Система керування реального часу
Система керування в реальному часі (RCS) є еталонною моделлю архітектури, відповідною для багатьох програмно-інтенсивних проблемних областей управління в реальному часі. RCS - це архітектура еталонної моделі, яка визначає типи функцій, необхідних в інтелектуальній системі керування в реальному часі, і те, як ці функції пов'язані один з одним.
RCS - це не системний проект, і це не специфікація того, як реалізувати конкретні системи. RCS наказує ієрархічну модель управління, засновану на наборі добре обґрунтованих інженерних принципів для організації системної комплексності. Всі вузли керування на всіх рівнях використовують загальну модель вузлів.[1]
Крім того, RCS надає комплексну методологію проектування, інтеграції та тестування систем управління. Архітектори ітеративно розбивають системні завдання та інформацію на більш тонкі, кінцеві підмножини, які є керованими й ефективними. RCS фокусується на інтелектуальному управлінні, яке адаптується до невизначених і неструктурованих робочих середовищ. Основні проблеми — це сприйняття, знання, витрати, навчання, планування і виконання.[1]
Огляд
Архітектура еталонної моделі — це канонічна форма, а не специфікація проектування системи. Архітектура еталонної моделі RCS поєднує в собі планування і керування рухом у реальному часі з високорівневим плануванням завдань, розв'язання задач, моделюванням світу, рекурсивною оцінкою стану, тактильною й візуальною обробкою зображень і акустичним сигнатурним аналізом. Фактично, еволюція концепції RCS була обумовлена прагненням включити кращі властивості та можливості більшості, якщо не всіх, інтелектуальних систем управління, відомих в даний час в літературі, від subsumption до SOAR, від blackboards до об'єктно-орієнтованого програмування.[2]
RCS (real-time control system) - це інтелектуальна агентна архітектура, призначена для забезпечення будь-якого рівня інтелектуальної поведінки, включаючи людський рівень продуктивності. RCS був натхненний теоретичною моделлю мозочка, частини мозку, відповідальної за дрібну моторну координацію і контроль свідомих рухів. Спочатку він був розроблений для сенсорно-інтерактивного цілеспрямованого управління лабораторними маніпуляторами. За три десятиліття він перетворився в архітектуру управління у реальному часі для інтелектуальних верстатів, систем автоматизації виробництва та інтелектуальних автономних транспортних засобів.[3]
RCS застосовується до багатьох проблемних областей, включаючи приклади виробництва та приклади систем транспортних засобів. Системи, засновані на архітектурі RCS, були розроблені й впроваджені в різній мірі для широкого спектра застосувань, які включають завантаження і вивантаження деталей і інструментів на верстатах, управління робочими станціями обробки, виконання роботизованого зняття задирок та фаски, а також управління телероботами космічних станцій, декількома автономними підводними апаратами, безпілотними наземними транспортними засобами, системами автоматизації видобутку вугілля, системами обробки пошти й системами автоматизації експлуатації підводних човнів.[2]
Історія
RCS розвивався через безліч версій протягом ряду років, оскільки розуміння складності й складності інтелектуальної поведінки збільшилася. Перша реалізація була розроблена для сенсорно-інтерактивної робототехніки Барбарою в середині 1970-х років.[4]
RCS-1
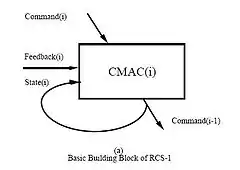
У RCS-1 акцент робився на об'єднанні команд з сенсорним зворотним зв'язком, щоб обчислити правильну реакцію на кожну комбінацію цілей і станів. Додаток мав керувати роботизованою рукою зі структурованою системою світлового зору в завданнях візуального переслідування. На RCS-1 великий вплив зробили біологічні моделі, такі як модель Марра-Альбуса[5] і мозочкова модель арифметичного комп'ютера (CMAC),[6] мозочок.[2]
CMAC стає державною машиною, коли деякі з його виходів подаються безпосередньо на вхід, тому RCS-1 був реалізований як набір державних машин, розташованих в ієрархії рівнів управління. На кожному рівні команда введення ефективно вибирає поведінку, яка управляється зворотним зв'язком в стилі стимул-реакція. CMAC, таким чином, став еталонним зразком будівельного блоку RCS-1, як показано на рисунку.
Ієрархія цих будівельних блоків використовувалася для реалізації ієрархії поведінки, що спостерігається Тінбергеном[7] та іншими. RCS-1 багато в чому схожий з архітектурою підзарядки Брукса,[8] за винятком того, що RCS вибирає поведінку до факту через цілі, виражені в командах, а не після факту через субсумпсії.[уточнити][2]
RCS-2
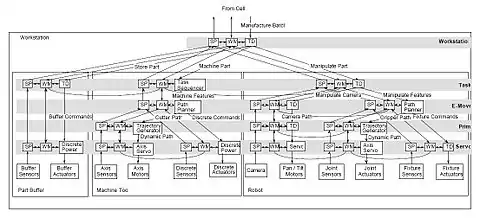
Наступне покоління, RCS-2, було розроблено Барбарою, Фіцджеральдом, Кентом і іншими для управління виробництвом в автоматизованому виробничому дослідному центрі NIST (AMRF) на початку 1980-х рр.[9][10][11] основний будівельний блок RCS-2 показаний на малюнку.
Функція H залишалася виконавцем таблиці станів кінцевого автомата. Новою особливістю CS2 стало включення функції G, що складається з ряду алгоритмів обробки сенсорної, включаючи алгоритми структурованого аналізу світла і великих двійкових об'єктів. RCS-2 був використаний для визначення восьмирівневої ієрархії, що складається з сервоприводу, перетворення координат, E-Move, Завдання, Робочої станції, Стільникової, Магазинної та Об'єктної рівнів управління.
Тільки перші шість рівнів були фактично побудовані. Дві з робочих станцій AMRF повністю реалізували п'ять рівнів RCS-2. Система управління армійським польовим вантажно-розвантажувальним роботом (ФМ)[12] також була реалізована в РКС-2, як і проект армійського напівавтономного наземного транспортного засобу TMAP.[2]
RCS-3
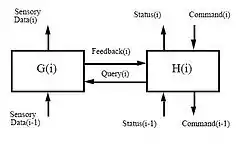
RCS-3 був розроблений для проекту декількох автономних підводних транспортних засобів (MAUV) NBS / DARPA[13] і був адаптований для стандартної моделі NASA / NBS-архітектури системи управління телероботам (NASREM), розробленої для космічної станції Flight Telerobotic Servicer [14] Основний будівельний блок RCS-3 показаний на малюнку.
Основними новими функціями, представленими в RCS-3, є модель світу і інтерфейс оператора. Включення моделі світу забезпечує основу для планування завдань і сенсорної обробки на основі моделей. Це призвело до уточнення модулів декомпозиції задач (TD) таким чином, що кожному з них було призначено завдання, а планувальником і виконавцю для кожної з підсистем було призначене завдання. Це приблизно відповідає трирівневій ієрархії управління Сарідіса.[15][2]
RCS-4
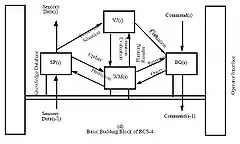
RCS-4 розробляється з 1990-х років підрозділом NIST Robot Systems. Основний будівельний блок показаний на малюнку). Головною новою особливістю RCS-4 є явне представлення системи оцінювальних суджень (VJ). Модулі VJ забезпечують системі управління RCS-4 тип функцій, що надаються біологічному мозку лімбічною системою. Модулі VJ містять процеси, які обчислюють витрати, вигоди й ризики планованих дій, а також визначають цінність об'єктів, матеріалів, території, ситуацій, подій і результатів. Змінні стану значення визначають, які цілі є важливими і які об'єкти або регіони повинні бути охоплені, атаковані, захищені, підтримані або яким-небудь іншим чином залучені. Ціннісні судження, або оцінювальні функції, є невід'ємною частиною будь-якої форми планування або навчання. Застосування оцінювальних суджень до інтелектуальних систем управління розглядав Джордж П'ю.[16] Структура і функція модулів VJ розроблені більш повно, ніж в Albus (1991).[2][17]
RCS-4 також використовує термін генерація поведінки (BG) замість терміна RCS-3 декомпозиція завдання 5 (TD). Мета цієї зміни — підкреслити ступінь автономності прийняття рішень. RCS-4 призначений для вирішення високо автономних завдань в неструктурованих середовищах, де зв'язок з високою пропускною здатністю неможлива, таких як безпілотні літальні апарати, які працюють на полі бою, глибоко під водою або на далеких планетах. Ці програми вимагають автономних оцінювальних суджень і складного сприйняття можливостей в реальному часі. RCS-3 буде використовуватись для менш складних додатків, таких як виробництво, будівництво або телероботи для ближнього космосу або дрібних підводних операцій, де навколишнє середовище більш структурована, а пропускна спроможність зв'язку з людським інтерфейсом менш обмежена. У цих додатках ціннісні судження часто неявно представляються в процесах планування завдань або у вхідних даних людини-оператора.[2]
Методика
На малюнку наведено приклад методики RCS по проектуванню системи управління автономним рухом по дорозі в умовах повсякденного руху, яка складається з шести етапів.[18]
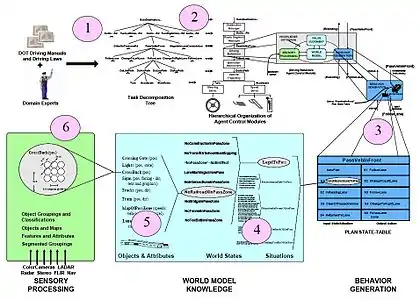
- Крок 1 складається з інтенсивного аналізу знань предметної області з навчальних посібників та експертів з предметної області. Сценарії розробляються і аналізуються для кожного завдання і підзадачі. Результатом цього кроку є структурування процедурних знань в дерево декомпозиції задач з простими завданнями в кожному ешелоні. У кожному ешелоні визначено словник команд (дієслова дій з цільовими станами, параметрами і обмеженнями), що викликає поведінку завдання в кожному ешелоні.[18]
- Крок 2 визначає ієрархічну структуру організаційних підрозділів, які виконуватимуть команди, визначені на кроці 1. Для кожного підрозділу визначено його обов'язки та відповідальність у відповідь на кожну команду. Це аналогічно створенню структури розбивки робіт для проекту розвитку або визначенню організаційної структури для комерційної або військової операції.
- Крок 3 визначає обробку, яка запускається в кожному блоці при отриманні вхідної команди. Для кожної вхідної команди визначається граф станів (або автомат зі змінним або розширеним кінцевим станом), який забезпечує план (або процедуру складання плану) для виконання поставленого завдання. Вхідна команда вибирає (або змушує генеруватися) відповідну таблицю станів, виконання якої генерує серію вихідних команд для одиниць в наступному нижньому ешелоні. Бібліотека таблиць станів містить набір залежних від станів процедурних правил, які визначають умови розгалуження задачі й задають параметри переходу стану і команди виведення.
Результатом кроку 3 є те, що кожна організаційна одиниця має для кожної вхідної команди таблицю станів впорядкованих виробничих правил, кожна з яких підходить для виконання розширеним кінцевим автоматом (FSA). Послідовність вихідних підкоманд, необхідних для виконання вхідної команди, генерується ситуаціями (тобто умовами розгалуження), які змушують FSA переходити від однієї вихідної підкоманди до наступної.[18]
- На кроці 4 кожна з ситуацій, визначених на Кроці 3, аналізується, щоб виявити їх залежності від станів світу і завдання. Цей крок визначає детальні відносини між сутностями, подіями й станами світу, які призводять до виникнення конкретної ситуації.[18]
- На кроці 5 ми ідентифікуємо і називаємо всі об'єкти і сутності разом з їх конкретними ознаками та атрибутами, які мають відношення до виявлення вищевказаних станів і ситуацій у світі.
- На етапі 6 ми використовуємо контекст конкретних дій задачі для встановлення відстаней і, отже, дозволів, при яких відповідні об'єкти й сутності повинні бути виміряні і розпізнані компонентом сенсорної обробки. Це встановлює набір вимог і / або специфікацій для сенсорної системи для підтримки кожної дії підзадачі.
Програмне забезпечення
На основі архітектури еталонної моделі RCS NIST розробила програмну бібліотеку системи управління в реальному часі. Це архів вільного коду C++, Java і Ada кодів, скриптів, інструментів, файлів і документації, розроблених для допомоги програмістам програмного забезпечення, використовуваного в системах керування в реальному часі, особливо використовують архітектуру еталонної моделі для проектування інтелектуальних систем. [19]
Програми
- ISAM Framework - це додаток RCS до виробничого домену.
- Архітектура еталонної моделі 4D-RCS є додатком RCS до домену транспортного засобу та
- Стандартна контрольна модель NASA / NBS для архітектури систем управління Telerobot (NASREM) - це додаток до космічного домену.
Список літератури
- NIST ISD Research areas overview (англ.). 5/12/2003. Процитовано 2 серпня 2009.
- James S. Albus (1992). A Reference Model Architecture for Intelligent Systems Design (англ.). Intelligent Systems Division, Manufacturing Engineering Laboratory, National Institute of Standards and Technology. Архів оригіналу за 16 вересня 2008.
- Jim Albus; Tony Barbera; Craig Schlenoff (2004). RCS: An Intelligent Agent Architecture. Proceedings of 2004 AAAI Conference: Workshop on Intelligent Agent Architectures: Combining the Strengths of Software Engineering & Cognitive Systems (англ.) (San Jose, CA).
- A. J. Barbera; J. S. Albus; M. L. Fitzgerald (March 1979). Hierarchical Control of Robots Using Microcomputers Proceedings of the 9th International Symposium on Industrial Robots (англ.). Washington, DC.
- J.S. Albus (1971). "A Theory of Cerebellar Function". In: Mathematical Biosciences, Vol. 10, pgs. 25–61, 1971
- J.S. Albus (1975). "A New Approach to Manipulator Control : The Cerebellar Model Articulation Controller (CMAC)". In: Transactions ASME, September 1975.
- Nico Tinbergen (1951). The Study of Instinct. Clarendon, Oxford.
- Rodney Brooks (1986). "A Robust Layered Control System for a Mobile Robot". In: IEEE Journal of Robotics and Automation. Vol. RA-2, [1], March, 1986.
- J.A. Simpson, R.J. Hocken, J.S. Albus (1983). "The Automated Manufacturing Research Facility of the National Bureau of Standards". In: Journal of Manufacturing Systems, Vol. 1, No. 1, 1983.
- J.S. Albus, C. McLean, A.J. Barbera, M.L. Fitzgerald (1982). "An Architecture for Real-Time Sensory-Interactive Control of Robots in a Manufacturing Environment". In: 4th IFAC/IFIP Symposium on Information Control Problems in Manufacturing Technology. Gaithersburg, MD, October 1982
- E. W. Kent, J.S. Albus (1984). "Servoed World Models as Interfaces Between Robot Control Systems and Sensory Data". In: Robotica, Vol. 2, No.1, January 1984.
- H.G. McCain, R.D. Kilmer, S. Szabo, A. Abrishamian (1986). "A Hierarchically Controlled Autonomous Robot for Heavy Payload Military Field Applications". In: Proceedings of the International Conference on Intelligent Autonomous Systems. Amsterdam, The Netherlands, December 8–11, 1986.
- J.S. Albus (1988). System Description and Design Architecture for Multiple Autonomous Undersea Vehicles. National Institute of Standards and Technology, Technical Report 37 1251, Gaithersburg, MD, September 1988.
- J.S. Albus, H.G. McCain, R. Lumia (1989). NASA/NBS Standard Reference Model for Telerobot Control System Architecture (NASREM). National Institute of Standards and Technology, Technical Report 1235, Gaithersburg, MD, April 1989.
- George N. Saridis (1985). Foundations of the Theory of Intelligent Controls. IEEE Workshop on Intelligent Control, 1985
- G.E. Pugh, G.L. Lucas, (1980). Applications of Value-Driven Decision Theory to the Control and Coordination of Advanced Tactical Air Control Systems. Decision-Science Applications, Inc., Report No. 218, April 1980
- J.S. Albus (1991). "Outline for a Theory of Intelligence". In: IEEE Trans. on Systems, Man, and Cybernetics. Vol. 21, No. 3, May/June 1991.
- James S. Albus; Anthony J. Barbera (2005). RCS: A Cognitive Architecture for Intelligent Multi-Agent Systems (англ.). Gaithersburg, Maryland 20899: National Institute of Standards and Technology.
- Real-Time Control Systems Library –– Software and Documentation at nist.gov. Accessed Aug 4, 2009.
Зовнішні посилання
- RCS Архітектура систем управління в режимі реального часу Домашня сторінка NIST