Інерційний вимірювальний пристрій
Інерційний вимірювальний пристрій (ІВП, англ. IMU) це електронний пристрій, який вимірює і видає на вихід значення швидкості тіла, його орієнтації, та гравітаційних сил з якими рухається тіло, а іноді і магнітне поле, що його оточує, використовуючи для цього поєднання акселерометрів, гіроскопів, і іноді магнітометрів. ІВП зазвичай використовуються у маневрових літаках, в тому числі в безпілотних літальних апаратах (БПЛА), і космічних кораблях, включаючи супутники і посадкові модулі. Останні розробки дозволяють виготовляти GPS модулі з підтримкою ІВП. ІВП дозволяє приймачу GPS працювати в умовах де GPS-сигнали не доступні, наприклад, в тунелях, в середині будівель, або при електронних перешкодах.[1] Також існують безпровідні ІВП, які відомі англ. як WIMU.[2][3][4][5]

ІВП є основним компонентом інерційних навігаційних систем, які використовуються в літаках, космічних кораблях, надводних засобах і керованих ракетах серед іншого. В такому вигляді дані зібрані з ІВП давачів дозволяють комп'ютеру відстежувати позицію апарату, використовуючи метод числення координат.
Принцип дії
Інерційний вимірювальний пристрій для вимірювання поточної швидкості прискорення використовує один або декілька акселерометрів, і показує зміни в параметрах обертання, таких як
тангаж, крен і нишпорення використовуючи один, або декілька гіроскопів. Деякі пристрої також мають магнітометр, щоб мати змогу калібрувати дрейф орієнтації.
інерційні навігаційні системи містять декілька ІВП, які мають лінійні і кутові акселерометри (для реєстрації змін позиції); деякі ІВП мають гіроскопи (для встановлення абсолютного кутового напрямку).
Кутові акселерометри вимірюють як апарат обертається в просторі. Зазвичай, використовують принаймні один сенсор для кожної з трьох осей: тангаж (ніс вверх та вниз), нишпорення (ніс вліво чи вправо) і крен (обертання за годинниковою стрілкою або проти годинникової стрілки відносно кабіни).
Лінійні акселерометри вимірюють негравітаційні прискорення[6] апарату. Оскільки він може рухатись відносно трьох осей, встановлюють лінійний акселерометр для кожної з трьох осей.
Комп'ютерна програма постійно підраховує поточну позицію транспортного засобу. Спочатку, для кожного з шести ступенів свободи (x,y,z і θx, θy та θz), вона інтегрує з плином часу виміряні прискорення, із показаннями гравітації, для того, щоб встановити поточну швидкість. Потім вона інтегрує швидкість для встановлення поточної позиції.
Інерційна навігація є досить складною без комп'ютера. Бажання використовувати інерційну навігацію у ракетах Minuteman і програмі Аполлон призвело до ранніх спроб зробити зменшенні мініатюрні комп'ютери.
Інерційні системи навігації зараз зазвичай поєднуються із супутниковими системами навігації через цифрову систему фільтрації. Інерційна система забезпечує дані в коротких проміжках часу, в той час як супутникова система використовується для поправки накопичуваних помилок інерційної системи.
Інерційна система навігації, яка працює біля поверхні Землі має містити в собі регулювання Шулера, для того щоб його платформа продовжувала вказувати в напрямку центру Землі при пересуваннях транспортного засобу з місця на місце.
Конструкція
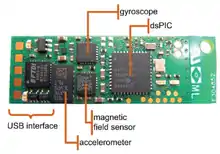
Термін ІВП (англ. IMU) широко використовується маючи на увазі пристрій, якій містить в собі три акселерометри і три гіроскопи, а також може містити додатково три магнітометри. Акселерометри розташовуються так, що їх три осі вимірювання ортогональні одна одній. Вони визначають інерційне прискорення, яке ще називають G-силами.
Три гіроскопи розташовуються таким самим чином, ортогонально один одному, і вимірюють позицію обертання відносно довільно обраної координатної системи.
Все більше і більше виробників додають також три магнітометри в ІВП модулі. Це покращує швидкодію при підрахунку динамічної орієнтації в системах визначення ставлення і напрямку, що зроблені на базі ІВП.
Застосування
Модулі ІВП використовуються в установлених на літаках інерційних навігаційних системах. На сьогоднішній день майже кожен комерційний або військовий надводний засіб має такий пристрій. Більшість літаків також обладнані ІВП.
В навігації
В системах навігації, дані які реєструються з ІВП передають на комп'ютер, який обраховує поточну позицію на основі швидкості і часу.
Наприклад, якщо ІВП встановлено на літаку визначив що літак подорожував на захід протягом однієї години на середній швидкості 500 кілометрів на годину, тоді навігаційний комп'ютер повинен встановити, що літак повинен був пройти 500 кілометрів на захід від своєї початкової позиції. Якщо поєднати це з комп’ютеризованими картографічними системами, система керування може використовувати це для того, щоб повідомити пілоту місце де літак знаходиться географічно, таким же чином як в навігаційній системі на базі даних GPS — але без потреби спілкуватися із зовнішніми компонентами, такими як супутники. Цей метод навігації називається числення координат.
Недоліки
Основним недоліком використання ІВП в навігації є те, що він зазвичай має накопичувану похибку, включаючи похибку Еббе. Оскільки навігаційна система постійно сумує зафіксовані зміни, до попередньо розрахованої позиції (див числення координат), будь-які помилки вимірювань, навіть малі, акумулюються від точки до точки. Це призводить до 'дрейфу', або до постійного зростання різниці між координатами місця, де система думає що знаходиться, і фактичним її місцезнаходженням.
Примітки
- 'GPS system with IMUs tracks first responders'
- http://www.patentstorm.us/patents/5067084/description.html Архівовано 13 грудня 2009 у Wayback Machine. Description of IMU aiding from Roll isolated Gyro
- Inertial Navigation: 40 Years of Evolution - Overview at http://www.imar-navigation.de www.imar-navigation.de
- http://www.mathworks.com/access/helpdesk/help/toolbox/aeroblks/index.html?/access/helpdesk/help/toolbox/aeroblks/threeaxisinertialmeasurementunit.html Three Axis IMU
- http://www.starlino.com/imu_guide.html A Guide To using IMU (Accelerometer and Gyroscope Devices) in Embedded Applications
- Eshbach's Handbook of Engineering Fundamentals By Ovid W. Eshbach, Byron pg 9
