Технічна система
Техні́чна систе́ма (ТС) — це штучно створена сукупність елементів і відношень (зв'язків) між ними, які утворюють цілісну структуру об'єкта, що має властивості, які не зводяться до властивостей елементів і призначена для виконання корисних функцій.
Загальна характеристика
ТС складається з елементів (складових частин, що розрізняються властивостями, які виявляються при взаємодії), з'єднаних зв'язками (лініями передачі одиниць або потоків чого-небудь), які вступають у певні відносини (умови і способи реалізації властивостей елементів) між собою та із зовнішнім середовищем, щоб здійснити процес (послідовність дій для зміни або підтримки стану) і виконати функцію ТС (призначення, роль).
Отже, ТС має:
- призначення (ТС виконує корисні функції);
- структуру і принцип роботи (сукупність елементів, їх взаємне розташування та зв'язки між ними, що задають стійкість і відтворність функції ТС);
- нову якість, що не є простою сумою властивостей елементів, що входять у її склад (інакше втрачається зміст створення системи).
Призначення (функція) технічної системи
ТС призначені задовольняти різноманітні потреби людини, причому не лише суто матеріальні, а й духовні. Ці потреби реалізуються за допомогою виконання системами певних дій — функцій, які заздалегідь закладені як у саму систему, так і в кожен її елемент. Поряд зі словом «функція» часто використовується слово «призначення», особливо при розгляді не технічних об'єктів.
Виконання необхідної функції — головна мета і основа розроблення технічної системи. У той же час, сама система слугує лише її матеріальним носієм, тобто, функція — первинна, система — вторинна й створюється через неможливість іншими, нематеріальними засобами задовольнити відповідні потреби людей. Так, автомобіль служить для перевезення вантажів і людей (функція — переміщати в просторі матеріальні об'єкти), призначення ручки — писати, а книги чи компакт-диска — зберігати інформацію тощо.
Функція, яка розкриває призначення системи і заради якої ця система створюється, називається головною функцією. Функція, без виконання якої неможливе виконання головної функції є основною функцією.
З метою підвищення ефективності та якості реалізації головної функції може виникнути потреба в додаткових функціях, виконання яких буде здійснюватися цією ж системою або введеною в неї новою частиною. Такі функції називають допоміжними або сервісними.
Структура і принцип роботи технічної системи
ТС включає такі види технічних об'єктів, як вироби (від невеликої гайки чи шайби до великих турбін) та споруди (від дрібних будівель до великих транспортних мереж, технічних комплексів, промислових комбінатів). Поза людським суспільством технічні системи не існують — людьми розробляються, виготовляються та експлуатуються, і вже від початку фактично є складовою частиною комбінованих, людино-технічних систем (їх ще називають людино-машинними системами).
Будь-яка технічна система, перш за все, є фізичним об'єктом. І правильний вибір принципових, тобто фізичних, основ функціонування зумовить її життєздатність та ефективність. Так, скільки б не вдосконалювали конструкцію літака з гвинтомоторним рушієм, він ніколи не досягне надзвукової швидкості, не кажучи вже про польоти на великих висотах. Тільки використання іншого фізичного принципу, наприклад, реактивного руху і створеного на його основі реактивного двигуна, дозволить подолати звуковий бар'єр. Принцип роботи технічної системи — це послідовність виконання певних дій, що базуються на певних фізичних явищах (ефектах), які забезпечують необхідне функціонування цієї системи.
Характеристикою геометричного образу технічної системи, її зримого уявлення служить структура об'єкта (технічної системи), тобто форма, кількість і взаємне розташування елементів, частин і тіл, складових або представляють розглянуту систему-об'єкт. Прикладами відображення структури є блок-схема алгоритму, складальний кресленик, схема, план тощо.
Поняття структури ТС відрізняється від поняття структури процесу, що характеризує послідовність і склад стадій та етапів роботи, сукупність процедур і залучених технічних засобів, взаємодія учасників процесу.
Ієрархія технічних систем
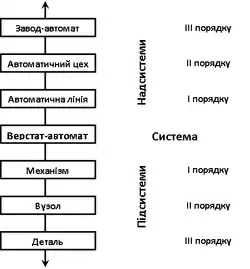
Системний підхід вимагає розглядати систему як частину надсистеми, з елементами котрої вона пов'язана, а окремі елементи системи можна в свою чергу розглядати як підсистеми.
Наприклад, для верстата-автомата, як технічної системи (Рис.) автоматична лінія є надсистемою І порядку, автоматичний цех — надсистема II порядку, а завод-автомат — надсистема III порядку. Підсистемами І порядку для верстата-автомата будуть механізми головного руху, подачі, автоматичної зміни інструменту тощо. Підсистемами II порядку, наприклад, для механізму головного руху є шпиндельний вузол, коробка швидкостей, електродвигун, а для шпиндельного вузла підсистемою III порядку будуть шпиндель, опори, кришки, болти й ін.
Види технічних систем
У процесі роботи технічні системи перетворюють енергію та інформацію, властивість і стан речовини. Залежно від призначення та принципу дії системи поділяють на машини, апарати та прилади. У випадках, коли складно визначити приналежність системи, використовують поняття «пристрій» або «комплекс», як, наприклад, пристрій регулювання, космічний комплекс тощо.
Поділ технічних об'єктів на машини, апарати та прилади тощо та на «технічні системи» носить умовний характер. Системою може бути певна сукупність самодостатніх машин, апаратів чи приладів і, в той же час, система чи декілька систем можуть бути складовими тих же машин, апаратів чи приладів.
Наприклад, один із агрегатів автомобіля — двигун внутрішнього згоряння має систему живлення, систему мащення, систему запалювання тощо, які є його складовими, і які виконують певні функції, і не є самодостатніми технічними об'єктами. В той же час, така технічна система як «система ППО» включає самодостатні технічні об'єкти, однак, виконувати свої функції на необхідному рівні вони можуть тільки у складі єдиної системи.
Машини
До машин відносяться технічні системи, котрі призначені для отримання або перетворення механічної енергії. Основу машин складають механізми, тобто системи рухомо пов'язаних між собою твердих тіл (ланок), що контактують між собою і які здійснюють конкретні механічні рухи. Так, до машин належать автомобіль (колісна машина), паровий двигун (парова машина) тощо.
Апарати
До апаратів відносяться технічні системи, які призначені для отримання або перетворення інших (у тому числі і механічної) видів енергії. Їх прикладами можуть служити телевізор (телевізійний апарат, перетворює електромагнітні сигнали в візуально-звукову інформацію), телефон (телефонний апарат, здійснює взаємне перетворення звукових і електричних сигналів), фотоапарат, ракета (космічний апарат), реактор (ядерний або хімічний реактор, що змінює допомогою реакцій властивість і/або стан речовини) і т. д.
Прилади
До приладів відносять технічні системи, що мають допоміжне призначення (контроль, керування, вимірювання, регулювання)[1], призначені для полегшення праці людини шляхом часткової або повної її заміни. Залежно від принципу роботи прилади поділяють на механічні (гіроскоп, відцентровий регулятор тощо), електричні (вольтметр, гальванометр тощо), оптичні (мікроскоп, телескоп тощо) і т. д., а також на прилади комбінованої дії (оптико-електронні, електромеханічні прилади тощо).
Опис технічних систем
Науковий опис технічних систем включає:
- 1. Параметричний — опис властивостей, ознак та відношень об'єкта на основі емпіричних спостережень. Це найбільш проста форма і вихідний рівень дослідження об'єкта.
- 2. Морфологічний — перехід до визначення поелементного складу, побудови об'єкта та взаємовідносин параметрів, які виявлені на попередньому рівні.
- 3. Функціональний — перехід до визначення функціональної залежності між параметрами (функціонально-параметричний опис), між елементами об'єкта (функціонально-морфологічний опис) або між параметрами і побудовою об'єкта.
- 4. Фізичний (поведінка об'єкта) — виявлення цілісної картини «життя» об'єкта і механізмів, які забезпечують зміну напрямів та «режимів» роботи об'єкта (найбільш складна форма наукового дослідження).
Наприклад: параметричний опис металорізального верстата, як технічної системи – це: основні технічні характеристики (технологічні, розмірні, кінематичні, силові, динамічні) та показники (продуктивність, точність, жорсткість, потужність, габарити тощо).
Морфологічний опис верстата включає: джерело енергії, двигуни, передавально-перетворюючі та виконавчі механізми, систему керування.
Функціонально-параметричний опис установлює, наприклад, залежність точності обробки від жорсткості пружної системи верстата і режимів різання. Прикладом функціонально-морфологічного опису служить рівняння балансу кінематичного ланцюга.
Розвиток технічних систем

Опис розвитку технічних систем описується законами: «статики» (початок життя), «кінематики» (розвиток) і «динаміки» (головні тенденції розвитку в нинішній час).
Закони статики: 1) «повнота частин» — наявність і мінімальна працездатність основних частин технічних систем; 2) «енергетична провідність» — наскрізний прохід енергії всіма частинами технічних систем; 3) походження «ритміки» частин — частоти коливань, періодичності роботи всіх частин.
Закони кінематики: 1) «підвищення ступеня ідеальності» — витрати на виготовлення та функціонування технічних систем прямують до нуля, хоча працездатність їх не зменшується; 2) «нерівномірність розвитку частин» (чим складніша технічна система, тим нерівномірнішим є її розвиток); 3) «перехід у надсистему» — вичерпавши можливості розвитку, система включається в надсистему як одна з частин.
Закони динаміки: 1) перехід з макрорівня на мікрорівень; 2) підвищення ступеня вепольності — зростання кількості елементів і зв'язків між ними.
Головна рушійна сила розвитку технічних систем — усунення суперечності між зростаючими потребами суспільства і можливостями сьогоднішніх технічних систем. Діалектика розвитку технічних систем полягає в тому, що в новому об'єкті поєднуються нові та відомі технічні рішення. Так, на початку розвитку металорізальні верстати мали рухи від загального привода — локомобіля за допомогою трансмісійних валів (складність керування, низька продуктивність, висока небезпека). Потім з'явились верстати з індивідуальним приводом від електродвигуна через зубчасті передачі. Тенденція розвитку сучасних верстатів — постачання кожного вузла власним приводом у вигляді, наприклад: крокового електродвигуна, високомоментного двигуна тощо.
Подальший розвиток технічних систем вимагає подолання суперечностей між високою продуктивністю процесу різання й великими витратами часу на виконання холостих рухів і допоміжних операцій. Приводи не забезпечували необхідну точність позиціювання універсальних верстатів під час роботи в автоматичному режимі. При цьому в системах керування для досягнення високої точності використовувалися дискретні сигнали, а у приводах аналогові сигнали не дозволяли одержати достатню точність. Ці суперечності привели до появи нового класу високоточних приводів, які керуються від пристроїв ЧПК (числового програмного керування). Прикладом може бути привод, який уключає кроковий електродвигун, гідравлічний підсилювач, гидродвигун та безлюфтову кулькову гвинтову пару.
Життєвий цикл технічних систем
Для пояснення явищ, що характеризують тривалість функціонування основних елементів процесу виготовлення, виробництва і споживання технічних систем, використовують поняття життєвого циклу, під яким розуміють тривалість існування технічної системи, починаючи з моменту обґрунтування проведення науково-дослідних робіт, пов'язаних з її створенням, і закінчуючи завершенням робіт з утилізації знятої з експлуатації технічної системи .
Тривалість життєвого циклу технічних систем — змінна функція і залежить від чинників двох груп.
До факторів першої групи відносять: — технічні — новизна, складність, надійність, продуктивність і т. д.; — економічні — собівартість, рентабельність, потреба і т. д.; — організаційні — серійність, характер обслуговування, управління і т. д.
Дія факторів другої групи: — перехід на випуск нової продукції, зміна технічних вимог замовника; — поява нових ринків збуту і т. д
«Цикл життя» технічних систем можна поділити на етапи, стадії й операції. Чотирма етапами «циклу життя» технічної системи є створення, переміщення (постачання, монтаж), використання і ліквідація. Технічна система на кожному етапі повинна задовольняти певні вимоги, тобто мати певні властивості. Кількість та тривалість стадій, на які поділяються етапи «життя» технічної системи, залежать від рівня її складності, оригінальності конструкції, способу виробництва й вимог замовника. Залежно від проектно-конструкторської реалізації та її традицій деякі стадії можуть бути визначені різним чином.
«Цикл життя» технічної системи складається з ланцюга фаз: Ф1 — постановка мети і формулювання задачі; Ф2 — розроблення задуму нової технічної системи (інформаційна фаза — образ задуму); ФЗ — проведення цільових досліджень у межах програми НДР; Ф4 — дослідно-конструкторські роботи (ДКР); Ф5 — створення і дослідження дослідного зразка; Ф6 — випуск в економічну сферу; Ф7 — впровадження (підготовка виробництва, виробництво та експлуатація); Ф8 — припинення випуску й експлуатації; Ф9 — знищення (утилізація).
На всіх фазах життєвого циклу виникає безперервне здобуття нових знань і поступове їх утілення не тільки у будові машин, але й у технології, довкіллі, регламентах та в технологічній документації, патентних, наукових публікаціях і т.ін.
Аналіз технічної системи

Аналіз технічної системи — проектна процедура, яка полягає у визначенні властивостей проектованої системи й дослідженні працездатності ТС за її описом. Аналіз передбачає розв'язання задач функціонального проектування за допомогою математичних моделей (ММ) технічної системи на мікро-, макро- та метарівнях.
Процедури аналізу поділяють на процедури одно- і багатоваріантного аналізу (рис.).
Основою функціонального проектування є одноваріантний аналіз технічної системи — визначення вихідних параметрів технічної системи при заданих внутрішніх і зовнішніх параметрах. Геометрична інтерпретація цієї задачі пов'язана з поняттям простору внутрішніх параметрів. Це n-вимірний простір, у якому для кожного із n внутрішніх параметрів хi виділена координатна вісь. При одноваріантному аналізі задається деяка точка в просторі внутрішніх параметрів та необхідно в цій точці визначити значення вихідних параметрів. Подібна задача звичайно передбачає одноразовий розв'язок рівнянь, що становлять MM, що й зумовлює назву цього виду аналізу.
Більшість задач одноваріантного аналізу (моделювання перехідних процесів, статичних режимів, частотних характеристик і т. д.) зводиться до розв'язання систем звичайних диференціальних рівнянь (ОДР), а також систем нелінійних та лінійних алгебраїчних рівнянь (АР).
Задачі розв'язання систем ОДР і АР можуть виникати на різних етапах і рівнях проектування.
Успішне розв'язання задач одноваріантного аналізу створює передумови для постановки і розв'язання задач багатоваріантного аналізу, який полягає в дослідженні властивостей технічної системи в деякій ділянці простору внутрішніх параметрів. Багатоваріантний аналіз дозволяє визначити поведінку об'єкта проектування при зміні його внутрішніх і зовнішніх параметрів. Такий аналіз потребує багаторазового розв'язання систем рівнянь (багаторазового виконання одноваріантного аналізу).
Основними задачами багатоваріантного аналізу є аналіз чутливості й статистичний аналіз. При виборі та розробленні методу чи алгоритму аналізу перш за все встановлють галузь його застосування. Чим ширшу сферу задач і MM, які вважаються допустимими для розв'язання цим методом, тим цей метод універсальніший. У більшості випадків чітке й однозначне форму-лювання обмежень на застосування методу викликає певні труднощі. Ймовірність успішного застосування методу в окресленому колі задач менша від одиниці. Ця ймовірність є кількісною оцінкою важливої властивості методів та алгоритмів, яка називається надійністю.
Відмови у розв'язанні задач можуть проявлятись у розбіжності ітераційного процесу, у перевищенні похибок гранично допустимих значень і т. ін. Причинами відмов можуть бути погана обгрунтованість MM, обмежена область збіжності, обмежена стійкість.
До методів та алгоритмів аналізу, як і до MM, висувають вимоги точності й економічності. Точність характеризується ступенем збіжності точного розв'язку рівнянь заданої моделі та наближеного розв'язку, отриманого за допомогою оцінюваного методу, а економічність — витратами обчислювальних ресурсів на реалізацію методу (алгоритму). Оцінки точності та економічності можуть бути і теоретичними, й експериментальними.
Див. також
Примітки
- Хорошев А. Н. Введение в управление проектированием механических систем: Учебное пособие. — Белгород, 1999. — 372 с. — ISBN 5-217-00016-3
Джерела
- Голубенко А. Л. Теория технических систем: учеб. пособие для вузов / А. Л. Голубенко, А. С. Петров, А. Л. Кашура. — К.: Арістей, 2004. — 239 с. — ISBN 9668458-10-9
- Саламатов Ю. С. Система законов развития техники (Основы теории развития технических систем) Изд. 2-е исправленное и дополненное.
- Хубка В. Теория технических систем. — М.: Мир, 1987. — 202 с.
- Бучинський М. Я., Горик О. В., Чернявський А. М., Яхін С. В. ОСНОВИ ТВОРЕННЯ МАШИН / [За редакцією О. В. Горика, доктора технічних наук, професора, заслуженого працівника народної освіти України]. — Харків: Вид-во «НТМТ», 2017. — 448 с. : 52 іл. ISBN 978-966-2989-39-7
- Кузнєцов Ю. М., Луців І. В., Дубиняк С. А. Теорія технічних систем.- Київ-Тернопіль: 1997. — 310 с.