Полярна система координат
Полярна система координат — двовимірна система координат, в якій кожна точка на площині визначається двома числами — кутом та відстанню. Полярна система координат особливо корисна у випадках, коли відношення між точками найпростіше зобразити у вигляді відстаней та кутів; в більш поширеній, Декартовій, або прямокутній системі координат, такі відношення можна встановити лише шляхом застосування тригонометричних рівнянь.
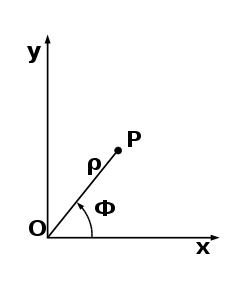
Полярна система координат задається променем, який називають нульовим або полярною віссю. Точка, з якої виходить цей промінь називається початком координат або полюсом. Будь-яка інша точка на площині визначається двома полярними координатами: радіальною та кутовою. Радіальна координата (зазвичай позначається ) відповідає відстані від точки до початку координат. Кутова координата, що також зветься полярним кутом або азимутом (позначається φ) і дорівнює куту між полярною віссю та напрямком на точку. [1]

Визначена таким чином радіальна координата може набувати значення від нуля до нескінченості, а кутова координата змінюється в межах від 0° до 360°. Однак, для зручності діапазон значень азимуту можна розширити за межі повного кута, а також дозволити йому набувати від'ємних значень, що відповідає повороту за годинниковою стрілкою.
Історія

Поняття кута та радіуса були відомі ще в першому тисячолітті до н. е. Грецький астроном Гіппарх (190—120 рр. до н. е.) створив таблицю, в якій для різних кутів наводились довжини хорд. Існують свідчення про застосування ним полярних координат для визначення положення небесних тіл.[2] Архімед в своєму творі Спіралі, описує спіраль Архімеда, функцію, радіус якої залежить від кута. Роботи грецьких дослідників, однак, не розвинулись у цілісне визначення системи координат.
В 9-му столітті перський математик Хабас аль-Хасіб аль-Марвазі застосовував методи картографічних проекцій та сферичної тригонометрії для перетворення полярних координат в іншу систему координат з центром у певній точці на сфері, у цьому випадку, для визначення Кібли — напряму на Мекку.[3] Перський географ Абу Райхан Біруні (973—1048) висунув ідеї, що виглядають як описання полярної системи координат.[4] Він був першим, хто, приблизно 1025 року, описав полярну екві-азимутальну еквідистантну проекцію небесної сфери.[5]
Існують різні версії щодо запровадження полярних координат як формальної системи координат. Повну історію виникнення та дослідження описано в праці професора з Гарварду Джуліан Лоувел Кулідж Походження полярних координат.[6] Грегуар де Сент-Вінсент та Бонавентура Кавальєрі незалежно один від одного прийшли до схожої концепції в середині 17-го століття. Сент-Вінсент описав полярну систему в особистих нотатках 1625 року, надрукувавши свої праці 1647 року, а Кавальєрі надрукував перші свої праці 1635 року, а виправлену версію — 1653 року. Кавельєрі застосовував полярні координати для обчислення площі, обмеженої спіраллю Архімеда. Блез Паскаль згодом використав полярні координати для обчислення довжин параболічних дуг.
У книзі Метод флюксій (написаній 1671 року та надрукованій 1736), сер Ісаак Ньютон досліджував перетворення між полярними координатами, які він позначав як «Сьомий спосіб; Для спіралей» (англ. Seventh Manner; For Spirals), та дев'ятьма іншими системами координат.[7] У статті, опублікованій 1691 року в журналі Acta Eruditorum, Якоб Бернуллі використав систему з точкою на прямій, які він назвав полюсом та полярною віссю, відповідно. Координати задавались як відстань від полюса та кут від полярної осі. Робота Бернуллі була присвячена проблемі пошуку радіусу кривини кривих, визначених в цій системі координат.
Запровадження терміну полярні координати приписують Ґреґоріо Фонтана. У 18-му столітті він входив до лексикону італійських авторів. В англійську мову термін потрапив через переклад трактату Сильвестра Лакруа Диференціальне та інтегральне числення, написаного 1816 року Джорджем Пікоком.[8][9] Для тривимірного простору полярні координати вперше запропонував Алексі Клеро, а Леонард Ейлер був першим, хто розробив відповідну систему.[6]
Графічне представлення
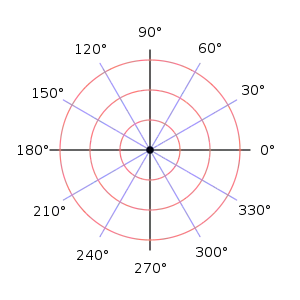
Кожна точка в полярній системі координат може бути визначена двома полярними координатами, що зазвичай мають назву (радіальна координата) та φ (кутова координата, полярний кут, азимут, інколи пишуть θ або t). Координата відповідає відстані до полюса, а координата φ дорівнює куту відкладеному проти годинникового напряму від променя, який відповідає 0° (інколи називається полярною віссю).[1]
Наприклад, точка з координатами (3, 60°) виглядатиме на графіку як точка на промені, який лежить під кутом 60° до полярної осі, на відстані 3 одиниць від полюсу. Точка з координатами (−3, 240°) буде намальована на тому ж місці, оскільки від'ємна відстань зображається в додатну в протилежному напрямі (на 180°).
Однією з важливих особливостей полярної системи координат є те, що одна й та сама точка може бути представлена нескінченною кількістю способів. Це відбувається тому, що для визначення азимута точки потрібно повернути полярну вісь таким чином, щоб він вказував на точку. Але напрям на точку не зміниться, якщо здійснити довільну кількість додаткових повних обертів. У загальному випадку точка (, φ) може бути представлена у вигляді (, φ ± ×360°) або (−, φ ± (2 + 1)180°), де — довільне ціле число.[10]

Для позначення полюсу використовують координати (0, φ). Незалежно від координати φ точка з нульовою відстанню від полюса завжди перебуватиме на ньому.[11] Для отримання однозначних координат точки, зазвичай обмежують значення відстані невід'ємними значеннями ≥ 0 а кут φ — інтервалами [0, 360°) або (−180°, 180°] (у радіанах — [0, 2π) або (−π, π]).[12]
Кути в полярних координатах задаються або в градусах, або в радіанах, при цьому 2π rad = 360°. Вибір, зазвичай, залежить від галузі застосування. У навігації традиційно застосовують градуси, у той час як у деяких галузях фізики, та майже в усіх розділах математики застосовують радіани.[13]
Зв'язок між декартовими та полярними координатами
Пару полярних координат та φ можна перевести в Декартові координати та шляхом застосування тригонометричних функцій синуса та косинуса:




декартові координати та можуть бути перетворені в полярні координати (; φ) таким чином:
- (за теоремою Піфагора).

Для визначення кутової координати φ, слід взяти до уваги два такі міркування:
- Для = 0, φ може бути довільним дійсним числом.
- Для ≠ 0, аби отримати унікальне значення φ, слід обмежитись інтервалом в 2π. Зазвичай, обирають інтервал [0, 2π) або (−π, π].
Для обчислення φ в інтервалі [0, 2π), можна скористатись такими рівняннями ( позначає обернену функцію до тангенсу):


Для обчислення φ в інтервалі (−π, π], можна скористатись такими рівняннями:[14]

Зважаючи на те, що для обчислення полярного кута не досить знати відношення y до x, а ще й додатково знаки одного з цих чисел, багато сучасних мов програмування мають серед своїх функцій окрім функції atan, яка визначає арктангенс числа, ще й додаткову функцію atan2, яка має окремі аргументи для чисельника та знаменника. У мовах програмування, що підтримують необов'язкові аргументи (наприклад, у Common Lisp), функція atan може отримувати значення координати x.
Рівняння кривих у полярних координатах
Завдяки радіальній природі полярної системи координат, деякі криві можуть бути досить просто описані полярним рівнянням, тоді як рівняння в декартовій системі координат були б набагато складнішими. Серед найвідоміших кривих можна назвати полярну розу, спіраль Архімеда, лемніскату, равлик Паскаля та кардіоїду.
Коло
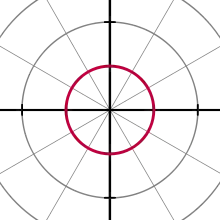
Загальне рівняння кола з центром в () та радіусом має вигляд:



Це рівняння може бути спрощене для окремих випадків, наприклад

є рівнянням, що визначає коло з центром в полюсі та радіусом .[15]
Пряма
Радіальні прямі (ті, що проходять через полюс) визначаються рівнянням
- ,

де θ — кут, на який пряма відхиляється від полярної осі; тобто, θ = arctg де — нахил прямої в Декартовій системі координат. Нерадіальна пряма, що перпендикулярно перетинає радіальну пряму φ = θ в точці (0, θ) визначається рівнянням


Полярна роза
.svg.png.webp)
Полярна роза — відома математична крива, схожа на квітку з пелюстками. Вона може бути визначена простим рівнянням в полярних координатах:

для довільної сталої (включно з 0). Якщо k — ціле число, то це рівняння визначатиме розу з k пелюстками для непарних k, або з 2k пелюстками для парних k. Якщо k — раціональне, але не ціле, графік заданий рівнянням утворить фігуру подібну до рози, але пелюстки будуть перекриватись. Рози з 2, 6, 10, 14 і т. д. пелюстками цим рівнянням визначити неможливо. Змінна a визначає довжину пелюсток.

Спіраль Архімеда
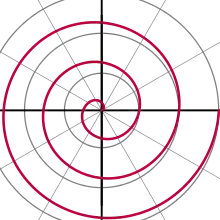
Відома спіраль Архімеда названа на честь її винахідника, давньогрецького математика Архімеда. Цю спіраль можна визначити за допомогою простого полярного рівняння:

Зміни параметру a призводять до повороту спіралі, а параметру b — відстані між витками, яка є константою для конкретної спіралі. Спіраль Архімеда має дві гілки, одну для φ > 0 а іншу для φ < 0. Дві гілки плавно сполучаються в полюсі. Дзеркальне відображення однієї гілки відносно прямої що проходить через кут 90°/270° дасть іншу гілку. Ця крива цікава тим, що була описана в математичній літературі однією з перших, після конічного перетину, й найкраще серед інших визначається саме полярним рівнянням.
Конічні перетини
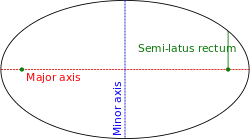
Конічний перетин, один з полюсів якого знаходиться в полюсі, а інший десь на полярній осі (так, що мала піввісь лежить вздовж полярної осі) задається рівнянням:

де e — ексцентриситет, а — фокальний параметр. Якщо e > 1, це рівняння визначає гіперболу; якщо e = 1, то параболу; якщо e < 1, то еліпс. Окремим випадком є e = 0, що визначає коло з радіусом .

Комплексні числа
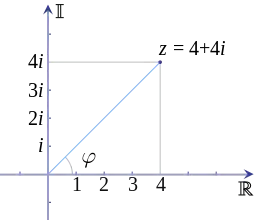
Кожне комплексне число може бути представлене точкою на комплексній площині, і, відповідно, ця точка може визначатись або в декартових координатах (прямокутна або декартова форма), або в полярних координатах (полярна форма). Комплексне число z може бути записане в прямокутній формі як:

де i — уявна одиниця, або в полярній (дивіться формули перетворення між системами координат вище):

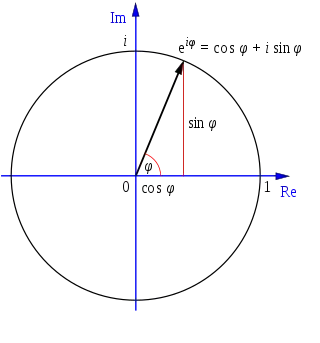
і звідси, як:

де e — число Ейлера. Завдяки формулі Ейлера, обидва представлення еквівалентні.[16] (Слід відзначити, що в цій формулі, подібно до решти формул, які містять піднесення до степеня кутів, кут φ задано в радіанах.)
Для переходу між прямокутним та полярним представленням комплексних чисел, можуть використовуватись наведені вище формули перетворення між системами координат.
Операції множення, ділення та піднесення до степеня з комплексними числами, зазвичай, простіше проводити в полярній формі. Згідно з правилами піднесення до степеня:
- Множення:

- Ділення:

- Піднесення до степеня (формула Муавра):

У математичному аналізі
Операції математичного аналізу теж можна сформулювати, використовуючи полярні координати.[17][18]
Диференційне числення
Справедливі такі формули:


Щоб знайти тангенс кута нахилу дотичної до будь-якої даної точки полярної кривої r(φ) у декартових координатах, виразимо їх через систему рівнянь у параметричному вигляді:


Диференціюючи обидва рівняння по φ отримаємо:


Поділивши ці рівняння (друге на перше), отримаємо шуканий тангенс кута нахилу дотичної у декартовій системі координат у точці (r, r(φ)):

Інтегральне числення
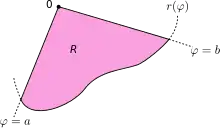
Нехай R — область, яку утворюють полярна крива r(φ) і промені φ = a та φ = b, де 0 < b − a < 2π. Тоді площа цієї області знаходиться визначеним інтегралом:

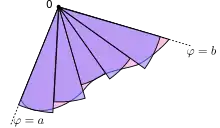
Такий результат можна отримати наступним чином. Спочатку розіб'ємо інтервал [a, b] на довільне число підінтервалів n. Таким чином довжина такого підінтервалу Δφ дорівнює b − a (повна довжина інтервалу) поділена на n (число підінтервалів). Нехай для кожного підінтервалу i = 1, 2, …, n φi — середня точка. Побудуємо сектори з центром у полюсі, радіусами r(φi), центральними кутами Δφ і довжиною дуг . Тому площа кожного такого сектора буде . Звідси, повна площа всіх секторів:



Якщо число підінтервалів n збільшувати, то похибка такого наближеного виразу буде зменшуватися. Поклавши n → ∞, вище отримана сума стане інтегральною. Границя цієї суми при Δφ → 0 визначає вищеописаний інтеграл:

Узагальнення
Використовуючи декартові координати, площа нескінченно малого елементу може бути обчислена як dA = dx dy. Під час переходу до іншої системи координат у багатократних інтегралах, необхідно використовувати визначник Якобі:

Для полярної системи координат, визначник матриці Якобі дорівнює r:

Отже, площу елемента у полярних координатах можна записати так:

Тепер, функція, записана у полярних координатах, може бути інтегрованою таким чином:

Тут область R така сама, як і у попередньому розділі, тобто така, яку утворюють полярна крива r(φ) і промені φ = a та φ = b.
Формула для обчислення площі, яку описано у попередньому розділі, отримана у випадку f=1. Цікавим результатом застосування формули для кратних інтегралів є інтеграл Гауса:

Векторний аналіз
До полярних координат можна застосувати елементи векторного аналізу. Будь-яке векторне поле можна записати в полярній системі координат, використовуючи одиничні вектори


у напрямку , і

- :

- .

Зв'язок між декартовими компонентами поля та і його компонентами в полярній системі координат задається рівняннями:




Відповідним чином у полярній системі координат визначаються оператори векторного аналізу. Наприклад, градієнт скалярного поля записується:

- .

Тривимірне розширення
Полярна система координат поширюється в третій вимір двома системами: циліндричною та сферичною, обидві містять двовимірну полярну систему координат як підмножину. По суті, циліндрична система розширює полярну додаванням ще однієї координати відстані, а сферична — ще однієї кутової координати.
Циліндричні координати
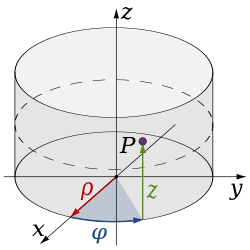
Циліндрична система координат, грубо кажучи, розширює пласку полярну систему додаванням третьої лінійної координати, що має назву висоти і дорівнює висоті точки над нульовою площиною подібно до того, як Декартова система розширюється на випадок 3-х вимірів. Третя координата зазвичай позначається як z, утворюючи трійку координат (ρ, φ, z).
Трійку циліндричних координат можна перевести в Декартову систему такими перетвореннями:

Сферичні координати
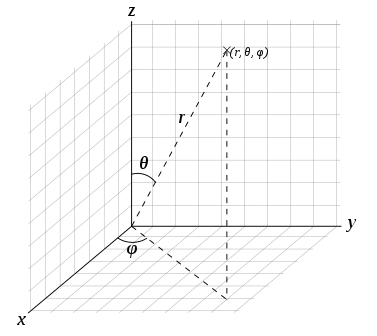
Також полярні координати можна розширити на випадок трьох вимірів шляхом додавання кутової координати θ, що дорівнює куту повертання від вертикальної осі z (називається зенітом або широтою, значення знаходяться в інтервалі від 0 до 180°). Тобто, сферичні координати, це трійка (r, θ, φ), де r — відстань від центру координат, φ — кут від осі x (як і в пласких полярних координатах), θ — широта. Сферична система координат подібна до географічної системи координат для визначення місця на поверхні Землі, де початок координат збігається з центром Землі, широта δ є доповненням θ і дорівнює δ = 90° − θ, а довгота l обчислюється за формулою l = φ − 180°.[19]
Трійку сферичних координат можна перевести в декартову систему такими перетвореннями:

Узагальнення на n вимірів
Полярну систему координат можна розширити на випадок n-мірного простору. Нехай , — координатні вектори n-мірної декартової системи координат. Необхідні координати в n-вимірній полярній системі можна вводити як кут відхилення вектора від координатної осі .




Для переведення узагальнених n-вимірних полярних координат у декартові можна скористатись такими формулами:

Як можна показати, випадок n=2відповідає звичайній полярній системі координат на площині, а n=3 звичайній сферичній системі координат.
Якобіан перетворення полярних координат в Декартові матиме вигляд:

Де n-вимірний елемент об'єму матиме вигляд:

Застосування
Полярна система координат двовимірна і тому може застосовуватись лише в тих випадках, коли місце знаходження точки визначається на площині, або для випадку однорідності властивостей системи в третьому вимірі, наприклад, при розгляді течії в круглій трубі. Найкращим контекстом застосування полярних координат є випадки, що сильно пов'язані з напрямом та відстанню від деякого центру. Наприклад, в наведених вище прикладах видно, що простих рівнянь в полярних координатах достатньо для визначення таких кривих як спіраль Архімеда, рівняння яких в декартовій системі координат набагато складніше. Крім того, багато фізичних систем — таких, що містять тіла, що рухаються навколо центру, або явища, що розповсюджуються з деякого центру — набагато простіше моделювати в полярних координатах. Причиною створення полярної системи координат було дослідження орбітального руху та руху по колу.
Позиціювання та навігація
Полярну систему координат часто застосовують у навігації, оскільки пункт призначення можна задати як відстань та напрям руху від відправної точки. Наприклад, в авіації, для навігації застосовують трохи змінену версію полярних координат. У цій системі, що зазвичай використовується для навігації, промінь 0° називають напрямком 360, а кути відраховуються в напрямку за годинниковою стрілкою. Напрямок 360 відповідає магнітній півночі, а напрями 90, 180, та 270 відповідають магнітним сходу, заходу та півдню.[20] Так, літак, що летить 5 морських миль на схід можна описати як літак, що летить 5 одиниць в напрямі 90 (центр керування польотами назве його найне-зіро).[21]
Моделювання

Системи з радіальною симетрією дуже добре підходять для описання в радіальних координатах, де полюс системи координат збігається з центром симетрії. Як приклад можна навести рівняння току ґрунтових вод у випадку радіально симетричних колодязів. Системи з центральними силами також підходять для моделювання в полярних координатах. До таких систем належать гравітаційні поля, що підпорядковуються закону зворотно-квадратичної залежності, так і системи з точковими джерелами енергії, такі як радіо-антени.
Тривимірне моделювання звуку гучномовців може використовуватися для прогнозування їхньої ефективності. Необхідно зробити декілька діаграм в полярних координатах для широкого діапазону частот, оскільки фронт істотно змінюється залежно від частоти звуку. Полярні діаграми допомагають побачити, що багато гучномовців зі зниженням частоти звуку втрачають направленість.
У полярних координатах також прийнято представляти характеристику направленості мікрофонів, що визначається відношенням чутливості Мα при падінні звукової хвилі під кутом α відносно акустичної осі мікрофона до його осьової чутливості: φ = Mα/M0
Посилання
- Brown, Richard G. (1997). У Andrew M. Gleason. Advanced Mathematics: Precalculus with Discrete Mathematics and Data Analysis. Evanston, Illinois: McDougal Littell. ISBN 0-395-77114-5.
- Friendly, Michael. Milestones in the History of Thematic Cartography, Statistical Graphics, and Data Visualization. Архів оригіналу за 25 вересня 2006. Процитовано 10 вересня 2006.
- T. Koetsier, L. Bergmans (2005). Mathematics and the Divine. Elsevier. с. 169. ISBN 0444503285.
- Джон Дж. О'Коннор та Едмунд Ф. Робертсон. Abu Arrayhan Muhammad ibn Ahmad al-Biruni в архіві MacTutor (англ.)
- David A. King (1996), «Astronomy and Islamic society: Qibla, gnomics and timekeeping», in Roshdi Rashed (ed.), Encyclopedia of the History of Arabic Science, Vol. 1, pp. 128—184 [153], Routledge, London and New York
- Coolidge, Julian (1952). The Origin of Polar Coordinates. American Mathematical Monthly 59: 78–85. doi:10.2307/2307104.
- Boyer, C. B. (1949). Newton as an Originator of Polar Coordinates. American Mathematical Monthly 56: 73–78. doi:10.2307/2306162.
- Miller, Jeff. Earliest Known Uses of Some of the Words of Mathematics. Архів оригіналу за 15 лютого 2012. Процитовано 10 вересня 2006.
- Smith, David Eugene (1925). History of Mathematics, Vol II. Boston: Ginn and Co. с. 324.
- Polar Coordinates and Graphing (PDF). 13 квітня 2006. Архів оригіналу за 15 лютого 2012. Процитовано 22 вересня 2006.
- Lee, Theodore; David Cohen, David Sklar (2005). Precalculus: With Unit-Circle Trigonometry (вид. Fourth Edition). Thomson Brooks/Cole. ISBN 0534402305.
- Stewart, Ian; David Tall (1983). Complex Analysis (the Hitchhiker's Guide to the Plane). Cambridge University Press. ISBN 0521287634.
- Serway, Raymond A.; Jewett, Jr., John W. (2005). Principles of Physics. Brooks/Cole—Thomson Learning. ISBN 0-534-49143-X.
- Torrence, Bruce Follett; Eve Torrence (1999). The Student's Introduction to Mathematica®. Cambridge University Press. ISBN 0521594618.
- Claeys, Johan. Polar coordinates. Архів оригіналу за 15 лютого 2012. Процитовано 25 травня 2006.
- Smith, Julius O. (2003). Euler's Identity. Mathematics of the Discrete Fourier Transform (DFT). W3K Publishing. ISBN 0-9745607-0-7. Процитовано 22 вересня 2006.
- Husch, Lawrence S. Areas Bounded by Polar Curves. Архів оригіналу за 15 лютого 2012. Процитовано 25 листопада 2006.
- Lawrence S. Husch. Tangent Lines to Polar Graphs. Архів оригіналу за 15 лютого 2012. Процитовано 25 листопада 2006.
- Wattenberg, Frank (1997). Spherical Coordinates. Архів оригіналу за 15 лютого 2012. Процитовано 16 вересня 2006.
- Santhi, Sumrit. Aircraft Navigation System. Архів оригіналу за 15 лютого 2012. Процитовано 26 листопада 2006.
- Emergency Procedures (PDF) (pdf). Архів оригіналу за 15 лютого 2012. Процитовано 15 січня 2007.
Посилання
- Програми для малювання графіків, каталог посилань Open Directory Project
|
|
Ця стаття належить до добрих статей української Вікіпедії. |
