Спіріт (марсохід)
«Спі́ріт» (англ. Spirit — дух), також відомий як MER-A (Mars Exploration Rover – A) або MER-2 — марсохід американського космічного агентства NASA. Марсоходи-близнюки Opportunity і Spirit були запущені до Марса в 2003 році в рамках місії Mars Exploration Rover. Планувалося, що апарати пропрацюють на Червоній планеті 90 днів, однак вони протрималися більше п'яти років.

У квітні 2009 року Spirit застряг у піску, втративши друге з шести коліс. Протягом декількох місяців учені намагалися врятувати апарат, для чого вони, зокрема, моделювали ситуацію на точній його копії на Землі. Нічого зробити не вдалося і на початку 2010 року NASA офіційно оголосило про припинення спроб врятувати марсохід.
Цілі місії
Основним завданням місії було вивчення осадових порід, які, як передбачалося, мали утворитися в кратері Гусєва, де колись могло бути озеро або море. Однак класичні осадові породи знайдені не були, в кратері в основному зустрічалися породи вулканічного походження.
Перед місією марсоходу були поставлені наступні наукові цілі[1]:
- Пошук та опис розмаїття гірських порід і ґрунтів, які свідчать про минулу водну активність планети. Зокрема, пошук зразків з вмістом мінералів, які відкладалися за участю води.
- Визначення поширення і складу мінералів, гірських порід і ґрунтів, що оточують місце посадки.
- Визначення того, які геологічні процеси сформували рельєф місцевості і хімічний склад. До цих процесів можуть належати водна ерозія або вітрова ерозія, відкладення опадів, гідротермальні механізми, вулканізм та утворення кратерів.
- Проведення калібрування та перевірки спостережень поверхні, зроблених інструментами Марсіанського розвідувального супутника. Це допоможе визначити точність і ефективність різних інструментів, які використовуються для вивчення марсіанської геології з орбіти.
- Пошук залізовмісних мінералів, виявлення і визначення вмісту певних типів мінералів, що містять воду або були сформовані у воді, таких як залізовмісні карбонати.
- Дослідження мінерального складу і текстури порід і встановлення процесів, які їх утворили.
- Пошук геологічних причин, що сформували ті умови довкілля, які існували, коли на планеті була присутня рідка вода. Оцінка того, наскільки ті умови були сприятливі для життя.
Ракета-носій

«Спіріт» був запущений ракетою-носієм «Дельта II 7925». Це більш потужна ракета-носій, ніж «Дельта-2 7925-H», за допомогою якої був запущений його близнюк — марсохід «Оппортьюніті».
Сімейство ракет-носіїв «Дельта-2» знаходиться в експлуатації вже понад 10 років. З їх допомогою успішно запущені 90 проектів, в тому числі і останні шість місій НАСА на Марс: «Mars Global Surveyor» і «Mars Pathfinder» в 1996 році, «Mars Climate Orbiter» в 1998 році, «Mars Polar Lander» в 1999 році, «Марс Одіссей» в 2001 році і «Фенікс» в 2007 році.
Вироблення енергії
Як і в місії «Mars Pathfinder», електроенергію, необхідну для живлення систем марсоходів, виробляють панелі сонячних батарей. Вони розташовані на «крилах» марсохідів і складаються з окремих осередків, що значно підвищує надійність місії. Вони розроблялися спеціально для «Спіріта» і «Оппортьюніті», для досягнення максимальної площі збирання світла, наскільки це було можливим.
Ще одним нововведенням для марсоходів є додавання потрійного шару з арсеніду галію. Це перше в історії дослідження Марса з використанням тришарових сонячних батарей. Осередки батарей здатні поглинути більше сонячного світла, ніж їх застаріла версія, встановлена на марсоході «Соджорнер», який працював в 1997 році. Сонячні елементи знаходяться в трьох шарах сонячних батарей марсохода і тому здатні поглинути більше сонячного світла, а внаслідок цього можуть виробляти більше електроенергії для підзарядки літій-іонних акумуляторів роверів.[2]
В місії «Mars Pathfinder» марсохід «Соджорнер» використав один літієвий акумулятор ємністю 40 А·год. В місії «Mars Exploration Rovers» марсоходи використовують два літій-іонних акумулятора, ємністю 8 А·год кожен. Під час роботи «Оппортьюніті» на Марсі максимальний показник виробітку енергії сонячними панелями був близький до 900 Вт·год за 1 марсіанський день, або сол. В середньому сонячні батареї «Спіріта» і «Оппортьюніті» виробляли 410 Вт·год/сол.[2]
Здійснення зв'язку
Зв'язок з орбітальними апаратами

Марсоходи місії «Mars Exploration Rovers» як ретранслятор використовують орбітальний апарат «Марс Одіссей», який постійно обертається навколо червоної планети.
Протягом 16 хвилин він знаходиться в зоні «спілкування» з роверами, після чого ховається за горизонтом. «Спіріт» і «Оппортьюніті» можуть «спілкуватися» з орбітальним апаратом протягом 10 хвилин, в цей період він приймає дані від марсоходів.[3]
Переважна більшість наукових даних передаються на Землю через антену ровера, яка використовується для спілкування з орбітальним апаратом «Марс Одіссей» в дециметровому діапазоні (UHF). «Марс Одіссей» ретранслював на землю основний обсяг наукових даних, отриманих з обох марсоходів. Інший орбітальний апарат, «Mars Global Surveyor», також використовувався як ретранслятор; він передав близько 8% всіх даних, перш ніж вийшов з ладу в листопаді 2006 року, після 10 років роботи. Невеликий обсяг даних був переданий безпосередньо з роверів на Землю через антену X-діапазону[3].
Орбітальні апарати з потужними антенами X-діапазону здатні передавати на Землю дані з більш високою швидкістю. Потужність передавача дуже важлива, бо достатньо чутливих антен на Землі небагато, а їх час обмежений[3].
Зв'язок з перелітним модулем
На перелітному модулі було встановлено дві антени, необхідні для підтримки зв'язку з Землею. Всеспрямована антена з низьким коефіцієнтом посилення використовувалася, коли корабель перебував поруч із Землею. Оскільки вона посилає сигнал у всіх напрямках, їй не потрібно наводитися на Землю. На великих відстанях для зв'язку потрібна гостронаправлена антена з середнім коефіцієнтом посилення. Для успішної роботи вона має бути спрямована у бік Землі[3].
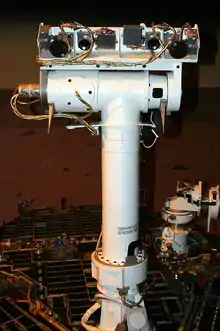
Конструкція марсохода
.jpg.webp)
Марсохід має 6 коліс. Джерелом електроенергії слугують сонячні батареї. При масі в 185 кг апарат оснащено буром, декількома камерами, мікроскопом і двома спектрометрами, змонтованими на маніпуляторі.
Поворотний механізм виконано на основі сервоприводів. Такі приводи розташовані на кожному з передніх і задніх коліс, середня пара таких деталей не має. Поворот передніх і задніх коліс марсохода здійснюється за допомогою електромоторів, що діють незалежно від моторів, що забезпечують переміщення апарату.
Коли марсоходу необхідно повернути, сервоприводи вмикаються і повертають колеса на потрібний кут. Решту часу вони, навпаки, блокують поворот, щоб апарат не збивався з курсу з причини випадкового руху коліс. Перемикання режимів поворот-гальмо проводиться за допомогою реле.
Всі системи марсохода залежать від потужного блоку під назвою «Мозковий центр», який добре захищений від низьких температур. У центрі ровера знаходиться важливий «Тепловий блок електроніки», який відповідає за пересування ровера, а також за розгортання маніпулятора. Бортовий комп'ютер приблизно такої ж потужності, як і тогочасний портативний комп'ютер. Пам'яті приблизно в 1000 разів більше, ніж у його попередника — марсохода «Соджорнер».[4]
Бортовий комп'ютер «Спіріта» і «Оппортьюніті» побудований на 32-бітному радіаційно-стійкому процесорі RAD6000, працюючому на частоті 20 МГц. Він містить 128 мегабайт оперативної пам'яті, а також 256 мегабайт флеш-пам'яті.[4]
Подібно до нашого мозку, який знаходиться під захистом черепа, системи марсохода захищені тим, що встановлені в «Тепловому блоці електроніки», який закріплений у модулі під назвою «Електроніка марсохода». Цей модуль розташований точно в центрі ровера. Золота плівка на стінках блоків допомагає затримувати виділене тепло від обігрівачів, це важливо, оскільки нічні температури на Марсі можуть впасти до -100° C і навіть нижче. Термоізоляцією служить шар з аерогеля. Це унікальний матеріал, що має рекордно низьку густину і проявляє високу твердість, прозорість, жароміцність та надзвичайно низьку теплопровідність. У повітряному середовищі при нормальних умовах його густина за рахунок надзвичайної пористості складає лише 1,9 кг/м³ — всього в 1,5 рази більше густини повітря, через що аерогель отримав назву «твердий дим»[4].
Весь комплекс, що контролює балансування ровера, можна порівняти з людським вестибулярним апаратом. Інерціальний вимірювальний пристрій оцінює кут нахилу марсохода, і ці дані допомагають роверу робити точніші і плавніші рухи[4].
Головний комп'ютер стежить за станом марсохода. Його програмне забезпечення перевіряє працездатність всіх систем ровера[4].
Інновації в місії «Mars Exploration Rovers»
Осторонь від небезпек
У марсохідів місії «Mars Exploration Rovers» є система контролю за небезпечними зонами, в зв'язку з чим під час пересування ровери можуть їх уникати. Реалізація даної системи є першою в історії вивчення Марса; вона розроблена в Університеті Карнегі-Меллона.
Дві інші подібні програми працюють разом для підвищення загальної продуктивності. Перша слідкує за контролем роботи двигуна, управляє колесами марсоходу, щіткою, а також інструментом вишкрібання породи (RAT). Друга (працююча постійно, як вдень, так і вночі) стежить за роботою сонячних батарей ровера, перенаправляє енергію до двох акумуляторів, а також управляє годинником марсохіда[5].
Поліпшений зір
«Спіріт», як і «Опортюніті», має 10 камер[6]. Камери місії «Mars Exploration Rovers» роблять знімки в найбільшій роздільній здатності за всю історію досліджень Марса[5].
Досягнення в галузі технологій допомогло зробити камери більш легкими і компактними, що дозволило встановити по дев'ять камер на кожному ровері, а також по одній камері на спускають платформу (DIMES). Камери роверів розроблені в Лабораторії реактивного руху. Вони є найдосконалішими камерами, які коли-небудь опускалися на іншу планету[5].
Поліпшене стиснення даних
Система стиснення даних, також розроблена в Лабораторії реактивного руху, дозволяє зменшувати обсяг даних для подальшої передачі їх на Землю. ICER створений на основі вейвлет-перетворень, зі здатністю обробляти зображення. Наприклад, зображення розміром 12 МБ в кінцевому підсумку буде стиснуто до 1 МБ і, таким чином, займе набагато менше місця на карті пам'яті. Програма ділить всі зображення в групи, по 30 зображень кожна. Ця процедура істотно знижує ризик втрати знімків при їх відправці на Землю, до Комплексу далекого космічного зв'язку в Австралії[5].
Створення карт місцевості при пересуванні
Також інновацією для цієї місії є можливість створювати карти прилеглої місцевості. Для наукової групи це дуже цінно, так як карти дозволяють визначити прохідність, кут нахилу та освітленість місцевості. Стереознімки дозволяють команді створювати 3D-зображення, що дає можливість точно визначати місце розташування спостережуваного об'єкта. Карти, розроблені на основі цих даних, дозволяють команді знати, як далеко роверу потрібно проїхати до необхідного об'єкта, вони також допомагають у наведенні маніпулятора[5].
Технологія м'якої посадки
Інженери зіткнулися з непростим завданням по зниженню швидкості космічного апарату з 12000 миль/год при вході в атмосферу до 12 миль/год при ударі об поверхню Марса[7].
Покращений парашут і подушки безпеки
Для входу в атмосферу, спуску і посадки в місії «Mars Exploration Rovers» було використано багато чого з напрацювань її попередників: місій «Вікінг» і «Mars Pathfinder» . Для того, щоб зменшити швидкість зниження, місія використовує успадковану технологію парашута апаратів «Вікінг», запущених 1975 року, а також місії Місії Mars Pathfinder (1997 року). Космічні апарати місії «Mars Exploration Rovers» набагато важчі попередніх, базова конструкція парашута залишилася тією ж, але площа у нього на 40% більша, ніж у попередників[7].
Подушки безпеки також були вдосконалені, така технологія пом'якшення приземлення апарату застосовувалася в місії «Mars Pathfinder». Навколо посадкового модуля, який тримав марсохід, перебували двадцять чотири надуті осередки. Подушки безпеки створені з дуже міцного синтетичного матеріалу, званого «Vectran». Цей же матеріал використовується у виготовленні скафандрів. Знову ж таки, зі збільшенням ваги космічного апарату, необхідно було створити більш міцні подушки безпеки. Кілька тестів на падіння показали, що додаткова маса викликає серйозні пошкодження і розрив матеріалу. Інженери розробили подвійну оболонку з подушок безпеки, покликану запобігти серйозним пошкодженням при посадці на високій швидкості, коли подушки безпеки можуть стикнутися з гострим камінням та іншими геологічними особливостями Червоної планети.[7]
Використання ракетних двигунів для зменшення швидкості зниження
Щоб уповільнити спуск космічного апарату, використовувалися три реактивні двигуни (RAD), розташовані по його боках. Радіолокаційна установка (РЛС), встановлена в нижній частині посадкового модуля, визначала відстань до поверхні. Коли спускний апарат був на висоті 1,5 км, радіолокаційна система привела в дію камеру Descent Image Motion Estimation Subsystem (DIMES). Камера зробила три фотографії поверхні (з затримкою 4 секунди), що дозволило автоматично визначити горизонтальну швидкість апарату. Через деякий час нова рухова установка місії «Mars Exploration Rovers» почала гальмування марсоходу «Спіріт». Як і передбачалося, в кратері Гусєва дмуть сильні вітри, які розгойдували спускний апарат «Спіріта» з боку в бік, перешкоджаючи його безпечній посадці. Векторна система з реактивних двигунів (TIRS) перешкоджала хаотичному руху з боку в бік, в результаті чого спускний апарат став більш стабільним при посадці. Під час спуску «Оппортьюніті» на Плато Меридіана була більш сприятлива погода, ніж у кратері Гусєва, тому в цьому випадку не було необхідності задіяти систему TIRS для стабілізації спуску[7].
Покращена мобільність марсохода
Нове програмне забезпечення допомагає уникати перешкод при пересуванні. Коли зіткнення з породою неминуче, у справу вступає вдосконалена система підвіски, з якою роверу набагато легше здійснювати маневри[8].
«Спіріт» і «Оппортьюніті» мали здатність долати різні перешкоди на кам'янистій поверхні Марса. Для місії «Mars Exploration Rovers» система підвіски, яка була застосована раніше на марсоході «Соджорнер», була модифікована[8].
Система підвісок закріплена в задній частині марсохода. Колеса збільшили в розмірах, а також покращили їх конструкцію. Кожне колесо має діаметр 26 сантиметрів. Їх внутрішню і зовнішню частину з'єднує спеціальна спіралевидна структура, яка дозволяє поглинути силу удару і не допустити її поширення. Система підвісок дозволяє долати перешкоди, наприклад, камені, які можуть бути більші самих коліс. Кожне колесо має протектор з характерними виступами, які забезпечують поліпшене зчеплення при їзді по каменях і м'якому ґрунту. Внутрішня частина коліс складається з матеріалу під назвою «Solimide», який зберігає свою еластичність навіть при дуже низьких температурах і тому ідеально підходить для суворих умов Марса[8].
Пересування по шляхах найменшого опору
Марсоходи місії «Mars Exploration Rovers» мають кращі фізичні характеристики, ніж марсохід «Соджорнер» 1997 року, тому «Спіріт» і «Оппортьюніті» можуть бути більш автономними. Інженери поліпшили авто-навігаційне програмне забезпечення водіння, що включає можливість робити і використовувати тривимірні карти місцевості, що робить ровери самостійнішими[8].
Коли роверу дають команду на самостійне пересування, він починає аналізувати довколишню місцевість, після цього робить стереозображення, за допомогою якого вибирає найкращий безпечний маршрут. Марсоходам необхідно уникати будь-яких перешкод на своєму шляху, тому ровери розпізнають їх на своїх стереознімках. Ця інновація дозволила пересуватися на більш довгі відстані, ніж при ручній навігації, керованій з Землі. Станом на середину серпня 2004 марсохід «Оппортьюніті», використовуючи автоматичну самонавігацію, проїхав 230 метрів (третина відстані між кратером Ігл і кратером Витривалість ), марсохід «Спіріт» — більш 1250 метрів із запланованих 3000 метрів шляху до «Пагорбів Колумбії»[8].
Автоматична система навігації робить знімки прилеглої місцевості, використовуючи одну з двох стереокамер. Після цього стереозображення перетворюються у тривимірні карти місцевості, які автоматично створюються програмним забезпеченням ровера. Програмне забезпечення визначає, чи безпечна місцевість, який ступінь прохідності, висота перешкод, щільність ґрунту і кут нахилу поверхні. З десятків можливих шляхів ровер вибирає найкоротший, найбезпечніший шлях до своєї мети. Потім, проїхавши від 0,5 до 2 метрів (в залежності від того, скільки перешкод знаходиться на його шляху), ровер зупиняється, аналізуючи перешкоди, що знаходяться неподалік. Весь процес повторюється, поки він не досягне своєї мети або ж поки йому не накажуть зупинитися з Землі[8].
Програмне забезпечення водіння в місії «Mars Exploration Rovers» досконаліше, ніж у «Соджорнер». Система безпеки «Соджорнер» могла захоплювати тільки по 20 точок на кожному кроці; система безпеки «Спіріта» і «Оппортьюніті» зазвичай захоплює понад 16000 точок. Середня швидкість роверів, з урахуванням ухилення від перешкод, становить близько 34 метрів на годину — в десять разів більше, ніж у «Соджорнер». За всі три місяці своєї роботи «Соджорнер» проїхав трохи більше 100 метрів. «Спіріт» і «Оппортьюніті» перевершили цей рекорд в один і той же день; «Спіріт» проїхав 124 метри за 125 сол, а «Оппортьюніті» проїхав 141 метр за 82 сол.[8]
Ще одна інновація в місії «Mars Exploration Rovers» — це додавання візуального одометра, який перебуває під контролем програмного забезпечення. Коли ровер їде по піщаній або кам'янистій ділянці, то його колеса можуть прослизати і внаслідок цього видавати неправильні показання механічного одометра. Візуальний одометр допомагає виправити ці значення, показуючи, як далеко насправді проїхав марсохід. Він працює шляхом порівняння знімків, зроблених до і після короткої зупинки, автоматично знаходячи десятки примітних об'єктів (наприклад: камені, сліди від коліс і піщані дюни), відстежуючи відстань між послідовно знятими зображеннями. Об'єднання їх у тривимірні знімки надає набагато більше інформації — все це набагато точніше, ніж підрахунок пройденої відстані за кількістю обертів колеса[8].
Батареї та обігрівачі
Обігрівачі, акумулятори та інші компоненти не здатні вижити в холодні марсіанські ночі, тому вони знаходяться в «Тепловому блоці електроніки». Нічна температура може впасти до −105 ° C. Температура акумуляторів повинна бути вище −20 ° C, коли вони живлять системи марсохода, і вище 0 ° C при їх підзарядці. Обігрів «Теплового блоку електроніки» відбувається за рахунок електричних і восьми радіоізотопних обігрівачів, а також за рахунок тепла, що виділяється самою електронікою.[9]
Кожен радіоізотопний обігрівач виробляє близько одного вата тепла і містить близько 2,7 г діоксиду плутонію в гранулах, за формою і розміром нагадують ластик на торці простого олівця. Кожна гранула укладена в металеву оболонку з плутонієво-родієвого сплаву і оточена декількома шарами вуглецево-графітових композитних матеріалів, що весь блок за розміром і формою нагадує C-елементний акумулятор. Ця конструкція з декількох захисних шарів була протестована, причому діоксид плутонію знаходиться всередині обігрівальних елементів, що значно знижує ризик забруднення планети при аварійному руйнуванні марсохіда під час посадки. Інші космічні апарати, в тому числі «Марс Пасфайндер» і марсохід «Соджорнер», для підтримки оптимальної температури електроніки використовували тільки радіоізотопні обігрівачі[9].
Конструкція



Автоматична міжпланетна станція проекту MER включає в себе спускний апарат і перелітний модуль. Для різних етапів гальмування в атмосфері Марса і м'якої посадки спускний апарат містить теплозахисний екран конічної форми, парашутну систему, твердопаливні ракетні двигуни і кулясті повітряні подушки.
| Основні складові | Компонент | Маса | Доповнення |
|---|---|---|---|
| Перелітний модуль | 243 кг | включаючи 50 кг палива | |
| Спускний апарат | Теплозахисний екран | 78 кг | |
| Задній екран і парашут | 209 кг | ||
| Посадкова платформа | 348 кг | ||
| Всього | 878 кг | ||
| Марсохід | 185 кг | ||
| Сумарна маса | 1063 кг |
Марсохід має 6 коліс. Джерелом електроенергії служать сонячні батареї потужністю до 140 ват[10]. При масі в 185 кг марсохід оснащений буром, декількома камерами, мікрокамерою (MI) і двома спектрометрами, змонтованими на маніпуляторі.[11][12]
Поворотний механізм марсохода виконаний на основі сервопривідів. Такі приводи розташовані на кожному з передніх і задніх коліс, середня пара поворотних приводів не має. Поворот передніх і задніх коліс марсохода здійснюється за допомогою електромоторів, що діють незалежно від моторів, що забезпечують переміщення апарату.
Коли марсоходу необхідно повернути, двигуни включаються і повертають колеса на потрібний кут. Весь інший час двигуни, навпаки, перешкоджають повороту, щоб апарат не збивати з курсу через хаотичний рух коліс. Перемикання режимів поворот — гальмо проводиться за допомогою реле.
Також марсохід здатний копати ґрунт (траншею), обертаючи одне з передніх коліс, сам залишаючись при цьому нерухомим.
Бортовий комп'ютер побудований на процесорі RAD6000 з частотою 20 МГц, 128 МБ DRAM оперативної пам'яті, 3 МБ EEPROM і 256 МБ флеш-пам'яті. Робоча температура робота від мінус 40 до плюс 40 °C. Для роботи при низьких температурах використовується радіоізотопний нагрівач, який може доповнюватися також електричними нагрівачами, коли це необхідно.[13] Для теплоізоляції застосовується аерогель і золота фольга.
Інструменти ровера:
- Панорамна камера (Pancam) — допомагає вивчити структуру, колір, мінералогію місцевого ландшафту.
- Навігаційна камера (Navcam) — монохромна, з великим кутом огляду, також камери з більш низькою роздільною здатністю, для навігації та водіння.
- Мініатюрний тепловий емісійний спектрометр (Mini-TES) — вивчає скелі і ґрунт, для більш докладного аналізу, також визначає процеси, які сформували їх.
- Hazcams, дві монохромні камери з 120-градусним полем зору, що забезпечують додаткові дані про стан ровера.
Маніпулятор ровера містить наступні інструменти:
- Мініатюрізованний месбауерський спектрометр (MB) MIMOS II — проводить дослідження мінералогії залізовмісних порід і ґрунтів.
- Спектрометр альфа-частинок (APXS) — аналіз хімічного складу скель і ґрунтів.
- Магніти — збір магнітних частинок пилу.
- Мікрокамера (MI) — отримує збільшені зображення марсіанської поверхні у високій роздільній здатності, своєрідний мікроскоп.
- Інструмент зіскоблювання породи, RAT;(букв. переклад абревіатури — «щур») — алмазний торцевий бур, здатний зробити отвір діаметром 45 мм і глибиною 5 мм на скельній поверхні, а потім змести залишки породи з місця зіскрібка. Інструмент важить 720 грам, споживає потужність 30 Вт.
Роздільна здатність камер 1024×1024 пікселів. Отримані дані зберігаються із стисненням ICER для подальшої передачі.
Порівняння Спіріта c іншими марсоходами

| К'юріосіті | MER | Соджорнер | |
|---|---|---|---|
| Запуск | 2011 | 2003 | 1996 |
| Масса (кг) | 899 | 174 | 10,6 |
| Розміри (в метрах, Д×Ш×В) | 3,1 × 2,7 × 2,1 | 1,6 × 2,3 × 1,5 | 0,7 × 0,5 × 0,3 |
| Енергія (кВт·ч/сол) | 2.5-2,7 | 0,3—0,9 | < 0,1 |
| Наукові інструменти | 10 | 5 | 4 |
| Максимальна швидкість (см/сек) | 4 | 5 | 1 |
| Передача даних (МБ/добу) | 19—31 | 6—25 | < 3,5 |
| Продуктивність комп'ютера (MIPS) | 400 | 20 | 0,1 |
| Оперативна пам'ять (МB) | 256 | 128 | 0,5 |
| Розрахунковий район посадки (км) | 20×7 | 80×12 | 200×100 |
Огляд місії
Основне завдання «Спіріта» полягала в тому, щоб марсохід протримався 90 сол (92,5 земних діб), за цей час проводячи численні дослідження Марса. Місія отримала кілька продовжень і тривала протягом ~ 2208 сол. 11 серпня 2007 «Спіріт» став другим апаратом по терміну функціонування на поверхні Марса — 1282 сол, попередній рекорд належав апарату «Вікінг-2». «Вікінг-2» використовував ядерну енергію, в той час як «Спіріт» живився тільки від сонячних батарей. 19 травня 2010 «Оппортьюніті» став найбільш довго функціонуючим апаратом в історії Марса, попередній рекорд в 2245 сол належав апарату «Вікінг-1». 22 березня 2010 «Спіріт» передав своє останнє повідомлення; таким чином, йому не вистачило 1 місяця, щоб перевершити апарат «Вікінг-1» по терміну служби.
Загальний пройдений шлях станом на 22 березня 2010 ( 2210 сол) склав 7,7305 кілометра.
Події
2004
Спускний апарат з «Спірітом» успішно приземлився на поверхню Марса в 4:35 UTC 4 січня 2004. Це було початком його місії тривалістю в 90 сол. Очищення сонячних батарей дозволило продовжити його місію, і вона тривала до 2010 року.
Меморіальна Станція шаттла Колумбія
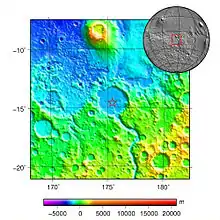
«Спіріт» був направлений в кратер Гусєва, який раніше, можливо, був озером. Ровер приземлився приблизно в 10 км від центру еліпса планованої посадки в точці з координатами 14.5718° пд. ш. 175.4785° сх. д.
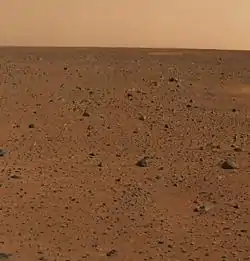
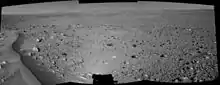
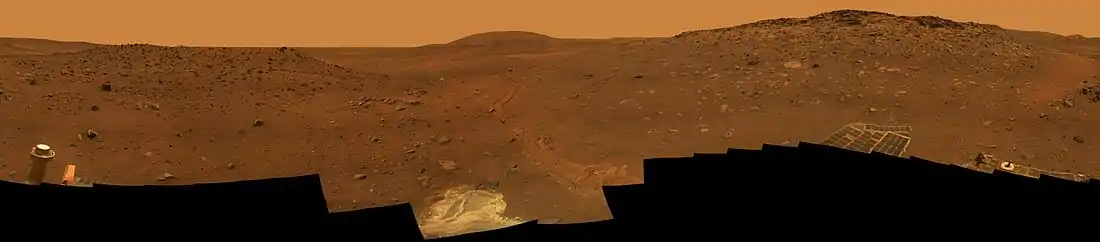
Після того, як спрацювали подушки безпеки і посадкова платформа зупинилася, ровер виїхав і почав передавати панорамні зображення. Вони дають вченим необхідну інформацію для вибору геологічних об'єктів, перспективних для наукових досліджень.
Дане панорамне зображення показує пагорби на горизонті до 27 км. Команда MER назвала посадкову платформу «Меморіальна станція шаттла Колумбія» на честь семи астронавтів, загиблих в космічній катастрофі шатла Колумбія.

Сонна лощина
«Сонна лощина» — дрібне поглиблення, кратер (в правій частині фото) діаметром 9 метрів, що зацікавив вчених з НАСА. Ровер покинув посадкову платформу і був направлений для дослідження цього кратера, що знаходиться на відстані 12 метрів.
Перше кольорове фото
Праворуч перше кольорове зображення, складене з кількох знімків, отриманих панорамною камерою «Спіріта». У знімка була найвища роздільна здатність. «Ми бачимо мозаїку з чотирьох знімків Pancam: одне в висоту і три завширшки», сказав конструктор камери Джим Белл з Корнельського університету. Показаний знімок мав роздільну здатність 4000 на 3000 пікселів. Тим не менш, Pancam-камера може робити знімки в 8 разів більше цього, також вони можуть бути зняті в стереоформаті (наприклад, в два шари, що робить роздільну здатність вдвічі більше). Кольори є достатньо точними.
Камера Pancams робить чорно-білі знімки. Тринадцять обертових фільтрів виробляють одне зображення в різних колірних спектрах. На Землі ці знімки можуть бути скомбіновані для отримання кольорового зображення.
Проблеми з флеш-пам'яттю
21 січня 2004 року (18-й сол з моменту посадки) «Спіріт» несподівано перестав спілкуватися з центром управління. Наступного дня ровер на швидкості 7,8 біт/с передав сигнал, який підтверджує, що марсохід прийняв повідомлення з Землі, але знаходиться в режимі збою, відповіді на команди будуть передаватися тільки періодично. Було заявлено, що виникла серйозна несправність, однак потенційно її можна виправити, в разі, якщо причиною проблеми є програмна помилка, а не апаратний збій. «Спіріту» була дана команда передати дані про його технічний стан. 23 січня ровер спочатку відправив кілька коротких повідомлень на дуже низькій швидкості, після чого, нарешті, здійснив передачу 73 мегабіт (~ 9,1 мегабайт) в X-діапазоні через ретранслятор «Марс Одіссей». Ці дані показали, що марсохід не перейшов в сплячий режим, а значить, він продовжує витрачати енергію в акумуляторах і перегріватися, що потенційно може остаточно вивести його з ладу, якщо проблема не буде виправлена найближчим часом. На 20-й сол інженери відправили команду SHUTDWN_DMT_TIL («Shutdown Dammit Until …», «відключитися до …»), щоб ровер відключився до заданого часу і перестав витрачати енергію, однак він проігнорував цю команду.
Основною версією про сформовану неполадку стало те, що марсохід застряг в т. н. «Перевантажувальній петлі». Марсохід був запрограмований на перезавантаження, якщо в системі виявиться несправність. Однак, якщо помилка відбувалася безпосередньо в процесі перезавантаження, то система починала циклічно перезавантажуватися знову і знову. Той факт, що проблема залишалася навіть після перезавантаження, міг означати, що помилка була не в оперативній пам'яті, а в флеш-пам'яті або в апаратному збої EEPROM . Останній випадок, найімовірніше, означав би вихід ровера з ладу. Припускаючи, що помилка може бути саме у флеш-пам'яті або EEPROM, інженери зробили дії з перезавантаження ровера без використання флеш-пам'яті. Була можливість передавати обмежений набір команд по радіо, достатній, однак, для того, щоб наказати марсоходу перезавантажитися без використання флеш-пам'яті, що, в кінцевому підсумку, призвело до розриву «перевантажувальної петлі» і відновленню працездатності.
24 січня 2004 інженери ровера оголосили, що проблема була у флеш-пам'яті і програмному забезпеченні, яке було використано для її запису. Було заявлено, що апаратна частина флеш-пам'яті працювала нормально, а програмний модуль управління файлами виявився «недостатньо відмовостійкий» для виконуваних «Спірітом» операцій, підкреслюючи, що проблема була викликана саме помилкою в програмному забезпеченні, а не несправністю устаткування. Інженери НАСА виявили, що в файловій системі містилося занадто багато файлів, що було класифіковано як незначна проблема. Більшість з них містили дані, зібрані під час польоту, і не були потрібні для подальшої роботи. Прийшовши до цього висновку, інженери видалили частину файлів і переформатували файлову систему на флеш-пам'яті. 6 лютого (33-й сол) марсохід був приведений в робочий стан, і наукові дослідження поновилися.
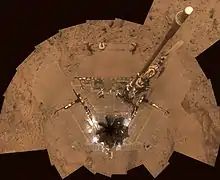
Перше буріння на Марсі

Круглий неглибокий отвір на зображенні утворений в ході першого буріння породи на Марсі. Інструмент RAT на марсоході Спіріт просвердлив отвір у камені, названому Адірондак, 6 лютого 2004 (34-й сол) . Глибина отвору складає 2,65 мм, а діаметр — 45,5 мм. Воно відкриває свіжі гірські породи для найближчого дослідження за допомогою мікроскопічної камери і двох спектрометрів, які знаходяться на руці-маніпуляторі. Цей знімок був зроблений панорамною камерою, за допомогою його можна швидко визначити успішність буріння.
«RAT перевершив всі наші очікування», — сказав Стів Горевен, провідний вчений інструментів зіскрібання породи на обох роверах. «З такими параметрами свердління, я не думав, що воно буде настільки глибоким. Насправді, коли ми побачили практично ідеальне коло, я був схвильований; я міг про таке тільки мріяти. Також отвір був добре очищено від пилу».
Камінь Мімі (40-й сол)

Це кольорове зображення, зроблене панорамною камерою «Спіріта» на 40-й сол (13 лютого 2004). На знімку камінь під назвою «Мімі». Це лише один з безлічі каменів у цій області. Область носить назву Stone Council (Братство Каменя, від однойменного роману), але камінь відрізняється від всіх будь-яких каменів, які вчені побачили в кратері Гусєва досі. Луската поверхня каменю Мімі призводить вчених до ряду гіпотез. Мімі, можливо, був підданий високому тиску внаслідок поховання в глибоких шарах чи ударного впливу, або він колись був частиною дюни, яка була спресована у вигляді лускатих шарів, процес, який іноді пов'язаний з дією води.
Камінь Хамфрі
5 березня 2004 НАСА оголосило, що «Спіріт» знайшов вказівки на наявність води в минулому в камені під назвою «Хамфрі». Доктор Раймонд Арвідсон, професор університету Макдоннела, кафедри планетарних наук в Університеті Вашингтона, Сент-Луїсі, повідомив під час конференції НАСА: «Якби ми знайшли цей камінь на Землі, ми б сказали, що він вулканічний, і в ньому побувало трохи рідини, яка рухалася по його тріщинах». На відміну від каменя, знайденого марсоходом «Оппортьюніті», цей зразок сформувався з магми, а потім у його невеликих тріщинах з'явився яскраво забарвлений матеріал, який виглядає як кристалізовані мінерали. Якщо ця інтерпретація вірна, то мінерали, швидше за все, виникли з водного розчину, який впливав на нього після того, як камінь сформувався.
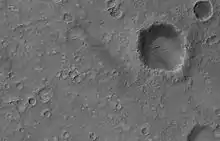
Кратер Бонневіль
11 березня 2004 (65-й сол) «Спіріт» досяг кратера Бонневіль, проїхавши 370 м. Кратер має близько 200 метрів в діаметрі, його поверхня на 10 м нижче навколишньої поверхні. В Лабораторії реактивного руху вирішили, що немає сенсу відправляти марсохід всередину кратера, так як вони не бачать в ньому цікавих для дослідження об'єктів. «Спіріт» поїхав уздовж південного краю кратера і попрямував на південний захід до пагорбів Колумбії.
.jpg.webp)
Кратер Міcсула
На 105-й сол «Спіріт» досяг кратера Міссула з приблизним діаметром 100 м і глибиною близько 20 м. Кратер Міссула не визнаний пріоритетною метою для дослідження, оскільки він не містить гірських порід, більш древніх, ніж раніше вивчені. Ровер обігнув його по північному краю і попрямував на південний схід.

Кратер Лахонтен
«Спіріт» досяг кратера Лахонтен на 118-й сол і їхав по його краю до 120-го сола. Кратер Лахонтен має близько 50-60 метрів в діаметрі і близько 10 метрів в глибину. Від його південно-західного краю простягається довга дюна; марсохід обійшов її, так як невідомі дюни становлять великий ризик для коліс ровера, які можуть забуксувати в м'якому ґрунті.
Пагорби Колумбія
На 159-й сол «Спіріт» сягнув однієї з багатьох цілей на Пагорбах Колумбії — місця, названого Західний Отрог (West Spur). Лощина Хенка (Hank's Hollow)[14] біля підніжжя Пагорбів Колумбії вивчалася протягом 23 солів; в ній був виявлений незвичайний камінь, названий «Горщик із золотом» (Pot of Gold).
«Спіріт» взяв напрямок до скелі під назвою «Вовняна Заплатка» (Wooly Patch) і вивчав її з 192-го по 199-й сол. На 203-ї сол «Спіріт» їхав на південь, вгору по схилу, і прибув до оголених скельних порід, названих «Кловіс» (Clovis). Скала вивчалася з 210-го по 225-й сол. Після Кловіс ровер вивчав інші цілі — Авен (226–235 сол), Тетл (Tetl, «камінь» мовою майя, 270 сол), Учбен (Uchben — «стародавній») і Паленке (Palenque, 281–295 сол), Лютефіск (Lutefisk, 296–303 сол). Протягом 239–262 сол «Спіріт» був зупинений через верхнє сполучення Марса, так як в цей час між Землею і Марсом знаходилося Сонце і зв'язок між ними був неможливий.
«Спіріт» їздив навколо пагорба Хасбанда (Husband Hill, названий на честь астронавта Р. Хасбанда, загиблого в катастрофі шаттла «Колумбія»), і в 344 сол був готовий направитися до «Cumberland Ridge», «Larry's Lookout» і «Tennessee Valley».

2005
На 371 сол "Спіріт" прибув до каменя під назвою «Спокій» у верхній частині хребта Камберленд. Спіріт досліджував камінь за допомогою інструменту RAT на 373 сол.
До 390 сол (в середині лютого 2005 року) «Спіріт» поїхав у напрямку місця «Larry's Lookout», під гору в зворотному напрямку. Інженери намагалися зберегти стільки енергії, скільки б вистачило для підйому в гору.
«Спіріт» у дорозі виконав ряд задач, у тому числі досліджував ґрунт під назвою «Пасо Роблес», там ровер виявив найбільшу концентрацію солі, яку було знайдено на Червоній планеті. Також ґрунт містив велику кількість фосфору, проте не так багато, як у каменя «Wishstone». Скваерс сказав стосовно відкриття: «Ми все ще намагаємося розібратися, що це означає, але, очевидно, що з великою концентрацією солі навколо, раніше тут був рукав води».
 Камінь «Горщик із золотом».
Камінь «Горщик із золотом». «Спіріт» піднімається до "Husband Hill".
«Спіріт» піднімається до "Husband Hill". Spirit вручну доданий до знімку (зроблений ним самим). Знято на височині "Larry's Lookout".
Spirit вручну доданий до знімку (зроблений ним самим). Знято на височині "Larry's Lookout". Фотографія марсіанського заходу Сонця, зроблена Спірітом у кратері Гусєва, 19 травня
Фотографія марсіанського заходу Сонця, зроблена Спірітом у кратері Гусєва, 19 травня
Пилові вихори
До 9 березня 2005 продуктивність сонячних панелей марсохода знизилася до 60%, тоді як спочатку було 93%. 10 березня ровер спостерігав за курними дияволами. Вчені НАСА припускають, що пилові дияволи повинні очистити сонячні панелі від пилу, тим самим значно збільшивши тривалість місії. Це перший курний диявол, який коли-небудь помічали «Спіріт» або «Оппортьюніті», також це один з найкращих моментів місії. Раніше їх сфотографував тільки зонд «Пасфайндер» з марсоходом «Соджорнер».
Члени місії «Спіріта» повідомили, що 12 березня 2005 щаслива зустріч із порошним дияволом очистила сонячні батареї від пилу. Рівень вироблюваної енергії різко зріс, щоденні дослідження будуть розширені.
Прибуття до пагорба Хасбанда
На 582 сол, 21 серпня 2005 року «Спіріт» досяг вершини пагорба Хасбанда, була отримана 360-градусна панорама.

2006
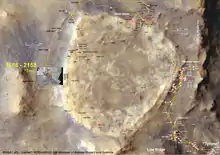
У 2006 році «Спіріт» відправився до місця під назвою Домашнє плато (Home Plate), і досяг його в лютому.
Домашнє плато (744 сол)
Спіріт прибув до північно-західної частини Домашнього плато і піднявся на шаруваті оголення до 744 сола (лютий 2006 року), приклавши для цього великі зусилля. За допомогою маніпулятора були проведені наукові дослідження.
У 2007 році Спіріт провів кілька місяців у підніжжя Домашнього плато. До 1306 сол Спіріт підійнявся на східний край Домашнього плато. У вересні та жовтні ровер досліджував гірську породу і ґрунт в різних місцях південної частини Домашнього плато. 6 листопада Спіріт досяг західного краю Домашнього плато і почав передавати панорамні знімки плато.
Пагорб МакКула

Наступна зупинка «Спіріта» була запланована на північному схилі пагорба МакКула, де «Спіріт» буде отримувати достатню кількість сонячного світла під час марсіанської зими. 16 березня 2006 року JPL оголосило, що у «Спіріта» почалися проблеми з правим переднім колесом, незабаром воно взагалі перестало працювати. Незважаючи на це, «Спіріт» як і раніше робить успіхи в дослідженні пагорба Маккула; у зв'язку зі зламаним колесом інженери перепрограмували ровер, тепер він буде їхати задом, волочачи за собою поламане колесо. Наприкінці березня «Спіріт» зіткнувся з пухким ґрунтом, який перешкоджає дослідженню пагорба МакКула. Було прийнято рішення про припинення дослідження пагорба Маккула і замість цього його відправили досліджувати сусідній хребет під назвою «Невеликий притулок».
Хребет «Невеликий притулок»
Доїхавши до хребта 9 квітня 2006, ровер припаркувався на гребені з кутом нахилу в 11° на північ, «Спіріт» провів вісім місяців на гребені, в цей час він спостерігав за найближчими околицями. Ровер не пересувався, так як у нього був низький рівень енергії, проблеми з енергією він мав під час марсіанської зими. Ровер зробив свій перший рух, коли зробив короткий маневр до каменя, щоб він був у межах досяжності роботизованої руки, на початку листопада 2006 року, після коротких днів верхнього з'єднання Марса, зв'язок із Землею був обмежений.
Під час знаходження «Спіріта» на хребті «Невеликий притулок» він досліджував два камені і зробив хімічний аналіз, подібний до складу метеорита «Heat Shield Rock», який знайшов марсохід «Оппортьюніті». Вони отримали назви «Чжун Шань» на честь Сунь Ятсена і Аллан-Хіллз, за місцем в Антарктиді, де було знайдено кілька марсіанських метеоритів, що виділялися на тлі снігу темним кольором. Далі проводилося спектрографічне дослідження, щоб визначити точний склад порід, які можуть виявитися метеоритом.
Оновлення програмного забезпечення
4 січня 2007, до 3-ї річниці посадки, програмне забезпечення марсоходів було оновлено. Тепер марсохід міг самостійно приймати рішення про необхідність передачі зображення, вивчення гірської породи, протягування маніпулятора і т. д., без участі операторів з Землі. Це істотно прискорило дослідження, так як відпала необхідність узгодження дій апарату, який більше не чекав радіосигналу з НАСА, і спростило роботу дослідників, котрі до цього самостійно аналізували сотні зображень, що приходили від марсохода.
Відкриття «Ключа»

Неробоче колесо «Спіріта» принесло користь для програми. Ровер з грудня 2007 року тягне за собою непрацююче колесо, яке зіскрібає верхній шар марсіанського ґрунту, відкриваючи нові ділянки землі. Вчені вважають, що такі зрізи містять достатньо відомостей про минуле навколишнього середовища Марса, яке, на їх думку, підходило для життя мікробів.
Вона схожа на райони Землі, де вода або пар від гарячих джерел вступають в контакт з вулканічними породами. «На Землі ці місця, як правило, кишать бактеріями», — сказав головний оператор марсохода Стів Скуірес. «Ми цьому дуже раді», — додав на зустрічі Американського геофізичного союзу (AGU). Цей район містить високу концентрацію кремнезему — головного компонента стекла. Дослідники дійшли висновку, що яскравий матеріал міг утворитися тільки двома способами. Перший: гаряче родовище під землею, коли вода розчиняється з кремнеземом в одному місці, а потім вивергається назовні (наприклад, гейзером). Другий: кислий пар, що піднімається через тріщини в гірських породах вбирає мінеральні компоненти, потім залишає кремнезем. Важлива річ полягає в тому, яка з гіпотез вірна, так як це має значення про минуле середовища на Марсі. Скуірес пояснив для BBC News, що гаряча вода є середовище, у якому мікроби можуть вільно розвиватися, виробляючи кремнезем. Скуірес додав: «У будь-якому місці Землі, ви можете знайти гарячі джерела, а в них є всі необхідні компоненти для мікробного життя».
Пилова буря
До кінця червня 2007 пилові бурі почали закривати марсіанську атмосферу пилом. Пилова буря посилилася, і 20 липня як у «Оппортьюніті», так і у «Спіріта» з'явилася реальна можливість вийти з ладу через відсутність сонячного світла, яке потрібне їм для вироблення енергії. НАСА розповсюдило повідомлення для преси, в якому говорилося: (частково) «Ми віримо в наші ровери, і сподіваємося, що вони переживуть цей шторм, але вони не розроблялися для таких умов». Основна проблема полягала в тому, що пилова буря різко знизила надходження сонячного світла. В атмосфері Марса знаходиться так багато пилу, що вона блокує 99 відсотків прямих сонячних променів, які повинні падати на сонячні панелі. Марсохід «Спіріт», який працює на іншій стороні Марса, отримував трохи більше світла, ніж його близнюк «Оппортьюніті».
Зазвичай сонячні батареї на роверах виробляли близько 700 ват·год (2,5 МДж) енергії на день. Під час бурі це число значно змешилося, ровери генерували тільки 128 ват·год (0,48 МДж) на день. Якщо б ровери виробляли менше 150 ват·год (0,54 МДж) на день, то вони почали б втрачати заряд акумуляторів. Якщо акумулятори вичерпаються, то основне обладнання, ймовірно, вийде з ладу через сильний холод. Інженери запрограмували обидва ровери на низьке споживання енергії для того, щоб перечекати бурю. Наприкінці серпня буря почала слабшати, що дозволило апаратам успішно зарядити свої акумулятори. Вони продовжували перебувати в сплячому режимі, щоб перечекати залишки бурі.
2008

10 листопада 2008 року через сильні пилові бурі вироблення енергії скоротилася до 89 Вт·год на день — критичний рівень. Співробітники НАСА висловили сподівання, що «Спіріт» переживе негоду, то вироблення енергії збільшиться, і що вітер очистить сонячні панелі від пилу. Інженери намагалися заощадити енергію за рахунок відключення деяких приладів, включаючи обігрівачі. 13 листопада 2008 марсохід прокинувся і здійснив контакт з ЦУП за розкладом.
З 14 листопада 2008 по 20 листопада 2008 сонячні панелі «Спіріта» виробляли 169 Вт·год на день. Обігрівач для Теплового Емісійного спектрометра (який споживав близько 27 ват·год енергії на день) був відключений 11 листопада 2008 року, його тестування показало, що він пошкоджений. Відключення дозволило заощадити значну частину енергії, необхідну для обігрівача ровера. Незабаром сталося верхнє сполучення Марса (положення, коли Сонце знаходиться між Марсом і Землею), і тому з 29 листопада 2008 року по 13 грудня 2008 спілкування з марсоходом було неможливо.
2009

6 лютого 2009 вітер вдало здув частину пилу з сонячних панелей. Це призвело до збільшення вироблення енергії до 240 ват·год в день. НАСА заявило, що прибавка енергії буде використовуватися переважно для пересування.
З 18 по 28 квітня вироблення енергії продовжувало збільшуватися за рахунок нових очисток панелей вітром. Воно піднялося з 223 ват·год на день (31 березня), до 372 ват·год на день (29 квітня).
Зав'язання в піщаній дюні
1 травня 2009 ровер застряг в м'якому ґрунті, багатому сульфатом заліза (ярозитом), який був під кіркою нормального ґрунту. Сульфат заліза дуже пухкий, і колеса ровера в ньому прокручуються. Члени команди Лабораторії реактивного руху відтворили ситуацію за допомогою макета марсохода на Землі і проводили з ним випробування; також вони проводили комп'ютерне моделювання в спробах знайти вихід зі сформованої ситуації. Ситуацію важко відтворити на Землі, оскільки на Марсі менші сила тяжіння та атмосферний тиск. Тести з макетом «Спіріта» були проведені в Лабораторії реактивного руху в спеціальній пісочниці, щоб спробувати зімітувати пухкий ґрунт в умовах слабкої гравітації. Спроби вивільнення ровера розпочалися 17 листопада 2009 року.
17 грудня 2009 праве переднє колесо несподівано відпрацювало в нормальному режимі протягом перших трьох спроб обертання. Було невідомо, наскільки це допоможе, так як праве заднє колесо вийшло з ладу 28 листопада і залишалося непрацюючим до кінця місії. У ровера залишалося тільки чотири повністю працюючих колеса. Виникла загроза, що якщо команда не зможе звільнити ровер і відрегулювати кут нахилу сонячних панелей, то марсохід зможе протриматися тільки до травня 2010 року.
Стаціонарна платформа для досліджень
26 січня 2010, після декількох місяців невдалих спроб звільнення марсохода, НАСА вирішило перейменувати місію ровера, назвавши її стаціонарною платформою для досліджень. Зусилля були спрямовані на підготовку більш підходящого положення відносно до Сонця, для забезпечення ефективної підзарядки акумуляторів ровера. Це було необхідно для збереження найпотрібніших інструментів під час марсіанської зими. 30 березня 2010 «Спіріт» не вийшов на запланований сеанс зв'язку, і, як припускають інженери, перейшов в сплячий режим через брак енергії.
Останній сеанс зв'язку
Останній зв'язок з марсоходом був на 2210 сол (22 березня 2010 року), є велика ймовірність того, що батареї марсохода втратили так багато енергії, що в якийсь момент годинник місії зупинився. У попередні зими марсохід зміг залишатися під потрібним кутом до Сонця і зберігати свою внутрішню температуру не нижче −40 °C, але так як марсохід застряг у піску і не був під потрібним кутом до Сонця, за оцінками, його внутрішня температура впала приблизно до −55 °C.
Кінець місії
Лабораторія реактивного руху продовжувала спроби відновити контакт зі «Спірітом» до 25 травня 2011 року, коли НАСА оголосило про припинення зусиль відновити з ним контакт, а також про завершення місії. Основною причиною виходу марсохода з ладу вважається вплив низьких температур, які пошкодили важливі деталі і обладнання. Через суворі марсіанські зими і недостатню кількість сонячного світла марсохід отримував недостатньо енергії, тому обігрівачі працювали нестабільно.
Примітки
- Наукові цілі марсохода (англійською). НАСА. Архів оригіналу за 24 серпня 2011. Процитовано 5 червня 2011.
- Technologies of Broad Benefit: Power. mars.nasa.gov. Архів оригіналу за 28 березня 2015. Процитовано 29 березня 2015.
- Technologies of Broad Benefit: Telecommunications.
- Technologies of Broad Benefit: Avionics
- Technologies of Broad Benefit: Software Engineering
- DOI:10.1029/2003JE002077
Нема шаблону {{Cite doi/10.1029/2003JE002077}}.заповнити вручну - In-situ Exploration and Sample Return: Entry, Descent, and Landing.
- In-situ Exploration and Sample Return: Autonomous Planetary Mobility.
- Batteries and Heaters
- Mars Exploration Rover Mission: The Mission
- Chang, Kenneth (7 листопада 2004). Martian Robots, Taking Orders From a Manhattan Walk-Up. The New York Times. Процитовано 9 квітня 2009.
- Squyres, Steve (2005). Roving Mars: Spirit, Opportunity, and the Exploration of the Red Planet. Hyperion Press. с. 113–117. ISBN 978-1-4013-0149-1.
- MER - Batteries and Heaters. Jet Propulsion Laboratory. NASA. Архів оригіналу за 18 жовтня 2012. Процитовано 13 серпня 2012.
- Названа на честь покійного Генрі «Хенка» Мура (Henry «Hank» J. Moore II), вченого, який брав участь в місіях «Вікінг» та «Пасфайндер».
Посилання
JPL, MSSS, and NASA links
- JPL's Mars Exploration Rover Mission home page
- (obsolete JPL Mars Exploration Rover home page)
- Spirit Mission Profile by NASA's Solar System Exploration
- Planetary Photojournal, NASA JPL's Planetary Photojournal for Spirit
- NASA TV Special Events Schedule for MER News Briefings at JPL
- Mission Status updates from NASA JPL
- Wikisource:NASA MER press briefings
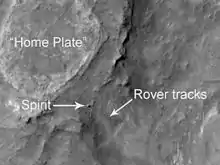
- Finding Spirit: high resolution images of landing site (Mars Global Surveyor — Mars Orbiter Camera)
Інші Інтернет-ресурси
- SpaceFlightNow Status Page last updated May 2004
- Marsbase.net, a site that tracks time on Mars.
- MAESTRO — public version of rover simulation software (requires download, last update October 25, 2004)
- Cornell's rover site: Athena last update 2006
- Finding Spirit: interactive Mars atlas based on Viking images: you can zoom in/out and pan images, to find your preferred site. «Spirit» approximate position is 14,82°S (= −14.82°N) , 184,85°W (= 5,15°E) (not working as of 2008-06-04)
- Google map with Spirit landing site marked
- (AXCH) 2004 Mars Exploration Rovers Highlights — News, status, technical info, history, and more.
- New Scientist on Spirit Dust Devils, 15 March 2005
- New Scientist on Spirit Wheel Status, 03 April 2006
- Unmanned Spaceflight.com discussion on Spirit as of 2008-06-04 last updated 2008-06-04
- «Mars Rover Beginning To Hate Mars», satire from The Onion, October 24, 2006
- Full-page, High-res spherical panorama of Spirit in the Columbia Hills, nasatech.net, Nov 23 to Dec. 5, 2005 (long download, uses Java)
- Full-page, High-res spherical panorama of Spirit at the summit of Husband Hill, nasatech.net, Nov 23 to Dec. 5, 2005 (long download, uses Java)
