Теорія підводного човна
Теорія підводного човна — галузь теорії корабля, що вивчає морехідні якості підводного човна (ПЧ) і його особливості як порівняти з надводним кораблем (судном). Як і загальна теорія корабля, теорія підводного човна включає такі основні розділи: плавучість, остійність, непотоплюваність, ходовість, хитавиця, керованість.
Частина теорії, в якій розглядається стан рівноваги нерухомого щодо води підводного човна, називається статикою підводного човна. У цій частині вивчаються перші три із зазначених вище морехідних якостей (плавучість, остійність, непотоплюваність). Розділ теорії, в якому вивчаються морехідні якості, пов'язані з рухом підводного човна, тобто решта з вище перерахованих якостей, називається динамікою підводного човна (ходкість, хитавиця, керованість…).
Оскільки ПЧ характеризується двома основними положеннями — надводним і підводним, ці морехідні якості, за винятком спуску на воду, також поділяються на надводні та підводні. Вперше основи теорії підводного плавання були опубліковані в 1578 році в праці англійця Вільяма Берна[1][2].
Плавучість
Плавучість — це здатність підводного човна плавати, тобто знаходитися в рівновазі без опори при частковому або повному зануренні у воду. Плавучість є основновною і самою необхідною морехідною якістю підводного човна. При вивченні плавучості (а також остійність і надводної непотоплюваності) розглядаються тільки статичні положення рівноваги підводного човна, нерухомого щодо води.
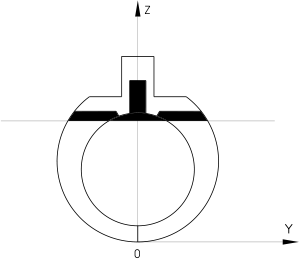
Для визначення положення в просторі окремих елементів підводного човна і точок сил, які додатково діють на нього, використовується жорстко пов'язана з підводним човном прямокутна система координат о, х, у, z, утворена перетином трьох взаємно перпендикулярних площин: діаметральної, мідель-шпангоута й основної.
- Діаметральна площина — поздовжня площина симетрії підводного човна.
- Площина мідель-шпангоута — поперечна площина, що проходить по середині довжини непроникного корпусу підводного човна (тобто по середині між носовою і кормовою перегородками кінцевих цистерн головного баласту) перпендикулярно діаметральній площині.
- Основна площина — поздовжня площина, перпендикулярна діаметральній площині та площині мідедь-шпангоута і проходить через нижні крайні точки теоретичної поверхні корпуса підводного човна (внутрішній поверхні зовнішньої обшивки корпусу).
Лінія перетину діаметральній площині з основною — вісь ох з позитивним напрямком в ніс підводного човна; лінія перетину площини міделю-шпангоута з основною — вісь оу з додатним напрямком на правий борт; лінія перетину площини міделю-шпангоута і діаметральної — вісь oz з позитивним напрямком до палубі надбудови. Таким чином, діаметральна площина є площиною xoz, площина міделю-шпангоута — площиною yoz і основна площина — площиною хоу, а положення будь-якої точки на підводному човні визначається трьома координатами: х, у, z. Згідно з прийнятими додатними напрямками осей визначаються знаки кутів крену і диференту, кренувальних і диферентних моментів. Позитивними вважаються кути диференту на ніс і крену на правий борт, диферентні моменти на ніс і кренящі на правий борт.
На пливучий без руху підводний човен діють дві категорії сил:
- сили тяжіння (ваги);
- поверхневі сили гідростатичного тиску.
Сили ваги окремих частин підводного човна і вантажів що знаходяться на ньому приводяться до однієї рівнодіючої-сили ваги підводного човна Р. Ця сила завжди спрямована вертикально вниз, і під її впливом підводний човен прагне зануритися. Точкою дії цієї сили є центр тяжіння підводного човна, що позначається буквою G. Для забезпечення плавання підводного човна в прямому положенні (без крену) центр його ваги повинен знаходитися завжди в діаметральній площині. Центр ваги підводного човна переміщується і займає нове положення при переміщенні вантажів на підводному човні, а також при прийманні та витрачання їх. При нахилах підводного човна, якщо при цьому не відбувається переміщення вантажів, центр ваги залишається на місці, не змінює свого положення щодо прийнятої системи координат.
Сили гідростатичного тиску діють на занурену частину корпусу підводного човна, спрямовані до поверхні корпусу і за величиною пропорційні глибині занурення. Рівнодіюча цих сил спрямована по вертикалі вгору, по величині вона дорівнює вазі води в об'ємі зануреної частини корпусу підводного човна і позначається γV, де V-об'єм зануреної частини корпусу у м3; γ-питома вага води, тс (тонно-силах)/м3. Під впливом сили γV підводний човен прагне спливти, тому називається вона силою плавучості або силою підтримки. Точкою докладання сили плавучості є центр тяжіння навантаженого обсягу корпусу підводного човна. Ця точка називається центром величини і позначається буквою С. Положення центру величини залежить від величини і форми зануреного об'єму підводного човна. При прямому положенні підводного човна центр величини знаходиться в діаметральній площині, а при нахилах переміщується у бік човна, тобто в тому напрямку, де відбувається прирощення зануреного об'єму.
Положення центру тяжіння і центру величини визначається в прямокутній системі координат oxyz: координатами центра ваги G є xg, yg, zg, а координатами центру величини С — xc, Yc, zc. Центр ваги підводного човна в крейсерському положенні завжди вище центру величини zg > zc, а в підводному положенні центр ваги нижче центру величини zg < zc.
Об'єм V зануреної частини корпусу називається об'ємною водотоннажністю підводного човна і вимірюється в м3. Вага води в об'ємі зануреної частини корпусу D = γV називається ваговою водотоннажністю підводного човна, вимірюється в тонно-силах (тс).
Знання ваги підводного човна, об'ємної водотоннажності, координат центра ваги й центра величини необхідно при вирішенні практичних питань по плавучості, остійності і непотоплюваності підводного човна. підводний човен буде знаходитися в рівновазі тоді, коли діючі на неї сили Р і γV врівноважуються, тобто рівні за величиною, і діють по одній вертикалі. Таким чином, рівновага підводного човна визначається, двома умовами:
- сила плавучості повинна бути рівною вазі підводного човна;
- центр величини і центр ваги підводного човна повинні розташовуватися на одній вертикалі.
Ці умови стосуються як надводного, так і підводного положення підводного човна[2].
Запас плавучості
Запасом плавучості називається весь водонепроникний об'єм підводного човна W, розташований вище діючої ватерлінії. У запас плавучості входить об'єм міцного корпусу, міцної рубки, цистерн головного баласту й інші об'єми, розташовані вище діючої ватерлінії. Не включаються в запас плавучості об'єми проникних частин корпусу — огородження рубки, надбудови, оконечностей. Запас плавучості змінюється зі зміною посадки підводного човна і при повному зануренні стає рівним нулю. Таким чином, запас плавучості визначає вага вантажу, який необхідно прийняти на підводний човен для його повного занурення. Через те, що занурення підводного човна з крейсерського положення в підводне здійснюється заповненням цистерн головного баласту, то в крейсерському положенні запас плавучості повинен бути дорівнювати обсягу цистерн головного баласту. Якщо об'єм цистерн головного баласту не дорівнює запасу плавучості, то підводний човен або не зможе зануритися при Vцгб < W, або після занурення отримує негативну залишкову плавучість при Vцгб > W.
Для забезпечення занурення підводного човна без крену і диференту центр величини непроникного об'єму вище крейсерської ватерлінії (запасу плавучості) і центр величини обсягу цистерн головного баласту повинні лежати на одній вертикалі, тобто хWкр = хцгб, уWкр = уцгб = 0.
Об'єм цистерн головного баласту, розташований вище ватерлінії, одночасно входячий і до складу запасу плавучості, і до складу цистерн головного баласту, називається пасивним запасом плавучості. Пасивний запас плавучості не впливає на посадку підводного човна в крейсерському положенні і з точки зору величини обсягу цистерн головного баласту невигідний, але наявність його має велике значення для забезпечення остійності і непотоплюваності підводного човна.
Велику роль при призначенні величини запасу плавучості грає раціональний поділ міцного корпусу на відсіки поперечними водонепроникними перегородками. При одному і тому ж запасі плавучості збільшення кількості відсіків міцного корпусу забезпечує підводному човні більш високий рівень непотоплюваності. Велике значення має також раціональний розподіл відсіків міцного корпусу і цистерн головного баласту по довжині підводного човна. Найбільш раціональним є розташування відсіків великого обсягу в середній частині підводного човна з поступовим зменшенням їх обсягів до країв.[3][2]
Надводна плавучість
Надводна плавучість ПЧ, аналогічно плавучості надводного корабля, характеризується запасом плавучості. Тобто, відношенням водонепроникних об'ємів вище ватерлінії (ВЛ), до всього водонепроникному об'єму, і виражається у відсотках.
Наприклад, якщо загальний об'єм ПЧ — 3000 м³, а надводної частини — 600 м³, то запас плавучості:
W = 600/3000 * 100 = 20 %'
Те ж відношення можна виразити й у водотоннажностях. Для даного прикладу в дистильованій воді (1 м ³ = 1 т) водотоннажність буде: Dн = 3000 — 600 = 2400 т, а ххводотоннажністьїї її повного об'єму Dп = 3000 т. Тоді: W = (Dн — Dп) / Dп * 100 = (2400 — 3000) / 3000 * 100 = 20 %[2]
Підводна плавучість
Плавучість зануреного ПЧ. Різниця сил підтримання на верхній і нижній частинах корпусу створює залишкову плавучість. Підводна плавучість принципово відрізняється від надводної. Щоб повністю занурити човен у воду, потрібно довести її вага до ваги води, що витісняється її повним об'ємом. Інакше кажучи, погасити запас плавучості до 0 % прийманням додаткового вантажу (баласту), на практиці — забортної води. З точки зору фізики можна також вважати, що човен зменшує свій об'єм, впускаючи навколишній море всередину корпусу. У теорії ПЧ прийнятий перший підхід — баластна вода вважається власністю човна, тобто вантажем. І кажуть, що надводна водотоннажність менше підводної. У нашому прикладі — 2400/3000 т. Як бачимо, запас плавучості можна виразити відношенням надводної та підводної водотоннажності.
Однак, якщо прийняти більше вантажу, ніж важить повністю занурений ПЧ (створити негативну плавучість), вона буде не плавати в підводному положенні, а тонути — продовжувати занурюватися, поки не досягне ґрунту або не зруйнується. Тому життєво важливо, щоб теоретична підводний плавучість була саме нейтральна — 0 %. Для надводного корабля цей межевий стан прирівнюється до втрати плавучості, для ПЧ воно — повсякденна норма.
На плавучість, очевидно, впливає вага зануреного тіла і густина води. Оскільки на практиці ні те, ні інше не залишається постійним (човен має залишкову плавучість), підтримка нейтральної плавучості Пч під водою вимагає постійної корекцій. Вона проводиться відкачуванням/прийманням баласту, що називається виважкою ПЧ, або стабілізацією глибини.
На практиці приймання баласту вимагає витрат часу й енергії. Тому золоте правило надводного корабля: «чим більше запас, тим краще» суперечить технічним вимогам для ПЧ. Конструктивний запас плавучості намагаються обмежувати. Зазвичай він становить у ПЛ 8-30 % (в залежності від проекту), в порівнянні з 50-60 % і більше в надводних кораблів. Винятком є лише ПЧ проекту 941 «Акула» у котрих запас плавучості становить 40 %. Менший запас суперечить вимогам непотоплюваності, більший — швидкості занурення/спливання і обмеженню за конструктивними розмірами.
Основне рівняння плавучості підводного човна, плаваючого в надводному положенні, завжди зберігається при будь-якій зміні її навантаження та густини води. Так, збільшення ваги підводного човна Р призводить до збільшення осадки і зануреного об'єму до величини, при якій забезпечується рівність Р = γV. При зменшенні ваги підводного човна на деяку величину відбувається зменшення і сили плавучості на ту ж величину за рахунок зменшення осадки і зануреного об'єму. Зміна щільності води при постійній вазі підводного човна також компенсується зміною осадки і зануреного об'єму так, що сила плавучості залишається рівною силі ваги підводного човна. Таким чином, в надводному положенні основне рівняння плавучості забезпечується наявністю надводного об'єму корпусу підводного човна, за рахунок якого відбувається збільшення або зменшення зануреного об'єму і відповідно — сили плавучості.
У підводному положенні рівність Р = γV практично не дотримується, оскільки величини, що входять в нього, можуть з різних причин змінюватися, а автоматичної компенсації різниці між Р і γV не відбувається через відсутність надводного об'єму корпусу підводного човна. Тому в підводному положенні завжди має місце залишкова плавучість — різниця між силою плавучості і силою ваги підводного човна
q = γVп — Pп,
де: γVп — сила плавучості в підводному положенні, створювана водонепроникним об'ємом корпусу з урахуванням об'єму цистерн головного баласту, тс;
Pп — вага підводного човна з урахуванням ваги води в цистернах головного баласту, тс.
Залишкова плавучість може бути позитивною при γVп > Pп або негативною при γVп < Pп, і в тому і в іншому випадку вона порушує статичну рівновагу підводного човна. На ходу залишкова плавучість врівноважується гідродинамічними силами, що виникають при русі підводного човна на її корпусі і стернах. При плаванні без ходу або на малому ходу в підводному положенні наявність залишкової плавучості істотно утрудняє управління підводним човном. Тому необхідно знати основні причини появи залишкової плавучості і своєчасно вживати заходів для її зменшення. Виникнення залишкової плавучості відбувається внаслідок зміни ваги підводного човна Pп, її об'ємної водотоннажності Vп і питомої ваги води γ. Найбільш вірогідними причинами, які можуть призвести до зміни ваги підводного човна, є:
- витрачання змінних вантажів; — * поповнення запасів прісної або живильної води при роботі випарної установки на атомних підводних човнах;
- надходження води у відсіки підводного човна при несправностях систем забортної води, а також у разі аварії;
- утворенню повітряних пухирів в цистернах головного баласту при нещільно в системі їх аварійного продування.
Вага підводного човна може змінюватися також унаслідок зміни ваги води в цистернах головного баласту при зміні щільності забортної води. Для підтримки ваги підводного човна постійним з мінімальними відхиленнями проводяться наступні заходи:
- компенсація витрачання змінних вантажів за рахунок приймання забортної води в цистерни допоміжного баласту і спеціального призначення;
- постійне спостереження за герметичністю міцного корпусу і забортних систем, систематичне видалення води, що скупчується в трюмах підводного човна;
- періодичне відкривання клапанів вентиляції цистерн головного баласту для стравлювання із них повітряних бульбашок.
Зміна питомої ваги води відбувається через зміни її температури, солоності і тиску. Вплив тиску на густину води незначний — зі збільшенням глибини занурення на кожні 10 метрів питома вага води зростає в середньому на 0,000 05 тс/м³. Найбільшою мірою щільність води визначається її температурою і солоністю.
Температура води в залежності від широти місця, пори року, глибини моря змінюється в межах від -2 до +30 °С. Найбільшу питому вагу вода має при температурі +4 °С. Зі зміною температури в ту або іншу сторону питома вага води зменшується. В середньому зі зміною температури на 1 °С питома вага води змінюється на 0,00015 тс/м³, що створює залишкову плавучість 0,15 тс на кожні 1000 м³ водотоннажності підводного човна. При переході підводного човна в шар води з більш високою температурою виникає негативна залишкова плавучість, а при переході в шар з більш низькою температурою (але не нижче +4 °С) — позитивна залишкова плавучість. У середніх широтах в холодну пору року температура води в залежності від глибини змінюється незначно. У низьких широтах, а в теплу пору року і в середніх широтах, температура води в міру збільшення глибини знижується. При цьому часто під верхнім, відносно теплим шаром води, по товщині якого температура змінюється слабо, розташовується шар значно більш холодної води. Розмежування цих шарів може бути досить різким, так що в порівняно невеликому по товщині проміжному шарі води спостерігається великий перепад температур, а, отже, і густин. Цей проміжний шар називають шаром температурного стрибка або рідким ґрунтом.
Якщо підводний човен занурюється з невеликою за абсолютною величиною негативною залишкової плавучістю, то при досягненні шару температурного стрибка залишкова плавучість внаслідок збільшення густини води може звернутися в нуль, і підводний човен опиниться в положенні рівноваги подібно надводному положенню. Таким чином, в шарі температурного стрибка підводний човен може плавати без ходу, що може бути використане в цілях скритності та економії енергоресурсів.
Залежно від солоності питома вага води коливається в межах від 1,000 до 1,033 тс/м³. Зміна вагової густини води на 0,001 тс/м³ призводить до появи залишкової плавучості в 1 тс на кожні 1000 м³ водотоннажності підводного човна. Отже, залишкова плавучість підводного човна в залежності від солоності води може змінюватися досить значно.
Солоність морської води залежить від інтенсивності її випаровування, танення і утворення льодів, опадів, процесів перемішування. У деяких районах моря солоність води може різко змінюватися по глибині. Таке явище зустрічається там, де є підводні течії, а також біля берегів в місцях впадіння річок, де великі маси прісної води не відразу перемішуються з навколишнього морською водою. Як і у випадку температурного стрибка при більш-менш різкому розшаруванні по глибині води різної солоності може з'явитися шар води з підвищеною густиною — рідкий ґрунт по солоності[2].
Остійність
Остійність — це здатність підводного човна протидіяти силам, котрі відхиляють її від положення рівноваги, і повертатися у вихідне положення рівноваги після припинення дії цих сил.
Остійність визначає здатність підводного човна зберігати положення рівноваги, що забезпечується плавучістю. Будучи властивістю рівноважного положення підводного човна, остійність проявляється тільки при відхиленні її від положення рівноваги. При цьому опірність підводного човна відхиляючим силам залежить від ряду факторів, таких як величина кута нахилення, площина нахилення, характер діючих на підводний човен сил, положення підводного човна відносно поверхні води. Тому розрізняються і окремо розглядається остійність:
- в залежності від величини кута нахилу — остійність при малих кутах нахилу (початкова остійність) і остійність при великих кутах нахилу;
- в залежності від площини нахилу — поперечна і поздовжня остійність;
- в залежності від характеру діючих на підводний човен сил — статична і динамічна остійність;
- в залежності від положення підводного човна — остійність у підводному положенні і остійність в надводному положенні.[2]
Початкова поперечна остійність
При нахилах підводного човна в поперечній площині остійність розглядається як початкова при кутах крену до 10—15 °. У цих межах опір підводного човна відхиляючим його зусиллям пропорційно куту крену і може бути визначений за допомогою простих лінійних залежностей. При цьому вважається, що відхилення підводного човна від положення рівноваги викликаються зовнішніми силами, які не змінюють ні вага підводного човна, ні положення її центра ваги.
Нахилення підводного човна в цьому випадку будуть равнооб'ємними, тобто такими, при яких об'ємна водотоннажність не змінюється по величині, але змінюється за формою. Рівнооб'ємним нахилам відповідають рівнооб'ємні ватерлінії, що відтинають рівні по величині підводні водонепроникні обсяги корпусу підводного човна. Лінія перетину площини ватерлінії називається віссю нахилу, яка при равнооб'ємних нахилах проходить через центр ваги площини ватерлінії. При поперечних нахилах вона лежить в діаметральній площині.[2]
Початкова поздовжня остійність
Поздовжня остійність підводного човна визначається тими ж залежностями, що і поперечна. Під впливом зовнішнього диферентного моменту Mдиф підводний човен, плаваючий в положенні рівноваги на рівному кілі (ватерлінія Пч), нахиляється в поздовжній площині на кут φ'. Переміщення центру величини внаслідок зміни форми зануреного об'єму забезпечує появу поздовжнього відновлюючого моменту Mφ = P GK, де GK- плече поздовжньої остійності. Точка М є подовжнім метацентром, підвищення поздовжнього метацентра над центром тяжіння — поздовжньою метацентричною висотою Н, а відстань між подовжнім метацентром і центром величини — поздовжнім метацентричним радіусом R.
Поздовжній відновлюваний момент при малих кутах диференту визначається за формулами: Mφ = PH sin φ', Mφ = РН φ, які називаються метацентричними формулами поздовжньої остійності. Ці залежності для поздовжнього відновлюючого моменту справедливі при кутах диференту до 0,5-1,0°, тому поздовжня остійність розглядається як початкова тільки в межах таких кутів диференту.
Поздовжній відновлюваний момент при малих кутах диференту визначається за формулами: Mφ = PH sin φ, Mφ = РН φ, які називаються метацентричними формулами поздовжньої остійності. Ці залежності для поздовжнього відновлюючого моменту справедливі при кутах диференту до 0,5-1,0 °, тому поздовжня остійність розглядається як початкова тільки в межах таких кутів диференту.
Підводний човен в надводному положенні має велику поздовжню остійність, але це не виключає можливості її втрати і перекидання в поздовжній площині. Поздовжня остійність різко зменшується при зменшенні площі діючої ватерлінії, тобто при плаванні з диферентом і при зменшенні запасу плавучості. Тому у випадках значного зменшення площі діючої ватерлінії як при нормальній експлуатації підводного човна (занурення, спливання, створення великих диферентів), так і в аварійній обстановці (при надходженні води всередину міцного корпусу і при заповненні цистерн головного баласту) необхідно завжди уважно контролювати поздовжню остійність, боротися за її збереження та відновлення.[4].
Поперечна остійність при великих кутах крену
Великі нахилення підводного човна в залежності від характеру діючих на нього сил можуть бути повільними, з невеликими кутовими швидкостями, і швидкими, зі значними кутовими швидкостями і прискореннями, що викликає необхідність окремого розгляду статичної остійності підводного човна (при нахилах без помітних швидкостей обертального руху) і динамічної остійності (при нахилах зі значними кутовими швидкостями і прискореннями).
При великих кутах нахилу викладені вище основні положення теорії початкової остійності стають неприйнятними для оцінки стану підводного човна з точки зору остійності. Це пояснюється тим, що при великих нахилах відбувається значна зміна форми зануреного об'єму і площі діючої ватерлінії, внаслідок чого при великих кренах вісь повороту вже не лежить в діаметральній площині, центр величини переміщається не по дузі кола, поперечний метацентр не займає постійне положення в діаметральній площині, а змінює свої координати.[2]
Поздовжня остійність при великих кутах диференту
Наведені вище міркування та висновки про поперечної остійності підводного човна відповідно поширюються і на поздовжню остійність. У зв'язку з тим, що в надводному положенні початкова поздовжня остійність значно більше поперечної, характерною особливістю діаграми поздовжньої статичної остійності є велика крутизна початкової висхідної ділянки. Так, кут максимуму зазвичай не перевищує 15-20 °. Це пояснюється тим, що при великому дифференті різко зменшується площа діючої ватерлінії, момент інерції цієї площі, а значить і відновлюваний момент. У безкінгстонного підводного човна поздовжня остійність зберігається при кутах диференту до 5-7 °.
Слід зазначити великий вплив, який чинить на поздовжню остійність і на характер її діаграми наявність кінгстонів у цистерн головного баласту. При великих нахилах в поздовжній площині бескінгстонного підводного човна її відновлючий момент зменшується на величину диферентуючого моменту від часткового затоплення цистерн головного баласту зануруючих закінчень човна.
У процесі нахилів в поздовжній площині змінюється і запас плавучості підводного човна, який, як правило, зменшується. При великому диференті зменшення поздовжньої остійності та запасу плавучості може стати ще більш інтенсивним внаслідок виходу повітря з цистерн головного баласту виходих з води закінчень човна через шпігати або відкриті кінгстони. Зростання диференту в кінцевому рахунку може призвести до повної втрати підводним човном поздовжньої остійності та запасу плавучості. Особливо важливо враховувати цей зв'язок запасу плавучості і поздовжньої остійності при створенні великих диферентів і при боротьбі за надводну непотоплюваність підводного човна.[2]
Динамічна остійність
Динамічної остойчивостью називається здатність підводного човна витримувати, не перекидаючись, динамічний вплив сил і моментів, що викликають її нахил.
Найбільший кут нахилу, якого досягає підводний човен при впливі на нього динамічного моменту, називається динамічним кутом крену. Досягнувши динамічного кута крену θдин, підводний човен не буде в рівновазі і під дією надлишкового відновлювального моменту і почне прискорено випрямлятися. При відсутності опору води підводний човен став би здійснювати незатухальні коливання біля положення рівноваги при крені θст з амплітудою від 0 до θдін. Але практично під впливом опору води коливання підводного човна швидко згасають і він залишається плавати зі статичним кутом крену θст. Динамічний вплив кренящего моменту завжди небезпечніше статичного, так як призводить до більш значних нахилів підводного човна. Для оцінки безпеки підводного човна при дії різних кренящіх моментів найважливіше значення має визначення динамічного кута крену. По діаграмі динамічної остійності визначаються:
- кут крену при динамічному впливі кренувального моменту;
- граничний динамічний кренящій момент, який може витримати підводний човен;
- граничний кут динамічного способу підводного човна.[2]
Надводна остійність
Принципи надводної остійності ПЧ також аналогічні остійності надводного корабля. Точно так само розрізняють статичну і динамічну остійність. ПЧ на рівному кілі так само знаходиться в положенні нестійкої рівноваги.[5][6] Центр величини (ЦВ, C) розташований під центром ваги (ЦТ, G). При появі крену Θ або диференту Ψ, ЦВ зміщується, сила підтримки γV утворює з силою тяжіння P плече відновлюючого моменту mв.
Особливістю поперечної остійності ПЧ є те, що його корпус, з міркувань міцності, має круглий перетин. Тому, зі збільшенням крену, додаткові об'єми, що входять у воду, незначні (тобто остійність форми не росте). Відновлюючий момент з наростанням крену змінюється мало. Невеликою є і початкова метацентрична висота h.
Як на поперечну, так і на поздовжню надводну остійність ПЧ впливає наявність великої кількості рідких вантажів, котрі, як правило, мають вільні поверхні, — у допоміжних баластних і спеціальних цистернах. Всі вони зменшують запас динамічної остійності. На відміну від надводного корабля, де намагаються вільні поверхні допускати як можна менше, ПЧ по самій своїй будові змушені їх мати. З цієї причини запас динамічної надводної остійності у ПЧ менший, ніж у надводного корабля. Тобто ПЧ, як правило, виходять більш нестійкими на поверхні.[7][2]
Підводна остійність
Підводна остійність ПЧ принципово відрізняється від надводної. Під водою занурений об'єм в цілому постійний, центр величини не зміщується. Тому відновлюючий момент за типом надводного виникнути не може. У підводному положенні потрібно стійка рівновага. Тобто центр ваги (ЦТ) повинен знаходитися нижче центру величини (ЦВ). Тоді будь-який крен або диферент створює пару сил випрямляючих човен. Остійність форми при цьому відсутня, є тільки остійність ваги. Однак будь зсув центру ваги (ЦТ) впливає на положення човна у воді, так звану посадку.
Особливо човен під водою чутливий до подовжніх зусиль, що викликають диферент. Виникаючі при цьому перекидні моменти (mкр), за відсутності остійності форми, часто перевищують випрямляючі, тому небезпечні для човна. Архімедових сил для їх компенсації недостатньо, потрібно штучне втручання. Його здійснюють поздовжнім зсувом вантажу, званим диферентовкою.[8][9][2]
Остійність при зануренні і спливанні
Занурення підводного човна здійснюється прийманням води в цистерни головного баласту, а спливання — її видаленням. І в тому, і в іншому випадку змінюється вага підводного човна, його об'ємна водотоннажність і площа діючої ватерлінії. Остійність при зануренні (спливанні) представляє особливий випадок, при якому основні параметри, що визначають остійність, змінні. Відбувається перехід від нестійкої рівноваги (надводне положення) до стійкого (підводне). Він супроводжується тимчасовим зменшенням остійності. Висота центру величини (Zc) над основною площиною з глибиною зростає, висота центру ваги(Zg) спочатку зменшується, потім зростає, висота метацентру (Zm, не плутати з метацентричною висотою) зростає, потім зменшується, і знову зростає. Їх спільний вплив описується діаграмою плавучості і початкової остійності підводного човна. Дві особливі точки діаграми: I — збіг центру величини і центру ваги. Відновлюваний момент визначається тільки моментом остійності форми. II — занурення під воду міцного корпусу. Метацентр зливається з центром величини, метацентрична висота мінімальна.
При зануренні і спливанні наявні великі ніж коли-небудь (крім випадків пошкодження) вільні поверхні — в цистернах головного баласту. Тому запас динамічної остійності ПЧ мінімальний.[10][2]
Висновки
При відповідному розташуванні механізмів, пристроїв і систем, коли центр ваги в надводному положенні розташовується вище центру величини, підводний човен вважається остійною. При відхиленні човна від положення рівноваги момент від сили плавучості і сили ваги спрямований у бік, протилежний стороні нахилу і по суті є відновлюючим.
У надводному положенні відновлюючий момент складається з позитивного моменту остійності форми і негативного моменту остійності ваги.
Мірою початкової остійності є коефіцієнт остійності моменту кренящого (диференту) на один градус і метацентрична висота. Чисельне значення поперечної метацентричної висоти для різних класів підводних човнів становить 40-80 сантиметрів, а поздовжня співмірна з довжиною корпусу.
У процесі занурення підводного човна остійність форми зменшується до нуля, а остійність ваги стає позитивною величиною. У підводному положенні поздовжня метацентрична висота дорівнює поперечній і визначається відстанню між центром ваги і центром величини.[2]
Непотоплюваність
Непотоплюваність — один з основних елементів живучості. Для підводних човнів, враховуючи специфіку їх конструкції та призначення, вводять поняття надводної та підводної непотоплюваності.
Надводною непотоплюваністю володіють усі підводні човни, однак, рівень забезпечення її може бути різним. Очевидно, що з двох підводних човнів кращою надводною непотоплюваністю буде володіти той, котрий витримує затоплення більшої кількості відсіків і цистерн, а при однотипних пошкодженнях отримає менші зміни осадки та меншу втрату остійності.
Зазначені міркування визначають загальний характер вимог до надводної непотоплюваності, які зазвичай формулюються так: при затопленні заданого числа відсіків та цистерн головного баласту характеристики осадки і остійності пошкодженого підводноого човна не повинні виходити за деякі межі. Інакше кажучи, не повинні перевищувати визначених величин кута крену і диференту, одержувані підводним човном, він повинен зберігати запас плавучості, а також позитивну поперечну і подовжню остійність не нижче визначених значень. Це досягається конструктивними й організаційно-технічними заходами і діями особового складу при боротьбі за непотоплюваність.
Якщо в надводному положенні непотоплюваність підводного човна забезпечується запасом плавучості, то в підводному положенні запас плавучості погашений прийманням води в цистерни головного баласту і боротьба за непотоплюваність приймає зовсім інший характер.
В аварійній ситуації виконання скільки-небудь складних розрахунків непотоплюваності практично є неможливим. Тому оцінку стану підводного човна та вибір заходів боротьби за його непотоплюваність, при фактичній аварії, рекомендується виконувати на базі заздалегідь підготовлених розрахунків.
Результати таких розрахунків для типових варіантів пошкоджень і рекомендованих варіантів спрямлення містяться в таблиці надводної непотоплюваності (ТНН). Вона складається при проектуванні підводного човна і призначена для оцінки його стану після аварії без проведення розрахунків. Таблиця складається з двох частин: лівої — «Аварія» та правої — «Випрямлення». У лівій частині дані елементи плавучості і остійності після тієї чи іншої типової аварії (водотоннажність, залишок запасу плавучості, кут крену і диференту, осадка носом і кормою та ін), в правій частині вказано які цистерни головного баласту слід заповнити для випрямлення підводного човна і наведені елементи її плавучості і остійності після випрямлення.
Як типові варіанти пошкоджень, що включаються в ліву частину таблиці, зазвичай приймаються випадки затоплення одного відсіку міцного корпусу і однієї-двох прилеглих до нього цистерн головного баласту одного борту. Для скорочення обсягу таблиці з кожної пари ушкоджень, що відрізняються тільки затопленням цистерн головного баласту протилежних бортів, становлять лише один, оскільки ніяких змін окрім знаку кута крену це не викликає.
Як заходи з випрямлення аварійного підводного човна в таблиці надводної непотоплюваності рекомендується контрзатопленя непошкоджених цистерн головного баласту. Зважаючи на невеликий запас плавучості підводних човнів можливості спрямлення таким способом є досить обмежені.[11]
Надводна непотоплюваність
При пошкодженнях підводного човна, пов'язаних з надходженням води всередину міцного корпусу в надводному положенні найбільшу небезпеку представляє втрата підводним човном поздовжньої остійності. Незважаючи на те, що в надводному положенні подовжня остійність в сотню разів перевищує поперечну, в першу чергу виникає загроза втрати саме поздовжньої остійності.
При важких ушкодженнях підводний човен втрачає поздовжню остійність раніше, ніж плавучість. Втрата плавучості, як правило, лише наслідок втрати поздовжньої остійності. Всі три наші загиблі в мирний час атомні підводні човни потонули від втрати поздовжньої остійності:
8 квітня 1970 року пожежа на К-8 (627 пр.). В результаті пожежі була порушена герметичність міцного корпусу і відсіків, 12.04. К-8 в надводному положенні втратила подовжню остійність і затонула;
3 жовтня 1986 затонула К-219 (667АУ пр.) в результаті втрати запасу плавучості і поздовжньої остійності;
7 квітня 1989 затонула К-278 «Комсомолець» (685 пр.) в результаті втрати запасу плавучості і поздовжньої остійності.
Це пояснюється тим, що при надходженні води у підводний човен:
- збільшується його осадка, отже, зменшується запас плавучості;
- виникає диферент, в результаті чого різко зменшується площа діючої ватерлінії і момент її інерції щодо поперечної осі (поздовжній відновлює момент не здатний протидіяти диферентному моменту, який утворюється при затопленні відсіку і цистерн головного баласту аварійної краю човна).
Загроза втрати поперечної остійності є менш ймовірною, оскільки поява великих кренувальних моментів на підводному човні можливо лише при заповненні майже всіх цистерн головного баласту з одного борту, а зменшення моменту інерції площі діючої ватерлінії щодо поздовжньої осі, характеризуючу поперечну остійність, є відносно невеликим. При пошкодженні корпусу підводного човна його поздовжня остійність зменшується одночасно і через зменшення запасу плавучості і через виникнення диференту[4].
Підводна непотоплюваність
Підводною непотоплюваністю називається здатність підводного човна при надходженні води у відсіки міцного корпусу спливати в остійності в надводне положення або при збереженні ходу продовжувати плавання.
У підводному положенні остійність підводного човна забезпечується тільки остійністю ваги, так як відсутня діюча площа ватерлінії. Поздовжня метацентрична висота зменшується приблизно в 100 разів і стає рівною поперечній метацентричній висоті. Запас плавучості погашений прийманням води в цистерни головного баласту. Тому боротьба за непотоплюваність набуває зовсім іншого характеру.
Сутність боротьби за підводну непотоплюваність полягає:
- в забезпеченні якнайшвидшого спливання на поверхню. А якщо спливання виключається тактичною обстановкою то в утриманні підводного човна в заданому діапазоні глибин, що не перевищує граничну глибину занурення, з подальшим випливанням на глибину гарантованої міцності перебірок аварійного відсіку; -
- в запобіганні руйнування перегородок затоплюваного відсіку і поширенню води в суміжні відсіки з прийняттям заходів до зменшення і повного припинення надходження води.
Різке збільшення глибини занурення і наростання диференту можуть бути викликані надходженням води в відсік, заклинюванням кормових горизонтальних стерн або причинами випадкового характеру. При надходженні води в відсік, або при заклинюванні кормових горизонтальних стерн на занурення, швидкість занурення підводного човна під дією топлячих сил може досягати 10-20 м/с. До випадкових причин, через які підводний човен може зануритися на глибину, що перевищує робочу, можна віднести невміле управління горизонтальними стернами на великих швидкостях ходу, мимовільне заповнення цистерн допоміжного баласту, ракетних шахт і контейнерів, торпедних апаратів. Тому основне завдання полягає в тому, щоб за допомогою наявних засобів утримати підводний човен від провалу в глибину, більшу граничної, а потім вивести його на поверхню або на безпечну глибину в балансувальному режимі руху. У цьому полягає сенс підводної непотоплюваності.
Забезпечення підводної непотоплюваності має певну складність, бо:
- в підводному положенні відсутній запас плавучості, що призводить, при надходженні води в будь-який з відсіків, до виникнення негативної залишкової плавучості і наростання диференту;
- із збільшенням глибини занурення збільшуються гідродинамічний напір, а, отже, і швидкість надходження води в відсік через пробоїну;
- із збільшенням глибини занурення зменшується продуктивність водовідливних засобів та збільшується витрата повітря високого тиску (ПВТ) для продування цистерн головного баласту і створення протитиску у відсіках. Метою конструктивного забезпечення непотоплюваності є додавання підводному човну, при його проектуванні і побудові, властивостей і технічних засобів що забезпечують заданий рівень непотоплюваності. При цьому враховуються такі чинники:
- — тиск, на який розраховані міцний корпус і водонепроникні перегородки. Міцність таких перегородок повинна забезпечити їх цілісність, якщо підводний човен, маючи хід рівний 3/4 від максимального на глибині 500 м отримає пробоїну не більше 0,01 м2, своєчасно справить спливання на глибину 100 м до досягнення тиску в аварійному відсіку 104 гПа (10 кгс/см2).; -
- — величину запасу повітря високого тиску (ПВТ), що є засобом продування цистерн головного баласту і створення протитиску в аварійному та суміжному відсіках, яка передбачає:
- одне аварійне продування з робочою глибини,
- спливання підводного човна з ґрунту з затопленим відсіком з глибини, рівній половині граничної,
- трикратне продування всіх цистерн головного баласту при спливанні з перископну глибини в крейсерське положення,
- час продування всіх цистерн головного баласту при спливанні з перископну глибини в крейсерське положення — не більше 90 секунд,
- час продування середньої групи цистерн головного баласту з перископну глибини в позиційне положення — не більше 30 секунд.; -
- — величину запасу повітря високого тиску (ПВТ), що є засобом продування цистерн головного баласту і створення протитиску в аварійному та суміжному відсіках, яка передбачає:
- — швидкодію систем, призначених для ліквідації наслідків аварії (головним чином системи аварійного продування цистерн головного баласту і осушувальної системи (Осушувальна система призначена для видалення за борт води, що потрапила всередину міцного корпусу. Вона складається з трубопроводів, арматури і водовідливних засобів. Сумарна продуктивність водовідливних засобів підводного човна залежить від їх кількості, глибини занурення і умов роботи насосів .); -
- — тримкість корпусу підводного човна (є основним засобом боротьби за підводну непотоплюваність практично незалежно від глибини занурення. При пробоїні в кормових відсіках (як правило, виходять з ладу енергетична установка і лінії валів) підводний човен втрачає хід і тим самим втрачає тримкість корпусу. Таким чином, тримкість корпусу підводного човна в більшій мірі активно використовується при надходженні води в носові відсіки.); -
- — автоматизацію процесу боротьби за непотоплюваність. (Істотно зменшує час запізнювання в ухваленні рішення по боротьбі за живучість і виключає його суб'єктивність. При відсутності автоматизації засоби боротьби за непотоплюваність можуть бути застосовані не раніше, ніж через 25-30с. після початку надходження води у відсік підводного човна, а при наявності засобів автоматизації — через 3,5 с. Зміна кінематичних параметрів підводного човна при аварії відбувається дуже швидко.)
З вище викладеного випливає, що на підводну непотоплюваність впливають наступні фактори:
- глибина, на якій почала надходити вода у відсік, і розміри пробоїни,
- початкова швидкість ходу і резерв потужності енергетичної установки для розвитку максимальної швидкості ходу,
- об'єм і розташування затоплюваних відсіків,
- інтенсивність продування ЦМЛ,
- наявність протиаварійної автоматики,
- допустимі диферент на ділянці спливання. Так, наприклад, ймовірність виживання атомного підводного човна буде рівною 50 % при знаходженні його на глибині 200 м на швидкості ходу перед аварією 15 вузлів при надходженні води через пробоїну площею 0,01 м2, так як ήо / ήпред = 200/400 = 0.5, Vо / Vпр = 15узл/30 вузл = 0.5.[11]
Ходовість

Вивченням морехідних якостей підводного човна, пов'язаних з її рухом у воді, таких як ходовість, керованість і поведінку на хитавиці займається розділ теорії, названий динамікою.
Знання питань динаміки важливі командиру при управлінні маневрами підводного човна як у повсякденній так і в бойовій діяльності. При русі підводний човен вступає в складну взаємодію з навколишнім її водним середовищем. Вивчення цієї взаємодії пов'язано зі значними труднощами і ведеться експериментальними й аналітичними методами.
Ходкість — це здатність підводного човна в заданих умовах плавання розвивати необхідну швидкість ходу при певній витраті потужності двигунів. Ходкость забезпечується енергетичною установкою, перетворюючу енергію палива в механічну енергію двигуна, і рушіями, що перетворюють енергію двигунів в поступальний рух підводного човна.
Ходкість в основному визначається величиною опору води, досконалістю гребних гвинтів (рушіїв) і потужністю головних двигунів. Надводна і підводна ходкість ПЧ дуже відрізняються. Для ПЧ, як для надводного корабля, справедливі залежності опору від швидкості ходу. Опір пропорційно квадрату швидкості:
X = f * V ²
де V — швидкість, f — коефіцієнт пропорційності.
Потрібна потужність пропорційна кубу частоти обертання гвинта (гвинтова характеристика):
Ne = m * w ³
де m — коефіцієнт, w — частота обертання.
Надводна ходкість характеризується наявністю хвильового опору (Xв), опору форми (Xф) і опору тертя (Xт). На повному ходу в надводному положенні хвильовий опір досягає 50—60 % загального. Підводна ходкість відрізняється тим, що хвильовий опір відсутній Xв = 0 (починаючи з глибини, рівній половині довжини човна).
Таким чином, створити корпус, що задовольняє обом режимам, неможливо. Більш того, неможливий і задовільний компроміс. Тому форму корпусу оптимізують на більш характерний режим експлуатації. Історично спостерігаються два періоди. Перший, коли підводний та надводний двигуни були повністю роздільні. ПЧ були в основному дизель-електричними і проводили більшу частину часу в надводному положенні. ПЧ цього часу мали надбудову і легкий корпус з обводами, вподібнюючими човен з надводним кораблем. Надводна швидкість цих ПЧ була, в типовому випадку, більше підводної.
З появою шноркеля (РДП) межа між підводним і надводним двигуном затерається, а з появою атомної енергетики човни отримують єдиний двигун. Надводне положення стає не характерним. Тому форма корпусу повністю оптимізована для підводного ходу. З 1960-х рр. вона близька до ідеальної гідродинамічної — краплеподібна, з відносним подовженням L / B = 6 ÷ 7. Мінімізується опір форми. Основну частку (85—90 %) становить опір тертя. Такі човни здатні розвивати під водою більшу швидкість, ніж на поверхні.[12]
Швидкість підводного човна визначається, головним чином, її енергоозброєністю Е і гідродинамічними якостями корпусу і рушіїв. Ці якості визначаються відношенням коефіцієнта корисної дії гвинта до питомого буксировочного опору і називаються пропульсивними якостями підводного човна. Чим вище пропульсивні якості, тим менша енергоозброєність потрібна для забезпечення заданої швидкості ходу. Корпуси сучасних підводних човнів мають обтічну форму, що забезпечує частку опору форми не більше 6-8 % від повного опору. На повному ходу, в надводному положенні, хвильовий опір досягає 50-60 % від повного. Зі зменшенням швидкості частка хвильового опору різко зменшується. У підводному положенні поблизу поверхні води процес утворення корабельних хвиль і хвильового опору має місце, але інтенсивність його зменшується із збільшенням глибини занурення. На практиці вважається, що хвильовий опір відсутній, якщо глибина занурення більше довжини підводного човна. Для забезпечення мінімального хвильового опору в надводному положенні корпус підводного човна повинен мати достатньо велику й загострену носову частину і розвал шпангоутів вище ватерлінії. Але така форма корпусу є абсолютно нераціональною з точки зору забезпечення мінімального опору на великій глибині. Повітряний опір зазвичай становить 1 % від опору води і в практиці не враховується. Але при сильному вітрі його значення (частка) зростає і чисельно залежить від площі надводної частини корпусу підводного човна і від швидкості вітру.[13]
Хитавиця
Надводна хитавиця
Для ПЧ характерна в основному надводна хитавиця. У надводному положенні до ПЧ застосовні всі міркування, діючі при хитавиці надводного корабля. Хоча човен, як і надводний корабель, має всі 6 ступенів свободи, найбільший вплив на нього чинить бортова і кільова хитавиця. Відмінністю бортової хитавиці ПЧ є велика амплітуда. З досвіду експлуатації, вона може доходити до Θ = 60 °, при хвилюванні 5—6 балів.[14][15]
Підводна хитавиця
Підводна хитавиця ПЧ дещо помітна тільки в приповерхневому шарі. Вона впливає на експлуатацію ПЧ використовуючого висувні пристрої, насамперед РДП (шноркель), і на умови пуску ракет з підводного положення. Таким чином, мова йде про глибини занурення від 10 м (перископна глибина) до 45 м (стартова глибина). Заливаємість головки РДП (шноркеля) помітно впливає на вентиляцію ПЧ і накладає вимоги на обладнання, залежне від припливу повітря. Але для теорії ПЧ хитавиця на перископній глибині подібна з надводною. Починаючи з 1960-х років проводилися дослідження приповерхневої хитавиці ПЧ.[16] Результати котрих зводяться до наступного:
- хитавиця біля поверхні помітно впливає на орієнтацію ракет при виході з води;
- хитавиця на стартовій глибині впливає на орієнтацію ракет при виході з шахт і торпедних апаратів, але незначно;
- починаючи з глибини 100 м, вплив хитавиці відсутній.[15]
Керованість
Керованість — це здатність підводного човна утримувати заданий напрям руху або змінювати його певним чином під дією органів управління. Поряд з плавучістю і остійністю керованість є одним з найважливіших морехідних якостей підводного човна, що визначають можливість його використання за призначенням. Втрата керованості робить підводний човен небоєздатним. Теорія підводного човна розглядає керованість в горизонтальній і вертикальній площинах. У надводному положенні керованість розглядається тільки в горизонтальній площині, в підводному — у горизонтальній і вертикальній площинах.
Керованість об'єднує в собі дві протилежні властивості: стійкість руху і повороткість (або маневреність) за курсом (або по глибині). Здатність підводного човна зберігати параметри руху постійними називається стійкістю, а здатність їх змінювати — маневреністю. Забезпечення найкращої керованості підводного човна являє собою додання йому оптимального поєднання цих двох властивостей.
Стійкість прямолінійного руху підводного човна у горизонтальній площині за умови, що вертикальний кермо знаходиться в середньому положенні і машини працюють на постійних обертах називається автоматичною стійкістю на курсі. Конструктивно підводний човен, як і будь-який інший корабель автоматичної стійкісті не має, тому утримання підводному човні на заданому курсі досягається перекладкою вертикального керма.
Властивості керованості надаються підводному човну при його проектуванні і побудові шляхом вибору відповідної форми корпусу, форми і розмірів опірення, огородження рубки, розташування гребних гвинтів. Забезпечується керованість спеціальними органами управління, якими слугують стерна.
Підводний човен при русі може маневрувати у вертикальній площині, тобто змінювати глибину занурення на постійному курсі, в горизонтальній площині, тобто змінювати курс на постійній глибині, а також здійснювати маневри в просторі, тобто одночасно змінювати і курс, і глибину занурення.[13]
Засоби забезпечення керованості
Для здійснення того чи іншого маневру необхідно певним чином змінити сили і моменти, що діють на підводний човен. Такий силовий вплив на підводний човен може бути здійснено за рахунок зміни швидкості ходу, навантаження та перекладання керма.
Оскільки гідродинамічні сили, що виникають на корпусі, опіренні, стернах підводного човна у великій мірі залежать від швидкості ходу, а швидкість визначається силою тяги, створюваної гребними гвинтами, гребні гвинти є одним із засобів забезпечення керованості підводного човна. У деяких випадках доцільно і навіть необхідно змінювати обороти гвинтів в процесі виконання маневру. Крім того, на двухвальних підводних човнах гребні гвинти можуть служити для управління підводним човном в горизонтальній площині.
Для управління підводним човном можна використовувати і такий засіб, як зміна його навантаження шляхом зміни кількості води в цистернах допоміжного баласту або продуванням (заповненням) цистерн головного баласту. При цьому зміна навантаження за рахунок допоміжного баласту буде достатньо ефективною, для управління підводним човном, тільки на малих швидкостях ходу.
Гребні гвинти і зміна навантаження використовуються при управлінні підводним човном як допоміжні засоби або в аварійній ситуації. Головним та універсальним засобом забезпечення керованості є стерна. Для здійснення маневрів у горизонтальній площині служить вертикальні стерна, а маневри у вертикальній площині забезпечуються горизонтальними стернами. Всі стерна виконуються у вигляді крил з симетричним профілем. Граничні кути перекладки керма в більшості випадків не перевищують 30-35 °. При великих кутах перекладки знижується їх ефективність і збільшується опір. Граничний кут перекладки керма, при якому його розгортається сила набуває найбільше значення, називається критичним кутом перекладки. Крім розглянутих засобів на деяких підводних човнах застосовуються спеціальні підстернюючі пристрої, що забезпечують повороткість в горизонтальній площині.
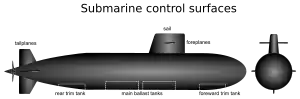
Для забезпечення керованості підводного човна у вертикальній площині на ній зазвичай встановлюється не менше двох пар горизонтальних стерн — кормові горизонтальні стерна і носові (середні, рубочний) горизонтальні стерна. Кормові горизонтальні стерна розміщуються в кормовій частині підводного човна. Причому для найбільш ефективного керування підводним човном на різних (великих і малих) швидкостях ходу встановлюються, як правило, дві пари кормових стерн (великі кормові горизонтальні стерна і малі кормові горизонтальні стерна).
Перекладання носових горизонтальних стерн, крім топлячої чи підйомної сили Yн, створює одночасно диферентний момент Мzн, який визначається величиною сили Yн і плечем, тобто відстанню від центра ваги підводного човна до місця розташування носових горизонтальних стерн. Для зменшення цього моменту, ускладнюючого управління підводним човном (особливо на великих швидкостях ходу), на сучасних підводних човнах встановлюються середні або рубочні горизонтальні стерна, розташовані на значно меншій відстані від центру тяжіння в порівнянні з носовими горизонтальними стернами. Такі стерна можуть використовуватися на будь-якій швидкості ходу, забезпечуючи бездиферентне спливання або занурення, а також компенсацію додаткових сил і моментів, що виникають при використанні зброї. Перекладання рубочних стерн хоч і викликає диферентний момент, але цей момент дуже малий по величині. Слід зазначити також, що перенесення стерн з носової частини ближче до міделю покращує умови роботи гідроакустичних станцій.
При плаванні на великих швидкостях кормові горизонтальні стерна. в силу їх великої ефективності, при перекладці роблять значний вплив на підводний човен, призводять до швидкої зміни траєкторії його руху, що утрудняє управління підводним човном. Тому для управління на великих швидкостях (понад 12 вузлів) на деяких підводних човнах встановлюються малі кормові горизонтальні керма, менші за площею і мають у кілька разів меншу ефективність у порівнянні з великими кормовими горизонтальними стернами. Управління підводним човном у вертикальній площині може здійснюватися при використанні тільки однієї пари стерн або при спільному використанні носових і кормових горизонтальних стерн.[13]
Див. також
Примітки
- Все подлодки мира, nvo.ng.ru, 2006-04-28
- Александр Король Основные сведения о плавучести и остойчивости подводных лодок
- Википедия: Теория подводной лодки, Запас плавучести
- Александр Король Надводная непотопляемость и продольная остойчивость подводной лодки
- Стійка рівновага з остійність не одне і теж. Для визначення рівноваги див: Фізика. 8 клас.
- Philosophiae Naturalis Principia Mathematica Архівовано 28 серпня 2008 у Wayback Machine. = Mathematical Principles of Natural Philosophy By Sir Isaac Newton. Translated by Andrew Motte, First American Edition. New York, 1846. pp.92, 406, 542.
- Википедия: Теория подводной лодки, Надводная остойчивость
- На практиці під диферентовкою розуміють процес, включаючий і приймання/відкачку, і зміщення баласту, з метою досягнення равноваги човна на рівному кілю. Досягнути цього тільки однією дією неможливо.
- Википедия: Теория подводной лодки, Подводная остойчивость
- Википедия: Теория подводной лодки, Остойчивость при погружении (всплытии)
- Александр Король Непотопляемость подводной лодки
- Википедия: Теория подводной лодки, Ходкость
- Александр Король Ходкость и управляемость подводной лодки
- Peter Cremer. U-boat Commander. Naval Institute Press, Annapolis, MD, 1984. ISBN 0-87021-969-3
- Википедия: Теория подводной лодки, Качка
- US Startegic Studies Publications (SSP), ca. 1978, via: A History of Fleet Ballistic Missile Program —