими серіями для армії, флоту і поліції[10]. У 1956 році в американець російського походження Євген Глухарев підняв в повітря перший реактивний ранцевий вертоліт MEG-1X[11]. На даний момент вертольоти з реактивним приводом серійно не виробляються.
Основною перевагою такої схеми є проста і порівняно легка конструкція, що виключає складну трансмісію. Головними недоліками такого компонування вважається:
- занадто велика витрата палива;
- гучність;
- складність виготовлення герметичних втулок;
Для варіанту з повітряно-реактивними двигунами до того ж:
- складності з безпечним зниженням на авторотації;
- необхідність в додатковому стартовому пристрої, який розкручує несчий гвинт;
- велика помітність в темний час доби через яскраві вогні двигунів.
- вогонь, що виривається з сопел («привід гарячого циклу») засліплює пілота, особливо в нічний час.
Схеми з двома несучими гвинтами
Реактивні моменти в таких схемах взаємно компенсуються синхронним різноспрямованим обертанням двох гвинтів. Площині обертання гвинтів можуть мати різні ступені перекриття при кількості лопатей менше чотирьох.
Загальною перевагою таких схем є відсутність втрат потужності на компенсацію реактивного моменту, однак такі схеми мають комплексну складність:
- необхідність жорсткої синхронізації несучих гвинтів, як по частоті обертання, так і в органах управління;
- збільшенням маси несучої системи і системи управління;
- підвищеним лобовим опором несучої системи.
Поздовжня схема

Поздовжня схема складається з двох горизонтальних гвинтів, розташованих один за одним які обертаються в різних напрямках. Задній гвинт піднятий над переднім для зменшення негативного впливу повітряного струменя від переднього гвинта. Дана схема в основному використовується в вертольотах великої вантажопідйомності. Вертольоти з поздовжньою схемою іноді називають «літаючими вагонами».[12]
Першопрохідцем у створенні вертольота, побудованого за поздовжною схемою, став французький інженер Поль Корню. У 1907 році його апарат зміг відірватися від землі на 20 секунд. При першому випробуванні апарат відірвався від землі спочатку на 0,3 м (повна маса 260 кг), потім на 1,5 м (повна маса 328 кг)[13].
Подальшим розвитком даної конструкції зайнявся американець Франк П'ясецький, випустивши в 1945 році для армії США вертоліт, який через свою форми отримав назву «літаючий банан».
Така конструкція має кілька суттєвих переваг:
У Радянському Союзі теж велися роботи в цьому напрямку. У 1952 році під керівництвом Ігоря Олександровича Ерліха[14] після всього лише 9 місяців з початку проектування відбувся перший політ Як-24, який перевершував по тому часу всі зарубіжні зразки.[15]
Позитивними сторонами цієї схеми вертольота є:
- великий обсяг вантажного відсіку.[16];
- великий допустимий діапазон експлуатаційних центровок. Можливість використання майже всього об'єму вантажного простору без втрати у керованості.
До недоліків поздовжньої схеми вертольота відносяться:
- поява значних вібрацій в деяких режимах польоту. Цей ефект особливо сильно проявлявся на ранніх моделях вертольотів;
- деяке погіршення коефіцієнта корисної дії заднього несучого гвинта. Для вирішення цієї проблеми задній гвинт розташований вище щодо переднього;
- неповна компенсація реактивних моментів гвинтів, яка призводить до появи паразитної бічної сили;
- деяка несиметричність стійкості і керованості в дорожньому відношенні;
- складна трансмісія.
Гвинтокрил
Перевагою гвинтокрила можна вважати високі швидкості польоту, недосяжні для класичної схеми в силу особливостей аеродинаміки. Так, наприклад, гвинтокрил «Ротодайн» фірми «Фейрі» в 1959 році досяг швидкості в 307,22 км/год,[7], а Eurocopter X3 у 2010 році — 430 км/год.

Поперечні гвинти встановлюються на кінцях крил або спеціальних опор (ферм) з боків корпусу вертольота. До поперечної схеми можна віднести і деякі конвертоплани в вертолітному режимі, наприклад Bell V-22 Osprey, Bell Eagle Eye.
У 1921 році американський інженер Генрі Берлінер разом з батьком Емілем Берлінером спроектував вертоліт поперечної схеми. Він розмістив по боках літакового фюзеляжу два невеликих, чотириметрових гвинта, а на хвості кермовий пропелер з вертикальною віссю обертання - він повинен був «задирати» хвіст апарату, щоб у гвинтів з'являлася горизонтальна складова тяги для руху вертольота вперед. Для управління вертольотом використовувалися поверхні які відхилялися, типу елеронів, а також осі несучих гвинтів які нахиляються.[17] Першим успішним вертольотом поперечної схеми став німецький Focke-Wulf Fw 61, який в 1937 році поставив ряд рекордів по дальності і швидкості. У Радянському Союзі першим вертольотом поперечної схеми став проект «Омега» 1941 року.[18]
Переваги:
- високий коефіцієнт корисної дії несучих гвинтів внаслідок відсутності взаємного впливу повітряних потоків від цих гвинтів;
- найбільш вигідна схема з точки зору стійкості і керованості внаслідок аеродинамічної симетрії.
До недоліків цієї схеми слід віднести:
- складну трансмісію;
- підвищену вагу конструкції;
- підвищений лобовий опір.
Співвісна схема
Дана система через відсутність кермового гвинта є найтихішою і безпечною.

Співвісна схема являє собою пару гвинтів, розташованих один над іншим на співвісних валах, що обертаються в протилежні сторони, завдяки чому компенсуються реактивні моменти, що виникають від кожного з гвинтів.
Перший патент на співвісне розташування несучих гвинтів літального апарату був виданий в 1859 році англійцю Генрі Брайту.
На початку 1920-х Рауль Петерас-Пескара працював над вертольотом співвісної схеми, в якому вперше застосував для управління вертольотом автомат перекосу.
Першим повністю керованим став вертоліт Лабораторний ґіроплан, побудований Шарлем Луї Бреге і Рене Дораном в 1936 році [19][20].
Перший політ вертольота співвісної схеми з повністю металевими лопатями здійснив американець Стенлі Хіллер у 1944 році. Конструкція виявилася настільки вдалою, що сам Хіллер часто демонстрував його стійкість, відпускаючи важелі управління і висовуючи руки з вікон.[21]
У Радянському Союзі темою співвісних вертольотів вперше зайнявся колектив Яковлева у 1944 році, трохи пізніше у 1945 році за роботу взявся колектив ентузіастів під керівництвом М. В. Камова. Варто відзначити, що ще у Російській імперії перші два прототипи вертольота Ігоря Сікорського (творця першого успішного вертольота класичної схеми VS-300) були виконані за співвісною схемою[19].
Вертоліт Яковлєва «Жарт» вперше піднявся в повітря 20 грудня 1947 року[22], а вертоліт Камова Ка-8 — дещо раніше, 12 листопада 1947 року[23]. Однак саме для конструкторського бюро Камова співвісна схема стала основною, донині вертольоти Камова — єдині в світі вертольоти з співвісною схемою, що випускаються серійно.
Переваги співвісної схеми:
- мінімальні габаритні розміри, так як лопаті співвісних гвинтів коротше лопатей несучих гвинтів вертольотів з кермовим гвинтом схожого класу. Потрібен мінімальний у порівнянні з іншими схемами злітно-посадковий майданчик;
- компактність трансмісії. Практично вся трансмісія розташована вздовж одного вала;
- порівняно просте управління. Всі органи управління розташовані поруч з трансмісією, причому при здійсненні маневрів не витрачається додаткова потужність від двигунів;
- краща стійкість при прямолінійному русі на великій швидкості внаслідок зменшення вібрацій;
- менше число критично вразливих вузлів, таких як хвостова балка і кермовий гвинт одногвинтових вертольотів;
- більша порівняно з традиційною схемою тягооснащеність — мінімум на 20 % на режимі висіння. Немає втрати потужності на кермовий гвинт, до того ж нижній гвинт працює не повністю в повітряному потоці верхнього гвинта, а підсмоктує додаткове повітря;
- аеродинамічна симетрія схеми. Апарат співвісної схеми може здійснювати політ у будь-якому напрямку практично з однаковою ефективністю;
- зменшення вібрацій, чому сприяють менші розміри несучих гвинтів;
- безпека для персоналу який обслуговує вертоліт. Відсутність хвостового гвинта зменшує ймовірність травм.
Недоліки:
- погіршення коефіцієнта корисної дії несучих гвинтів через їх взаємний вплив у різних режимах польоту у порівнянні з поздовжньою і поперечною схемами;
- складність виробництва, ремонту та обслуговування;
- порівняно велика висота вертольота внаслідок великої відстані між гвинтами, це в свою чергу збільшує аеродинамічний опір, який негативно позначається на максимальній горизонтальної швидкості;
- ймовірність перехльосту лопатей на критичних режимах польоту. Перехліст може наступати приблизно в таких же режимах польоту, що і у несучого гвинта з хвостовою балкою класичної схеми;
- дещо більша швидкість планування на режимі авторотації, тобто самообертання несучих гвинтів під дією набігаючого повітряного потоку;
- більш важке забезпечення шляхової стійкості через властивий схемі короткий фюзеляж, тому більшість співвісних вертольотів має розвинене вертикальне оперення.[24]
Перехресні лопасті

Несучі гвинти розташовані з боків фюзеляжу зі значним перекриттям, а їх осі нахилені назовні під кутом один до одного, виключаючи таким чином можливість накладання. Фактично така схема є рідким різновидом поперечної схеми з максимально можливим перекриттям несучих гвинтів, в той же час має деякі властивості співвісної схеми. Через нахил гвинтів реактивні моменти врівноважуються тільки відносно вертикальної осі, а їх проекції щодо поперечної осі складаються, утворюючи момент тангажа.[1]
Перші серійні вертольоти цієї схеми Флеттнер FI 282 "Колібрі" з'явилися в Німеччині в 1942 році. Зараз єдиним серійним виробником подібних вертольотів є американська компанія Kaman Aircraft. Відмінною особливістю даної фірми є використання в системі управління вертольотом сервозакрилок, встановлених на лопатях, принцип дії яких схожий з елероном літака.
Переваги:
- мінімальні габаритні розміри;
- проста і легка трансмісія;
- мала відносна вага конструкції;
- симетричність відносно аеродинаміки.
Недоліки:
- погіршення коефіцієнта корисної дії несучих гвинтів внаслідок взаємного впливу їх один на одного;
- виникнення поздовжнього моменту, який ускладнює балансування вертольота.
Багатогвинтова схема

В основному вертольоти даної конструкції використовують чотири гвинти, одна пара з яких розташована за поздовжньою схемою, а інша — за поперечною, хоча зустрічаються конструкції з трьома несучими гвинтами (Мі-32, Cierva Air Horse), так і з великою кількістю гвинтів (Мультикоптер). Відрізняється великою вагою, але разом з тим простотою управління, так як така схема не вимагає автомата перекосу, а напрямок польоту задається регулюванням потужності на кожному з гвинтів окремо. У даний момент користується все більшою популярністю у радіокерованих вертольотах. Схема спочатку була представлена в прототипах початку двадцятого століття на зорі авіації. До вертольотів такої схеми можна віднести квадрокоптер Георгія Ботезата, колишнього професора Петроградського технологічного інституту, який емігрував в Америку; вертоліт Етьєна Емішена, який крім 4 несучих гвинтів мав 6 невеликих пропелерів для підтримки рівноваги і 2 гвинти для горизонтального польоту[25] До багатогвинтової схеми можна віднести і деякі конвертоплани, наприклад Curtiss-Wright X-19, Bell X-22, Bell Boeing Quad TiltRotor (проект).
Примітки
- Богданов и др., 1990.
- Мир вертолётов. Поиски схемы (рос.). aviastar.org. Архів оригіналу за 19 червня 2012. Процитовано 4 квітня 2012.
- Achenbach 1874 Вертолет Аченбаха, 1874 (англ.). aviastar.org. Процитовано 4 квітня 2012.
- ФЕНЕСТРОН
- Одновинтовые вертолеты с фенестроном " Малая энциклопедия вертолетостроения.
- Вертолет Юрьева 1910 года
- История вертолетных рекордов — 0051.htm[недоступне посилання з липня 2019]
- Вертолет Кёртиса-Бликкера (рос.). http://aviastar.org. Архів оригіналу за 19 червня 2012. Процитовано 4 квітня 2012.
- Вертолет Doblhoff WNF 342 (рос.). http://www.aviastar.org. Архів оригіналу за 19 червня 2012. Процитовано 4 квітня 2012.
- Реактивные вертолеты (рос.). http://www.aviastar.org. Архів оригіналу за 19 червня 2012. Процитовано 4 квітня 2012.
- Портативный вертолет Глухарёва Meg-1 (рос.). http://www.aviastar.org. Архів оригіналу за 19 червня 2012. Процитовано 4 квітня 2012.
- Яковлев ЯК-24 Транспортно-десантный вертолёт Архівовано 6 грудня 2016 у Wayback Machine. // vertopedia.ru
- Поль Корню. Изобретатель первого вертолёта.
- Российские немцы. История и современность Архівовано 19 квітня 2012 у Wayback Machine. // rdinfo.ru
- Яковлев Як-24 // airwar.ru
- Boeing Vertol СН-47 CHINOOK Многоцелевой транспортный вертолёт Архівовано 13 жовтня 2016 у Wayback Machine. // vertopedia.ru
- Вертолет Берлинера
- Первый вертолет СССР — «Омега»
- Gyroplane Laboratoire (рос.). http://www.aviastar.org. Архів оригіналу за 19 червня 2012. Процитовано 4 квітня 2012.
- A History of Helicopter Flight (англ.). Архів оригіналу за 19 червня 2012. Процитовано 4 вересня 2012.
- Вертолет Хиллер Xh-44-r (рос.). http://www.aviastar.org. Архів оригіналу за 19 червня 2012. Процитовано 4 квітня 2012.
- Яковлев ЭГ
- Вертолет Ка-8 (рос.). http://www.aviastar.org. Архів оригіналу за 19 червня 2012. Процитовано 4 квітня 2012.
- {{{Заголовок}}}.
- В арьергарде авиации (рос.). Архів оригіналу за 19 червня 2012. Процитовано 4 квітня 2012.
Джерела
- Конструкция вертолетов: Учебник для авиационных техникумов / Ю. С. Богданов, Р. А. Михеев, Д. Д. Скулков. — М. : Машиностроение, 1990. — 272 с.: ил с. — ISBN 5-217-01047-9; ББК 39,57я723 Б73; УДК 629.735.45.0.
- Аэродинамический расчет вертолетов / Академик Б. Н. Юрьев. — М. : Государственное издательство оборонной промышленности, 1956. — 272 с.: ил с.
- Винтовые летательные аппараты / Камов Н.И. — М. : Оборонгиз, 1948.