GPS-сигнали
Супутники Системи глобального позиціонування (GPS) передають мікрохвильові сигнали для того, щоб забезпечити можливість GPS-приймачам на поверхні Землі чи близько неї визначати свої координати, швидкість і час. Сама система GPS управляється Міністерством оборони США (DoD) для військового і загального користування.

GPS-сигнали мають впорядковані сигнали, які використовуються для визначення відстані до супутника, і навігаційні повідомлення. Навігаційні повідомлення містять дані ефемерид, які використовуються для розрахунку позиції кожного супутнику на орбіті, і інформацію про час і статус всього супутникового групування (сузір'я), що називається альманахом.
Для цивільного використання доступні 4 сигнали. У порядку дат введення в дію це: L1 C/A, L2C, L5 і L1C.[1] L1 C/A також носить назву успадкованого сигналу і передається всіма супутниками. Інші сигнали називаються модернізованими сигналами і не передаються усіма супутниками. В додаток існують обмежені сигнали, які теж передаються на широкий загал, але чиє кодування є секретним, створеним для використання лише авторизованими користувачами. Однак деяке лімітоване використання обмежених сигналів може бути здійснене цивільними користувачами без доступу до деталей секретного кодування і підтримується офіційно.[2]
Інтерфейс користувацького сегменту (GPS-приймачів) описується в документації Interface Control Documents (ICD). Формат цивільних сигналів описаний в Interface Specification (IS), що є підрозділом ICD.
Загальні характеристики
Супутники GPS одночасно передають декілька впорядкованих кодів і навігаційних даних з використанням двійкової фазової маніпуляції (BPSK). Використовується лише обмежене число центральних частот; супутники, що використовують однакову частоту, рознесені з використанням різних кодів впорядкування; іншими словами, GPS використовує множинний доступ з кодовим розділенням каналів. Коди впорядкування також називаються англ. chipping codes (взяте із CDMA/DSSS), псевдовипадковий шум і псевдовипадкові бінарні послідовності (спираючись на факт, що вони передбачувані, але статистично нагадують шум).
Деякі супутники передають декілька потоків BPSK на одній частоті в квадратурі, у вигляді квадратурно-амплітудної модуляції. Однак, на відміну від типових систем QAM, де один потік бітів розділений на два потоки з частотою біт в півсимволу для збільшення спектральної ефективності, в GPS-сигналах ін-фазний і квадратурний компоненти модулюються окремими (але функціонально пов'язаними) бітовими потоками.
Супутники мають унікальний серійний номер, що називається номер космічного корабля (space vehicle number) (SVN), який не змінюється увесь час функціонування супутника. Крім того, супутники, що працюють, перераховані за допомогою ідентифікатору космічного корабля (SV ID) і псевдовипадковим числом шуму (pseudorandom noise number) (число ПВШ), який унікальним способом задає коди послідовностей, які використовує супутник. Існує чітка відповідність один до одного між ідентифікаторами SV і числами ПВШ, описаними в специфікації інтерфейсу.[3] На відміну SVN, число SV ID/ПВШ супутника може змінюватися (змінюючи при тому коди впорядкування, які він використовує). В будь-яку точку часу будь-яке число SV ID/ПВШ використовується не більше ніж на одному супутнику. Одне і те саме число SV ID/ПВШ може використовуватися різними супутниками в різні відліки часу, а один супутник може використовувати різні числа SV ID/ПВШ в різний час. Поточні числа SVN і ПВШ для сузір'я супутників GPS можна знайти на ресурсі NAVCEN.
Успадковані GPS-сигнали
Початково архітектура GPS має два коди впорядкування: код грубого супроводу (C/A) , який вільно доступний широкому загалу, і обмежений точний (precision) код (P), зарезервований для військового застосування.
Коди грубого супроводу
Коди C/A — це коди Голда із періодом 1023 чипів, що передаються на 1,023 Мбіт/сек, маючи період в f 1 мс. Вони поєднуються із навігаційним повідомленням, використовуючи виключне або і результуючий потік бітів використовується для модуляції як було описано перед тим. Ці коди лише збігаються, або міцно автокорелюють коли вони майже точно збігаються. Кожен супутник використовує унікальний код ПВШ, який не має високої кореляції з будь-яким іншим ПВШ-кодом супутника. Іншими словами, коди ПВШ в більшій мірі ортогональні один одному.
Коди C/A генеруються шляхом об’єднання, використовуючи ексклюзивні або двобітові потоки, згенеровані з максимальним періодом 10 розрядним регістром зсуву з лінійним зворотнім зв'язком. Різні коди отримуються за допомогою вибіркового сповільнення одного із бітових потоків. Таким чином:

де:
- — код із ПВШ-числом .
- — результат першого РЗЛЗ, генератор поліному, у якого , а початковий стан дорівнює 11111111112.
- — результат першого РЗЛЗ, генератор поліному у якого і початковий стан також дорівнює 11111111112.
- — затримка (на цілу кількість періодів) відносно кожного числа ПВШ ; це позначено в специфікації інтерфейсу GPS.[3]
- — виключне «або».








В аргументах цієї функції є кількість бітів або чипів від початку їх епох, починаючи з 0. Епохою РЗЛЗ є точка їх початкового стану; і для всіх кодів C/A вона починається на початку кожної секунди UTC плюс ціла кількість мілісекунд. Вихід РЗЛЗ із негативними аргументами визначається відповідно до періоду, що містить 1023 чипів (це необхідно забезпечити, оскільки може мати негативний аргумент при використанні вище наведеного рівняння).
Затримка для ПВШ-чисел 34 і 37 є однаковою; тому їх коди C/A ідентичні і не передаються в один і той самий час[4] (це може призвати, що один або обидва таких сигналів не використовуються через взаємну інтерференцію в залежності від відносних рівнів потужності, отриманих на кожному приймачі).
Точний код
P-код також є числом ПВШ; однак кожен код ПВШ P-коду супутника є довжиною в 6,1871 × 1012 біт (6 187 100 000 000 bits, ~720 213 гігабайтів) і повторюється лише раз на тиждень (він передається в 10,23 Мбіт/сек). Украй велика довжина P-коду збільшує його величину кореляції і усуває будь-які неоднозначності діапазону в межах Сонячної системи. Оскільки код довгий і складний, вважалося що приймач не може напряму отримати і синхронізуватися лише з таким сигналом. Очікувалося, що приймач буде спершу отримувати синхронізацію з більш простим кодом C/A і потім, після отримання поточного часу і оціненого положення, синхронізується з P-кодом.
У той час як числа C/A ПВШ є унікальними для кожного супутника, P-код ПВШ є фактично невеликим сегментом великого P-коду приблизно довжиною в 2,35 × 1014 біт (235 000 000 000 000 біт, ~26,716 терабайтів) і кожен супутник повторює передавати призначений йому сегмент великого основного коду.
Щоб запобігти несанціонованому використанню або потенційного втручання в військовий сигнал за допомогою процесу, що називається спуфінг, було прийняти рішення зашифрувати P-код. З цією метою його модулюють за допомогою W-коду, спеціальної послідовності шифрування, що в результаті генерує Y-код. Y-код — це те що супутник передавав від початку, коли модуль анти-спуфінгу було введено у ввімкнений стан. Зашифрований сигнал згадують як P(Y)-код.
Деталі про W-код зберігаються в секреті, але відомо що він застосовується до P-коду на частоті приблизно 500 кГц,[5] що менше за частоту самого P-коду приблизно в 20 разів. Це дозволило деяким компаніям розробити напів-без-кодовий підхід для відслідковування сигналу P(Y), без необхідності знати сам W-код.
Навігаційне повідомлення
| Номер підкадру | Номер слова | Опис |
|---|---|---|
| 1 | 1–2 | Телеметрія і хендовер (передача) |
| 3–10 | Супутниковий годинник, відношення GPS-часу | |
| 2–3 | 1–2 | Телеметрія і хендовер (передача) |
| 3–10 | Ефемериди (точна орбіта супутника) | |
| 4–5 | 1–2 | Телеметрія і хендовер (передача) |
| 3–10 | компонент Альманаху (синопсис супутникової мережі, корекція помилок) |
Крім ПВШ-кодів впорядкування, приймач повинен знати детальну інформацію про позицію кожного супутника в мережі. В GPS ця інформація накладається за допомогою модуляції поверх обох кодів впорядкування (C/A і P(Y)) на швидкості 50 біт/сек і називається навігаційним повідомленням.
Навігаційне повідомлення містить інформацію, яку можна розділити на 3 основні частини:
- дата і час GPS, плюс статус супутників і інформація про його здоров'я.
- Ефемериди: інформація про орбіту, що дозволяє приймачу розрахувати позиції супутника. Кожен супутник передає свої власні ефемериди.
- Дані альманаху: містить інформацію і статус, що мають відношення до всіх супутників; кожен супутник передає дані альманаху для декількох (можливо всіх), в залежності які ПВШ-числа використовуються.
В той час як інформація про ефемериди є дуже детальною і вважається дійсною на більше ніж чотири години, інформація альманаху є більш загальною і є дійсною до 180 днів. Альманах допомагає приймачу визначити які супутники шукати, і як тільки приймач отримує сигнал кожного супутника по черзі, тоді він отримує дані ефемерид від супутника. Розрахунок позиції з використанням будь-якого супутника не можна здійснити доки приймач має точну і повну копію даних ефемерид супутника. Якщо сигнал від супутника втрачається доки отримуються дані ефемерид, приймач має відкинути ці дані і почати знову.
Навігаційне повідомлення складається із кадрів довжиною в 1500 біт. Кожен кадр складається із 5 підкадрів в 300 біт, пронумерованих від 1 до 5. В свою чергу кожен підкадр складається з 10 слів довжиною в 30 біт кожен і потребує 6 секунд на передачу. Кожен підкадр містить GPS-час. Підкадр 1 містить GPS-дату (номер тижня) і інформацію для коригування часу супутника у GPS-час, плюс статус супутника і інформацію про справність. Підкадри 2 і 3 разом містять дані ефемерид супутника, що передаються. Підкадр 4 і 5 містить компоненти альманаху, але кожен кадр містить лише 1/25-у усього альманаху; передавач має прийняти 25 повних кадрів даних для того щоб отримати актуальне повідомлення альманах довжиною 15 000 біт. На цій частоті аби отримати весь альманах від одного супутника необхідно 12,5 хвилин. Кожна з 25 версій кадру 4 і 5 називається сторінкою, і вони пронумеровані від 1 до 25.
Кадри починаються і закінчуються на початку/кінці тижня плюс цілий множник, кратний 30 секундам. На початку/в кінці тижня цикл зміни сторінок повертається на сторінку з номером 1.[6]
Існує 2 типи навігаційних повідомлень: LNAV-L використовується супутниками із ПВШ-числом від 1 до 32 (що називаються нижніми ПВШ-числами) і LNAV-U, що використовується супутниками із ПВШ-числами від 33 до 63 (називаються верхніми ПВШ-числами).[7] Ці 2 типи використовують дуже схожі формати. Підкадри від 1 до 3 є однаковими[8] в той час як підкадри 4 і 5 використовують майже той самий формат. Обидва типи повідомлень містять альманах для всіх супутників, що використовують однаковий тип навігаційного повідомлення, але не містить супутників іншого типу.
Кожен підкадр починається із слова телеметрії (TLM), що дозволяє приймачу розпізнати початок підкадру і визначити момент часу приймача, в який починається навігаційний підкадр. Інше слово це слово передачі або хендоверу (HOW), яке містить GPS-час (точніше час, коли буде переданий перший біт наступного підкадру) і ідентифікує конкретний підкадр в середині цілого фрейму.[9][10]Інші вісім слів підкадру, що зашилися, містять конкретні дані цього підкадру. Кожне слово містить 6 бітів парності, згенеровані за допомогою алгоритму на основі кодів Геммінга, який враховує 24 непарних біти даного кадру і останні 2 біти попереднього слова.
Після того як підкадр було прочитано і інтерпретовано, час, коли був надісланий наступний підкадр, можна розрахувати за допомогою даних про корекцію часу і інформацію про передачу HOW. Приймач знає час приймача коли початок наступного підкадру був отриманий із зареєстрованого слова телеметрії, що дає можливість обрахувати час прибуття, таким чином і псевдовідстань. Потенційно приймач здатен отримувати нові заміри псевдовідстаней на початку кожного підкадру, або кожні 6 секунд.
Час
GPS-час задається із роздільною здатністю в 1,5 секунди в вигляді номера тижня і відліком часу від початку тижня.[11] В нульовій точці (тиждень 0, час від початку тижня 0) задається у вигляді 1980-01-06T00:00Z. Час від початку тижня — це лічильник з можливими значенням від 0 до 403 199, чиє значення задає кількість 1,5-секундних періодів, які відбулися від початку GPS-тижня. Це час таким чином потребує для передачі 19 бітів (219 = 524 288). GPS-час — це безперервна шкала часу, що не містить високосних секунд; тому початок/кінець GPS-тижня може відрізнятися від відповідного дня за UTC на ціле число секунд.
В кожному підкадрі кожне слово передачі (HOW) містить самі значимі 17 бітів відліку часу від початку тижня, що відповідають почату наступного підкадру.[12] Зверніть увагу, що 2 менш значимі біти можуть бути безпечно пропущені, оскільки HOW повторюється в навігаційному повідомленні кожні 6 секунд, що дорівнює роздільній здатності скороченого відліку часу від початку тижня у наслідок. Так само, скорочений відлік часу від початку тижні заміряє інтервал від останнього початку/кінця GPS-тижня до початку наступного кадру в одиницях кратним 6 секундам.
Кожен кадр містить (в підкадрі 1) 10 найменш значимих бітів відповідного номера тижня GPS.[13] Зверніть увагу що кожен кадр повністю знаходиться в межах одного GPS-тижня, оскільки GPS-кадри не переходять межі GPS-тижня.[14] Оскільки скидання на початок відбувається кожні 1024 GPS-тижнів (приблизно кожні 19,6 років; 1024 це 210), приймач, який обраховує поточні календарні дати, повинен розрахувати верхні біти числа тижня або отримати їх із іншого джерела. Одним із можливих методів є збереження поточної дати в пам'яті приймача під час вимкнення, а потім при вмиканні, припустити, що наново розшифроване скорочене число тижня відповідає періоду в 1024 тижнів, що починаються від останньої збереженої дати. Такий метод коректно визначає повний номер тижня якщо приймач ніколи не залишали вимкненим (або без фіксації часу і позиції) більше ніж на 1024 тижня (~19,6 років).
Альманах
Альманах містить дані про наближену орбіту і статусну інформацію кожного супутника в сузір'ї, модель іоносфери, і інформацію аби прив'язати отриманий час GPS до системи Всесвітнього координованого часу (UTC). Кожен кадр містить частину альманаху (в підкадрах 4 і 5) і повний альманах передається кожним супутником в 25 кадрах (що потребує для передачі 12,5 хвилин).[15] Альманах має декілька застосувань. По-перше допомогти отримати супутники при ввімкнені приймача, дозволяючи скласти список видимих супутників на основі збереженої позиції і часу, хоча необхідні ефемериди від кожного супутника для розрахунку позиції використовуючи ці супутники. В ранніх версіях обладнання відсутність альманаху в новому приймачі могло призвести до довгих затримок, щоб забезпечити визначення позиції, оскільки пошук кожного супутника був повільним процесом. Вдосконалення обладнання зробило процес пошуку швидшим, тому відсутність альманаху більше не є проблемою. Друге застосування — це співвідношення отриманого відносного часу від GPS до міжнародного стандарту часу UTC. Нарешті, альманах дозволяє одночастотному приймачу внести корекцію помилки, пов'язаною з затримкою іоносфери використовуючи глобальну модель іоносфери. Корекції не є такими точними, як системи з уточненням, такі як WAAS або двочастотні приймачі. Однак це завжди краще, ніж відсутність корекції, оскільки похибка через іоносферу є найбільшим джерелом похибки для одночастотного GPS-приймача.
Структура підкадрів 4 і 5
|
|
Оновлення даних
Зазвичай дані супутників оновлюються кожні 24 години, із даними, завантаженими на 60 наперед на випадок перешкод в можливості зробити оновлення по графіку. Зазвичай оновлення містять нові ефемериди, із новими альманахами, що завантажуються не так часто. Сегмент управління гарантує що під час нормальних операцій новий альманах буде завантажено що найменше кожні 6 днів.
Супутники передають нові ефемериди кожні дві години. Ефемериди зазвичай дійсні протягом 4 годин, із попередніми чотирма оновленнями кожні 4 години або більше в не нормальних умовах. Час, що необхідний для отримання ефемерид є важливим елементом затримки для першого становлення позиції, оскільки апаратна частина приймачів стає кращою, час для отримання позиції зменшується; однак, необхідно від 18 до 36 секунд для того, щоб отримати дані ефемерид, через низьку частоту передавання даних.
Частотна інформація
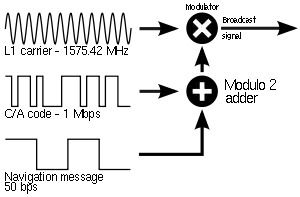
Для того, щоб коди впорядкування і навігаційне повідомлення могли передаватися від супутника до приймача, вони мають бути модульовані у опорний сигнал. У початковій архітектурі GPS використовуються дві частоти; одна в 1575,42 МГц (10,23 МГц × 154), що називається L1; і друга в 1227,60 МГц (10,23 МГц × 120), називається L2.
Код C/A передається на частоті L1 як сигнал в 1.023 МГц з використанням техніки двійкової фазової модуляції (BPSK). Код P(Y) передається на обох частотах (L1 і L2) як сигнал в 10,23 МГц використовуючи ту саму модуляцію BPSK, однак опорний сигнал коду P(Y) знаходиться у квадратурі по відношенню до носія C/A (тобто відрізняється на 90° за фазою).
Окрім додаткового резервування і підвищення стійкості до перешкод, важливою вигодою від наявності двох частот, що передаються від супутників, це здатність визначити напряму за допомогою вимірювання, а таким чином і врахувати, похибку іоносферної затримки сигналу даного супутника. Без такого вимірювання GPS-приймач повинен використовувати загальну модель або отримувати поправки іоносфери із додаткового джерела (такого як Wide Area Augmentation System або WAAS). Вдосконалення технології, що використовується на GPS-супутниках і GPS-приймачах, призвели до того, що затримка іоносфери залишилася єдиним і найбільшим джерелом похибки в передачі сигналу. Приймач, що здатен виконати ці вимірювання, може бути значно точнішим і зазвичай згадується як двочастотний приймач.
Модернізація і додаткові GPS-сигнали
Досягнувши повноти своїх робочих можливостей 17 липня 1995[18] система GPS виконала цілі свого початкового проектування. Однак додатковий розвиток технології і нові вимоги до існуючої системи пробудили нові спроби «модернізувати» систему GPS.
Проект включає в себе нові наземні станції і нові супутники, із додатковими навігаційними сигналами як для військового так і для цивільного використання, і має на меті збільшити точність і доступність для всіх користувачів.
Основні властивості
Модернізовані цивільні GPS-сигнали мають два загальні поліпшення в порівнянні з їх попередніми аналогами: допоміжний сигнал без даних і кодування навігаційного повідомлення із прямим виправленням помилок (FEC).
A допоміжний сигнал без даних — це додатковий сигнал, що іноді називається пілот-сигналом і передається окремо від сигналу даних. Цей сигнал без передачі даних задуманий як такий, що допоможе легше отримати із сигнал із закодованими даними і, після успішного отримання, може використовуватись для отримання сигналу даних. Ця техніка покращує отримання GPS-сигналу і збільшує рівень потужності на кореляторі.
Другим поліпшенням є використання кодування прямої корекції помилок (FEC) в самому навігаційному повідомленні. Завдяки відносно повільній частоті передачі навігаційних даних (зазвичай 50 біт на секунду) невелике втручання може мати потенційно великий внесок.
L2C
Одним із нововведень було додавання нового сигналу для цивільного використання, що передається на частоті відмінній від L1, яка використовується для передачі сигналу грубого/супроводження (C/A). Зрештою, він став позначатися як сигнал L2C, тому що він передається на частоті L2. Оскільки такий сигнал потребує нового обладнання на супутнику, він передається лише на так званих супутниках Block IIR-M, і супутниках подальших розробок. Задачею сигналу L2C є покращення точності навігації, і забезпечує простий сигнал для відстежування, і діє як резервний сигнал у разі локалізованої інтерференції.
На відміну від коду C/A, L2C має два окремих ПВШ-послідовностей кодів для забезпечення інформації про впорядкування; цивільний середній (англ. civil-moderate) код (коротко CM), і цивільний довгий (англ. civil-long) код (коротко CL). Код CM має довжину в 10 230 біт, і повторюється кожні 20 мс. Код CL має довжину в 767 250 біт, повторюючись кожні 1500 мс. Кожен сигнал передається на частоті в 511 500 біт на секунду (біт/сек); однак вони мультиплексовані в один сигнал в 1 023 000 біт/сек.
CM модульований з навігаційним повідомленням CNAV, в той час як CL не має ніяких модульованих даних і називається послідовністю без даних. Довга послідовність без даних забезпечує приблизно на 24 дБ більшу кореляцію (в ~250 разів сильнішу) ніж код L1 C/A.
У порівнянні з C/A-сигналом L2C має на 2,7 дБ краще відновлення даних і на 0,7 дБ краще відстеження носія, хоча потужність передачі менша на 2,3 дБ.
Див. також
Джерела
Специфікація інтерфейсу GPS
- GPS Interface Specification (GPS-IS-200H). 24 вересня 2013. (описує L1, L2C і P).
- GPS Interface Specification (GPS-IS-705D). 24 вересня 2013. (описує L5).
- GPS Interface Specification (GPS-IS-800D). 24 вересня 2013. (описує L1C).
Примітки
- New Civil Signals.
- Codeless/Semi-Codeless GPS Access Commitments.
- GPS-IS-200H, tables 3-Ia, 3-Ib (p. 6–8).
- GPS-IS-200H, § 3.2.1.3, table 3-Ia (p. 4, 7).
- US patent 5576715, Litton, James D.; Graham Russell & Richard K. Woo, "Method and apparatus for digital processing in a global positioning system receiver", issued 1996-11-19, assigned to Leica Geosystems
- GPS-IS-200H, § 20.3.4.1 (p. 63–130).
- GPS-IS-200H, § 6.4.1 (p. 63–64).
- GPS-IS-200H, § 40.3.3 (p. 207).
- NAVSTAR GPS User Equipment Introduction (PDF). US Government. Процитовано 24 липня 2013. Розділ 1.4.2.6.
- "Essentials of Satellite Navigation Compendium". Архів оригіналу за 7 листопад 2014. Процитовано 17 січень 2016.
- GPS-IS-200H, § 6.2.4 (p. 50), § 3.3.4 (p. 41).
- GPS-IS-200H, § 20.3.3.1 (p. 87).
- GPS-IS-200H, § 20.3.3.3.1.1 (p. 90).
- GPS-IS-200H, § 20.3.4.1 (p. 130).
- Interface Specification IS-GPS-200, Revision D: Navstar GPS Space Segment/Navigation User Interfaces (PDF). Navstar GPS Joint Program Office. Архів оригіналу за 8 вересня 2012. Процитовано 24 липня 2013. Page 103.
- GPS-IS-200H, § 20.3.3.5.1 (p. 108–109).
- GPS-IS-200H, § 40.3.3.5.1 (p. 207–208).
- US Coast Guard GPS FAQ
