Сферична система координат
Сферичними координатами називають систему координат для відображення геометричних властивостей фігури в трьох вимірах за допомогою задання трьох координат , де — відстань до початку координат, а і — зенітний і азимутальний кути відповідно.





Поняття зеніту і азимуту
Поняття зеніт і азимут широко використовуються в астрономії. Взагалі зеніт — це напрямок вертикального підйому над довільно вибраним пунктом (точкою спостереження), що належить так званої фундаментальної площини. Як фундаментальна площина в астрономії може бути обрана площина, в якій лежить екватор, або площина, в якій лежить горизонт, або площина екліптики тощо, що породжує різні системи небесних координат. Азимут — кут між довільно вибраним променем фундаментальної площини з початком в точці спостереження та іншим променем цій площині, які мають загальний початок з першим.
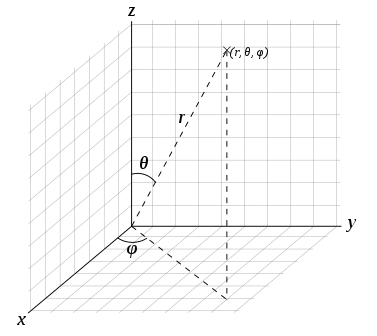
На наведеному малюнку сферичної системи координат, фундаментальна площина — це площина xy. Зеніт — якась віддалена точка, що лежить на осі Z і видима з початку координат. Азимут відраховується від осі X до проєкції радіус-вектора r на площину xy. Це пояснює назви кутів, як і те, що сферична система координат може служити узагальненням (нехай хоча б і наближеним) безлічі різновидів систем небесних координат.
Визначення
Три координати визначені як:
- — відстань від початку координат до заданої точки .
- — кут між віссю і відрізком, що з'єднує початок системи координат і точку .
- — кут між віссю і проєкцією відрізку, що з'єднує початок координат з точкою , на площині .






Кут називається зенітний, або полярний, або нормальний, англ. colatitude, а кут — азимутальний. Кути і не мають значення при , а не має значення при (тобто при або ).




Залежно чи незалежно від стандарту (ISO 31-11), існує і така угода щодо позначень, коли замість зенітного кута , використовується кут між проєкцією радіус-вектора точки r на площину xy і самим радіус-вектором r, що дорівнює — . Він називається кутом підйому і може бути позначений тією ж буквою . В цьому випадку він буде змінюватись в межах .


Тоді кути і не мають значення при , так само як і в першому випадку, а не має значення при , так само як і в попередньому випадку, (але вже при або ).


Перехід до інших систем координат
- Декартова система координат
- Від сферичних до декартових:
- Від декартових до сферичних:
- (тут, звісно, потрібне уточнення для значень поза першим квадрантом; те ж саме для всіх формул з арктангенсом тут і нижче; однак, заміна на відповідну формулу з арккосинусом знімає це питання по відношення до координати ).
- Модуль якобіана перетворення від сферичних до декартових координат:
- Від сферичних до декартових:
- Циліндрична система координат
- Від сферичних до циліндричних:
- Від циліндричних до сферичних:
- Модуль якобіану перетворення від сферичних до циліндричних координат:
- Від сферичних до циліндричних:






Диференціальні характеристики
Сферичні координати є ортогональними, тому метричний тензор набуває діагональної форми:

- Квадрат диференціала довжини дуги:







Інші дорівнюють нулю.
Див. також
Посилання
- Weisstein, Eric W. Сферичні координати(англ.) на сайті Wolfram MathWorld.