H∞-керування
H на нескінче́нності або — метод теорії керування для синтезу оптимальних контролерів. Метод є оптимізаційним, що має справу із строгим математичним описом передбачуваної поведінки замкненої системи і її стійкості. Метод примітний своєю строгою математичною базою, оптимізаційним характером і застосовністю як до класичного, так і надійного керування.

є нормою в просторі Гарді. «Нескінченність» говорить про виконання мінімаксних умов в частотній області. -норма динамічної системи, дорівнює максимальному підсиленню системи по енергії. У разі MIMO-систем вона дорівнює максимальному сингулярному значенню передавальної функції системи, у разі SISO-систем вона дорівнює максимальному значенню амплітуди її частотної характеристики.

Постановка задачі
Спочатку система повинна бути приведена до стандартного вигляду:
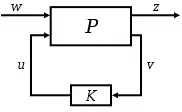
Об'єкт управління P має два входи, дві зовнішні дії w, які включають сигнал завдання і збурення. Контрольована змінна позначена u. Це вектор вихідних сигналів системи, що складається з сигналу похибки z, який треба мінімізувати і зміряна змінна v, яка використовується в контурі керування. v використовується в До для підрахунку змінної u.
Рівняння системи:


Таким чином можливо виразити залежність z від w:

й далі:

Таким чином, метою -керування є синтез такого контролера K, , який мінімізував би -норму системи. Те ж стосується й -керування . Норма на нескінченності матриці визначається як:



де — максимальне сингулярне значення матриці .


