Орієнтація (геометрія)
В геометрії напрямок, кутове положення або положення об'єкта, такого як пряма, площина або тверде тіло є частиною опису того, як воно розташоване в просторі, яке воно займає положення[1]. А саме, це уявне обертання, необхідне для переміщення об'єкта від початкового розташування до його поточного розташування. Обертання може бути недостатньо для досягнення поточного місця розташування. Може знадобитися додати уявне перенесення, який називається місцем знаходження об'єкта (або позицією). Місце знаходження та орієнтація повністю описують, як об'єкт розміщується у просторі. Можна вважати, що вищезгадане уявне обертання і зсув відбуваються в будь-якому порядку, оскільки орієнтація об'єкта не змінюється при його перенесенні, і його місце знаходження не змінюється, коли він обертається.
Теорема обертання Ейлера показує, що в трьох вимірах будь-яка орієнтація може бути досягнута за допомогою одного обертання навколо фіксованої осі. Це дає один загальний спосіб представлення орієнтації за допомогою представлення вісь-кут. Інші широко використовувані методи включають кватерніони повороту, Ейлерові кути, або матриці повороту. До більш спеціалізованого використання відносяться індекси Міллера в кристалографії, простягання і падіння пласта в геології та похил на картах і знаках.
Зазвичай, орієнтація задається щодо системи відліку, як правило, в декартовій системі координат.
Математичні представлення
Три виміри
Взагалі положення і орієнтація в просторі твердого тіла визначаються як положення і орієнтація відносно основної системи відліку або іншої системи відліку, яка фіксується відносно тіла, і, отже, разом з ним паралельно переноситься і обертається (це локальна система відліку або локальна система координат тіла). Для опису орієнтації цієї локальної системи координат необхідні принаймні три незалежних величини. Три інших величини описують положення точки об'єкта.
Всі точки тіла змінюють своє положення під час обертання, окрім тих, що розташовані на осі обертання. Якщо тверде тіло має обертову симетрію, то не всі орієнтації розрізняються, за винятком спостереження, як орієнтація змінюється з часом, починаючи з відомої початкової орієнтації. Наприклад, орієнтацію в просторі прямої, сегменту або вектору можна вказати лише за двома значеннями, наприклад, двома напрямними косинусами. Іншим прикладом є положення точки на землі, яке часто описується за допомогою орієнтації прямої, що з'єднує точку з центром Землі, виміряної за допомогою двох кутів довготи і широти. Аналогічно, орієнтація площини може бути описана двома значеннями, наприклад, можна вказати орієнтацію нормалі прямої до площини, або за допомогою кутів удару і падіння.
Подальші деталі щодо математичних методів представлення орієнтації твердих тіл і площин у трьох вимірах наведені в наступних розділах.
Два виміри
У двох вимірах орієнтація будь-якого об'єкта (пряма, вектор або плоска фігура) задається єдиним значенням: це кут, на який він повернувся. Існує лише один ступінь свободи і лише одна фіксована точка, відносно якої відбувається обертання.
Тверде тіло в трьох вимірах
Існує декілька методів опису орієнтації твердого тіла у тривимірному просторі. Вони наведені у наступних розділах.
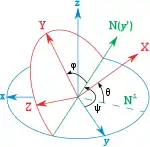
Кути Ейлера
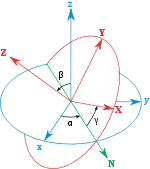
Перша спроба описати орієнтацію належить Леонарду Ейлеру. Він уявляв собі три системи відліку, які обертаються одна навколо іншої, і зрозумів, що, якщо почати з фіксованої системи відліку, виконати три повороти, то можна отримати будь-яку систему координат у просторі (використовується два обертання для фіксації вертикальної осі та ще одне обертання фіксує дві осі, що залишились). Значення, які відповідають кутам цих трьох поворотів називаються кутами Ейлера.
Кути Тайт-Брайана
Це три кути, також відомі як крен, рискання й тангаж, кути навігації і кути Кардана. Математично вони складають множину з шести можливостей, що входять до дванадцяти можливих наборів кутів Ейлера. У аерокосмічній техніці їх зазвичай називають кутами Ейлера.
Вектор орієнтації
Ейлер також зрозумів, що композиція двох обертів еквівалентна одному повороту навколо відмінної від них фіксованої осі (див. теорема обертання Ейлера). Тому композиція руху, утвореного за допомогою перших трьох кутів повинна бути рівною лише одному обертанню навколо осі, розрахунок якої був складним, поки не використовувався матричний запис.
На основі цього факту він запровадив спосіб опису будь-якого обертання за допомогою вектора. Сам вектор належав осі обертання, а його модуль дорівнював значенню кута обертання. Отже, будь-яка орієнтація може бути представлена вектором обертання (також званим вектором Ейлера), який задає перетворення системи відліку. При використанні для представлення орієнтації, вектор обертання зазвичай називається вектором орієнтації або вектором позиції.
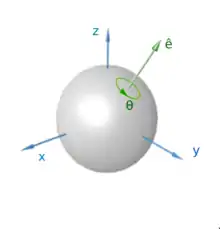
Подібний метод, що називається вісь-кут представлення, описує обертання або орієнтацію за допомогою одиничного вектору, узгодженого з віссю обертання, і окремого значення для позначення кута (див. малюнок).
Матриця орієнтації
З введенням матриць теореми Ейлера були переписані. Повороти стали описувати ортогональними матрицями, які називаються матрицями повороту. При використанні для представлення орієнтації, матриця обертання зазвичай називається матрицею орієнтації.
Вищезгаданий вектор Ейлера є власним вектором матриці повороту (матриця повороту має лише одне дійсне власне значення). Добуток двох матриць повороту — відповідає композиції поворотів. Тому, як і раніше, орієнтація може бути задана як обертання від початкової системи відліку до системи відліку, яку ми хочемо описати.
Конфігураційний простір об'єкта, що не є симетричним в n-вимірному просторі, буде композицією повороту та паралельного перенесення, тобто, — SO(n) × Rn. Орієнтацію можна візуалізувати, якщо приєднати до об'єкта базис складений з дотичних векторів. Напрямок, в якому вказує кожен вектор, визначає його орієнтацію.
Орієнтація, яка задається кватерніоном
Інший спосіб опису поворотів полягає у використанні кватерніонів. Вони еквівалентні матрицям повороту і векторам повороту. якщо порівнювати з векторами повороту, то кватерніони можуть бути більш легко перетворені як в матриці, так і отримані з них. Коли вони використовуються для представлення орієнтацій, кватерніони повороту зазвичай називаються кватерніонами орієнтації або кватерніонами відношення.
Площина в трьох вимірах
Індекси Міллера
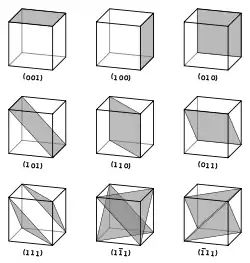
Прив'язка пласкої ґратки — орієнтація прямої нормалі до площини[2], і описує площину індексів Міллера. У тривимірному сімействі площин (ряд паралельних площин) можна позначати індексами Міллера (hkl)[3][4], так що сімейство площин має спільну прив'язку до всіх його складових площин.
Простягання і падіння
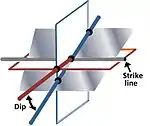
Падіння і простягання — елементи залягання геологічних тіл та структурних поверхонь.
Особливості залягання гірських порід, що описуються в геології, характеризують площинами або прямими, а їх орієнтацію визначають двома кутами.
Ці кути визначають між лінією тренду залягання — занурення (підняття) пласта, пачки тощо і горизонтальною площиною[5].
Простягання пласта — напрям лінії перетину горизонтальної площини з пластом. Сама лінія називається лінією простягання.
Падіння пласта — найбільший нахил пласта, шару, товщі, жили, а також поверхні розриву до горизонтальної площини (кут падіння) і меридіана місцевості (азимут падіння).
Приклади використання
Тверде тіло
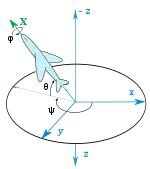
Прив'язкою твердого тіла є його орієнтацією, яка відповідає, наприклад, орієнтації площини, закріпленої відносно тіла, щодо нерухомої системи відліку. Прив'язка описується координатами прив'язки, і складається щонайменше з трьох координат[6]. Одна схема орієнтування твердого тіла заснована на обертанні осей тіла; послідовні обертання тричі по осях фіксованої системи відліку тіла, тим самим встановлюються кути Ейлера тіла[7][8]. Інший підхід ґрунтується на кутах крену, рискання й тангажа[9], хоча ці терміни також відносяться до нарощуваних відхилень від номінальної прив'язки.
Див. також
- Система орієнтації космічного приладу
- Поверхня обертання
- Формули поворотів у тривимірному просторі
- Метод тріади
Примітки
- Robert J. Twiss; Eldridge M. Moores (1992). §2.1 The orientation of structures. Structural Geology (вид. 2nd). Macmillan. с. 11. ISBN 0-7167-2252-6. «...the attitude of a plane or a line — that is, its orientation in space — is fundamental to the description of structures.»
- William Anthony Granville (1904). §178 Normal line to a surface. Elements of the Differential and Integral Calculus. Ginn & Company. с. 275.
- Augustus Edward Hough Love (1892). A Treatise on the Mathematical Theory of Elasticity 1. Cambridge University Press. с. 79 ff.
- Marcus Frederick Charles Ladd; Rex Alfred Palmer (2003). §2.3 Families of planes and interplanar spacings. Structure Determination by X-Ray Crystallography (вид. 4th). Springer. с. 62 ff. ISBN 0-306-47454-9.
- Stephen Mark Rowland; Ernest M. Duebendorfer; Ilsa M. Schiefelbein (2007). Attitudes of lines and planes. Structural Analysis and Synthesis: A Laboratory Course in Structural Geology (вид. 3rd). Wiley-Blackwell. с. 1 ff. ISBN 1-4051-1652-8.
- Hanspeter Schaub; John L. Junkins (2003). Rigid body kinematics. Analytical Mechanics of Space Systems. American Institute of Aeronautics and Astronautics. с. 71. ISBN 1-56347-563-4.
- Jack B. Kuipers (2002). Figure 4.7: Aircraft Euler angle sequence. Quaternions and Rotation Sequences: A Primer with Applications to Orbits, Aerospace, and Virtual Reality. Princeton University Press. с. 85. ISBN 0-691-10298-8.
- Bong Wie (1998). §5.2 Euler angles. Space Vehicle Dynamics and Control. American Institute of Aeronautics and Astronautics. с. 310. ISBN 1-56347-261-9.
- Lorenzo Sciavicco; Bruno Siciliano (2000). §2.4.2 Roll–pitch–yaw angles. Modelling and Control of Robot Manipulators (вид. 2nd). Springer. с. 32. ISBN 1-85233-221-2.
