Плоский рух
Плоский рух — рух матеріальної точки в межах двовимірної площини. Загалом такий рух можна звести до суперпозиції поступального руху та обертання. Прикладом плоского руху може бути обертання планет навколо Сонця в площині екліптики.
В декартовій системі координат плоский рух описується залежністю від часу двох змінних та . Ці дві залежності задають у параметричній формі траєкторію матеріальної точки.


Полярна система координат
Плоский рух можна розглядати в полярній системі координат.
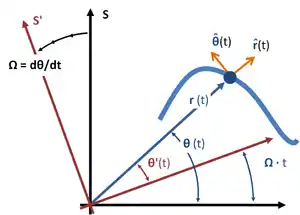
Нехай — це радіус-вектор з координатами , де r і залежать від часу.



Використовуючи одиничні вектори

у напрямку , і

під прямим кутом до , то перша і друга похідні положення будуть:


Похідна задає швидкість віддалення матеріальної точки від початку координат, а похідна визначає кутову швидкість.


Відцентрова та коріолісова складові
Складова другої похідної називається відцентровою, а — коріолісовою. Вираз для другої похідної радіус-вектора, який містить ці члени, схожий на вирази для відцентрової та коріолісової сили, що діють у системах відліку, які обретаються. Слід зауважити, що математичному виразі немає жодного фізичного змісту.[1] Фізика відцентрової та коріолісової сил проявляються у неінерційних системах відліку. Ці складові, які з'являються, коли прискорення виражається у полярних координатах, є математичним наслідком диференцюювання, тобто вони виникають у будь-якому випадку, якщо використовувати полярні координати. Так, ці складові виникають навіть якщо використовувати полярні координати в інерційних системах відліку, де ефект дії коріолісової сили ніколи не проявляється.


Коротаційна система відліку
Для частинки, яка здійснює плоский рух, існує один підхід, який дає фізичне трактування відцентровій та коріолісовій складовій — це поняття коротаційної системи відліку.[2] Щоб визначити таку систему, необхідно обрати систему, у якій визначена відстань r(t) до точки. Осі обертання обираються так, щоб вони були перпендикулярними до площини руху частинки і проходили через її початок. Тоді, у деякий момент часу t швидкість обертання коротаційної системи Ω обирається такою, щоб вона збігалася зі швидкістю обертання частинки dθ/dt навколо цієї осі. Далі, члени у прискоренні в інерційній системі відліку пов'язуються з тими, що у кортаційній системі. Нехай положення частинки в інерційний системі відліку визначається координатами (r(t), θ(t)), і у коротаційній (r(t), θ'(t)). Оскільки коротаційна система обертається з такою самою швидкістю, як і частинка, то dθ'/dt = 0. Уявна відцентрова сила у коротаційній системі mrΩ2 радіально спрямована назовні. Швидкість частинки у коротаційній системі також радіально спрямована назовні, оскільки dθ'/dt = 0, і має величину −2m(dr/dt)Ω, спрямована у напрямку θ. Таким чином, підставивши ці сили до запису другого закону Ньютона, отримаємо:

Крапочки над символом позначають диференціювання по часу. F — це сила, яка протидіє уявним силі Коріоліса та відцентровій силі. Розклавші ці рівняння на складові отримаємо:


які можна порівняти з рівняннями в інерційній системі відліку:


Оскільки коротаційна система у момент часу t обертається зі швидкістю Ω = dθ/dt, то у поєднанні з цим порівнянням ми можемо пояснити члени у прискоренні (помножені на масу частинки), які знайдені в інерційній системі відліку, як від'ємні відцентрова та коріолісова сили. Їх можна розпізнати у миттєвій неінерційній коротаційній системі.
В загальному випадку криволінійного руху частинки (на противагу простому випадку руху по колу) відцентрова та коріолісова сили у пов'язаній з частинкою системі відліку відносяться до уявного кола, до якого дотична швидкість частинки в певний момент часу. Центр цього кола не обов'язково збігається з початком координат.
Посилання
- Кутова швидкість , яка з'являється у виразі для полярних координат, описує частинку, тоді як у класичній ньютоновій механіці Ω — це кутова швидкість системи відліку.
- For the following discussion, see John R Taylor (2005). Classical Mechanics. University Science Books. с. §9.10, pp. 358-359. ISBN 1-891389-22-X.

Джерела
- Яворський Б. М., Детлаф А. А., Лебедев А. К. Довідник з фізики для інженерів та студентів вищих навчальних закладів / Переклад з 8-го переробл. і випр. вид. — Т. : Навчальна книга — Богдан, 2007. — 1040 с. — ISBN 966-692-818-3.
- Сивухин Д. В. Общий курс физики. — Издание 5-е, стереотипное. — М.: Физматлит, 2006. — Т. I. Механика. — 560 с.