Декка-навігатор
РНС «Декка» (англ. Decca Navigator) — фазова радіонавінгаційна система на довгих хвилях. Станції РНС «Декка» працювали в діапазоні 70-130 кГц. Стандартний ланцюжок «Декки» складався з чотирьох передавачів — ведучої станції і трьох ведених. Кожна станція ланцюжка випромінювала незгасальні коливання на заданій частоті, яка була гармонікою основної, «базисної», частоти f, приблизно рівної 14,2 кГц. Вперше була розгорнута Великою Британією під час Другої світової війни в Північному морі. Її призначенням було забезпечення військової навігації в прибережних водах. Після війни основними її споживачами стали рибальські судна, але використовувалася вона і в авіації. Систему «Декка» використовували до початку ХХІ століття — через широке використання GPS «Декка-навігатор» була вимкнена в Європі опівночі 31 березня 2000 року.
| DECCA Decca Navigator | |
|---|---|
 Прийомоіндикатор-«декометр» Decca Mk 21 | |
| Основна інформація | |
| Тип | фазова радіонавінгаційна система на довгих хвилях |
| Країна |
|
| Виробник | Decca Records — Decca Navigator Company Ltd. |
| Конструктор | Вільямом Дж. О'Браєн |
| Параметри | |
| Роки експлуатації | 1944—2001 |
| Число установок | понад 15 000 суднових прийомо-індикаторних приладів (1970) |
| Статус | вимкнена (2000-2001) |
| Діапазон частот | 70-130 кГц |
| Максимальна дальність | вдень 240 миль від ведучої станції, вночі — 400—500 миль |
| Точність за дальністю | на цих відстанях визначення місця судна виробляються з похибкою ± 0,1-0,5 милі вдень і ± 0,2-1,0 милі вночі |
| Інші назви | Dectra, Hi-Fix |
Історія створення і експлуатації
Радіонавігаційна система «Декка» була розроблена в США, але зрештою розгорнута лондонською компанією Decca Records у Великій Британії, через що її часто називають британською навігаційною системою.
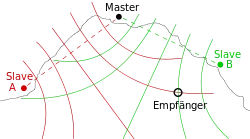
Те, що в кінцевому підсумку стало РНС «Декка», було задумано американським інженером Вільямом Джозефом О'Браєном, який на замовлення McDonnell Douglas мав розробити наземний радіоприлад вимірювання швидкості польоту літака для випробувань Douglas DC-3. Перша ідея О'Браєна полягала в застосуванні ефекту Доплера, але тогочасні технології не могли забезпечити достатню стабільність передавача, тож він прийшов до ідеї використання двох зв'язаних наземних передавачів, з яких один слугував би орієнтиром для іншого. В часи, коли ще не з'явилися імпульсні методи порівняння сигналів, єдиним доступним методом цього було порівняння фази прийнятих сигналів безперервних хвильових передач. О'Браєн дійшов висновку, що в системі необхідно використовувати станції, які передають на різних, але гармонійно пов'язаних частотах, що можуть бути приведені до загальної, «базисної», частоти для порівняння фаз у приймачі. Для того, щоб підтримати усі ведені (slave) станції в синхронізації з ведучою (master), він запропонував ввести в систему моніторну станцію, яка відслідковувала б усі станції і повертала фазу на станції-порушнику назад в синхронізм. Це саме по собі вимагало, щоб контрольний приймач був дуже перешкодостійкою конструкцією, яка б не вводила власні помилки в розрахунки. Навігаційний приймач, «декометр», являв собою трьохканальний (пізніше — чотирьохканальний) приймач, який здійснював паралельно прийом сигналів від ведучої і ведених станцій та наступне їх порівняння і аналіз за заданим алгоритмом. Саме розробка навігаційного приймача — «декометра» є головною заслугою О'Браєна. Ще однією перевагою нової системи було те, що передачі були простими немодульованими радіохвильовими несучими хвилями, які могли бути виявлені приймачами дуже вузької пропускної здатності, тим самим виключаючи потребу у великих потужностях передавачів[1].
О'Браєн протягом 1936—1938 років провів у Каліфорнії ряд експериментів, втім і армія США, і військово-морський флот вважали ідею О'Браєна занадто складною, тож роботи закінчилися у 1939 році[2]. Після початку Другої світової війни, бажаючи підтримати оборону Британії, О'Браєн надіслав свої напрацювання другові Харві Дж. Шварцу, головному інженеру радіотелевізійної компанії «Декка». Заручившись підтримкою виконавчого директора «Декки» Едварда Льюїса, в жовтні 1939 року Шварц надіслав листа, в якому виклав ідеї щодо «Системи управління напрямками для посадки і наведення літаків» О'Браєна, серу Генрі Тізарду в Міністерство авіації, який в свою чергу передав його начальнику радіодепартаменту Національної фізичної лабораторії Роберту Уотсон-Ватту, який пропозицію відхилив, вважаючи систему занадто ненадійною[1]. Незважаючи на відмову О'Браєн і Шварц, за підтримки компанії «Декка» продовжили працювати над системою — в Каліфорнії були проведені випробування прототипу, який фіксував рух автомобіля. Головний передавач прототипу передавав сигнал на частоті на 300 кГц, ведений — на 600 кГц. Порівняння було зроблено на частоті 1200 кГц. Випробування підтвердили життєздатність системи[3].

У жовтні 1941 року системою зацікавилося Управління зв'язку Британського адміралтейства (ASE) — інтерес моряків обумовив той фактор, що в пропонованій «Декка» системі використовувалася передача на низьких радіочастотах, на відміну від авіації, яка переважно застосовувала УКХ-засоби, які діють в межах прямої видимості. Британське адміралтейство, яке розпочало планувати майбутню висадку у Франції, потребувало точної навігаційної системи[3]. ASE класифікувала систему як Admiralty Outfit QM, а морські випробування «навігаційній системи О'Браєна» були проведені у 1942 році[2]. Для перших випробувань, які відбулися 16 вересня 1942 року, система складалася з одного ланцюжка ліній позицій, утворюваних парою станцій, які були встановлені в Англсі на мисі Кармел-Хед і в бухті Бул-Бей. Гармонічне співвідношення частот, яке було застосоване під час випробувань у США, було збережене, при цьому ведуча станція Кармел-Хед випромінювала сигнал на частоті 305 кГц, а ведена Бул-Бей — 610 кГц, частота порівняння складала 1220 кГц. Передавачі типу Admiralty мали потужність 12 кВт. Приймально-індикаторний пристрій корабельного приймача являв собою простий вимірювач центрального нуля, керований ланцюгом «половини» фазового дискримінатора, який вимірював зміни фаз до ±90°, на відміну від повного дискримінатора — «декометра», розробленого пізніше для кругового зчитування фазометра через один оборот за один цикл різниці фаз[1].
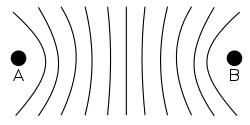
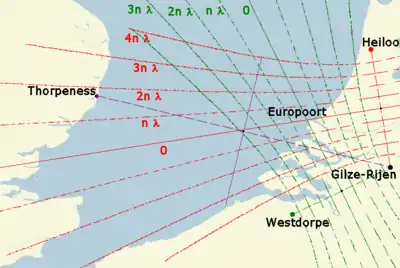
За результатами випробувань 1942 року було встановлено, що при частоті ведучої станції у 600 кГц загасання приземних радіохвиль було занадто високим, що призводило до неприйнятних параметрів співвідношення сигнал/шум. Новий запропонований формат частот формувався у вигляді 6f, 8f та 9f, де f — приблизно 14 кГц, з чого були виведені частоти, передані ведучою «червоною» станцією і веденою «зеленою» відповідно. Сигнали двох ведених станцій могли поєднуватись з сигналом ведучої, створюючи дві пересічні гіперболічні картини, шляхом порівняння фаз у 24f та 18f. Графічно лінії відмінних кольорів утворювали на карті сітку, яка і фіксувала позицію приймача. Нові випробування були проведені у квітні 1943 та, з наближенням операції союзників в Європі, в січні 1944 року в Ірландському морі. Після цього випробування було прийнято рішення про прийняття QM на озброєння як критично важливу для мінно-оперативних аспектів операції «Нептун». Був створений ланцюг станцій РНС «Декка», що складався з ведучої станції, відомої як «А», поруч з Чичестером та ведених у Суонеджі у Дорсеті (червона станція «B») та приблизно в милі від внутрішньої частини Бічі-Хед (зелена «С»). В гирлі Темзи, на острові Шеппі, був розташований четвертий, хибний, передавач, з метою дезінформації противника, що вторгнення буде зосереджено в напрямку на Кале. Станції будувались в умовах режиму повної секретності. Передача з ланцюга розпочалася на початку 5 червня 1944. Ланцюг «Декка» в протоці Ла-Манш проіснував протягом декількох місяців після вторгнення в Нормандію[1][3].
На початку березня 1943 року «Декка» отримала замовлення на виготовлення 27 корабельних прийомо-індикаторів Admiralty Outfit QM для Королівського військово-морського флоту. Все обладнання було доставлено до середини травня. Апаратура QM була встановлена на 21 міноносець та інші судна, і 5 червня 1944 року 17 з цих кораблів використовували його для точного плавання Ла-Маншем та постановки мінних полів у запланованих районах для висадки в Нормандії[2][3].
Після закінчення Другої світової війни, у 1945 році, для комерційного використання системи «Декка» була утворена компанія дочірня компанія Decca Records — Decca Navigator Company Limited. Перший комерційна мережа станцій РНС «Декка» була розгорнута на південному сході Англії в 1946 році, а для риболовецьких і торговельних суден запропонований комерційний аналог QM Decca MkIV. Система швидко розширилася, особливо в районах британського впливу. Тільки довкола Англії було розгорнуто чотири ланцюги «Декки», один в Ірландії та два у Шотландії; 12 у Скандинавії — по п'ять у Норвегії та Швеції та по одному в Данії та Фінляндії; ще чотири в інших місцях північної Європи та два в Іспанії[3]. Інші ланцюги були створені в Японії (6 ланцюгів); Намібії та Південній Африці (5 ланцюгів); Нігерії (2 ланцюги); Індії та Бангладеш (4 ланцюги); а також в Канаді (4 ланцюги навколо Ньюфаундленду та Нової Шотландії), Австралії (2 ланцюги в північно-західній Австралії); Перській затоці (один ланцюг станцій в Катарі і Об'єднаних Арабських Еміратах, другий — на півночі затоки зі станціями в Ірані), два ланцюги на Багамах (один ланцюг). Дві ланцюги «Декка» використовувались у В'єтнамі під час В'єтнамської війни для вертолітної навігації. «Декка-навігатор» використовувався переважно для прибережного і каботажного судноплавства, пропонуючи кращу точність, ніж конкуруюча система LORAN. Основним споживачами були рибальські судна, втім система використовувалася і літаками, а також в Північному морі вертольотами, що обслуговували нафтові платформи. У 1970 році використовувалось понад 15 тисяч суднових прийомо-індикаторних приладів РНС «Декка»[2].
У 1946–47 роках до складу ланцюгів РНС «Декка» була ведена третя, «фіолетова», станція. Спочатку це мав бути slave частотою 7f, порівняння фаз у 42f, але, для зменшення коефіцієнтів множення та уникнення втручання в смугу частот, передбачену для прогнозованої низькочастотної РНС LORAN, були обрані несуча частота 5f та частота порівняння 30f. Обраний формат частот передавачів 5:6:8:9 і робочий діапазон системи 70-130 кГц залишався незмінним до завершення експлуатації РНС «Декка» на початку ХХІ століття[1]. У 1949 році в системі «Декка» вперше почали застосовувати шляхопрокладальник з рухомою картою місцевості.
Радіонавігаційна система «Декка» продовжувала діяти до початку ХХІ століття, але не витримала конкуренції з супутниковою навігацією. Через широке використання GPS в березні 2000 року «Декка-навігатор» була вимкнена в Європі, а останній її світовий ланцюг — в Японії — вимкнений у 2001 році.
Принцип дії і технічні характеристики
Комплект засобів для місцевизначення за допомогою РНС «Декка» складається з ланцюга берегових станцій, суднового прийомоіндикатора і спеціальних радіонавігаційних карт з нанесеними на них сітками гіперболічних ліній положення.
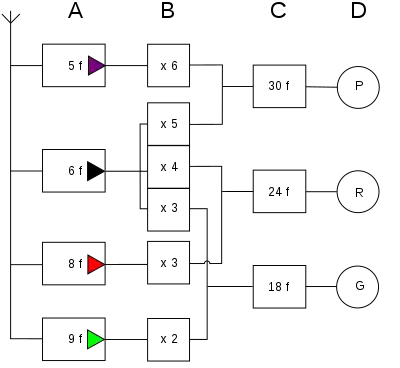
Стандартний ланцюг системи складається з чотирьох берегових передавальних станцій, одна з яких ведуча, а решта ведені. Деякі ланцюги мають тільки дві ведених станції, наприклад, ланцюг 6Е, який обслуговує Фінську затоку. Ланцюги розрізняються між собою значеннями випромінюваних частот. Частота кожної станції є гармонікою основної, «базисної», частоти 1f. Ведучі станції ланцюгів випромінюють коливання на частоті гармоніки 6f (діапазон 84-86 кГц), а ведені — на частотах 5f (діапазон 70-72 кГц), 8f (діапазон 112—115 кГц) і 9f (діапазон 126—129 кГц). Ланцюги станцій відрізняються один від одного значеннями базисного коливання 1f (14-14,4 кГц), які мають 63 номінали, і мають відповідні позначення і номери: в залежності від частоти базисної станції номінали нумеруються від 0 до К з додаванням літерних позначень А, В, С, I, Е, F (наприклад, 7В, SC, 2A тощо). Для відмінності кожній парі станцій (ведуча — одна з ведених) присвоюється свій колір: 6f і 5f — фіолетова, 6f і 8f — червона і 6f і 9f — зелена. Шкали прийомоіндикаторів («декометрів») і відповідні ізолінії на декка-картах також позначені цими кольорами.
Загальні принципи
| Колір | Гармоніка веденої | Множник веденої | Гармоніка ведучої | Множник ведучої | Результуюча частота |
|---|---|---|---|---|---|
| Фіолетовий | 5f | ×6 | 6f | ×5 | 30f |
| Червоний | 8f | ×3 | 6f | ×4 | 24f |
| Зелений | 9f | ×2 | 6f | ×3 | 18f |
РНС «Декка» відноситься до фазових системам з частотною селекцією сигналів. Станції системи забезпечують два режими роботи — режим створення точної сітки і режим усунення багатозначності (впізнання доріжок). Вимірювання різниці фаз між коливаннями ведучої і веденої станцій може проводитися тільки на одній частоті — частоті порівняння приблизно рівній 14,2 кГц. Для цього прийняті і посилені в приймачах коливання трансформуються по частотах в найменші загальні кратні гармоніки 6f/5f, 6f/8f, 6f/9f, тобто в частоти 30f, 24f і 18f відповідно. Вимірювання різниць фаз між коливаннями на цих частотах порівняння визначає гіперболічна ізолінія положення L.
Для усунення багатозначності кожна пара станції по черзі випромінює сигнали у вигляді короткочасних посилок на частотах 6f і 5f (ведуча), 9f і 8f (ведена). Ці посилки перетворюються судновому прийомоіндикаторі в різницеві частоти 6f-5f = lf і 9f-8f = lf і подаються на фазометр визначення доріжок — грубий декометр. В режимі створення точної сітки прийомоіндикатор здійснює прийом, посилення сигналів берегових станцій, приведення їх до єдиної для кожної пари частоти порівняння і видачу на декометри напруг, пропорційних різниці фаз порівнюваних коливань (коливання 8f червоної веденої станції множаться на 3, а ведучої 6f — на 4 і приводяться до однакової частоти порівняння 24f, тобто 340 кГц; коливання 9f зеленої веденої станції множаться на 2, а ведучої 6f — на 3 та приводяться до частоти порівняння 18f 255 кГц; коливання 5f фіолетовою веденої станції множаться на 6, а ведучої 6f — на 5 і приводяться до частот 30f, що дорівнює 426 кГц)[4].
Частоти порівняння подаються на відповідні червоний, зелений і фіолетовий декометри, малі стрілки яких покажуть різниці фаз коливань (положення судна всередині червоних, зелених і фіолетових доріжок). Малі стрілки фазових лічильників — декометрів з'єднані з великими стрілками через понижуючі передачі — великі стрілки декометрів вказують номер доріжки. Аби не переплутати відліки доріжок, зовнішні шкали декометрів оцифровані в наступній послідовності: у червоного декометра — від 0 до 24, у зеленого — від 30 до 48 і у фіолетового — від 50 до 80. Доріжки утворюють зони, які позначаються буквами латинського алфавіту А, В, С… Червона зона складається з 24, зелена з 18, фіолетова з 30 доріжок. При перетині судном однієї доріжки мала стрілка декометра робить один оборот, а велика переміщається на одну поділку. При перетині судном зони велика стрілка лічильника доріжок робить один оборот, а покажчик зони переміщається на одну букву[4].
Грубий декометр має три концентричні шкали зеленого, червоного і фіолетового кольорів з нумерацією, що відповідає оцифруванню шкал точних декометров. Ці шкали в грубому декометрі автоматично підсвічуються в тій же послідовності, в якій працюють берегові станції — червоним, зеленим, фіолетовим світлом. Для безперервного автоматичного записи руху судна по РНС «Декка» існує шляхопрокладальник. Автоматичний прокладальник дозволяв безперервно контролювати маневрування судна, його швидкість та місце із записом цих елементів на спеціальну навігаційну карту.
Точність місцевизначення
Дальність дії РНС «Декка» залежить від умов поширення радіохвиль і довжини бази між станціями. Зазвичай складає вдень 240 миль від ведучої станції, вночі — 400—500 миль. На цих відстанях визначення місця судна виробляються з похибкою ± 0,1-0,5 милі вдень і ± 0,2-1,0 милі вночі[5].
Середня квадратична похибка визначення місця оцінюється за картами-схемами робочих зон кожного ланцюжка РНС в залежності від освітленості іоносфери у «Атласі зон точності визначення місця корабля за допомогою РНС „Декка“». Діаграми градацій освітленості в Атласі наводяться під картами-схемами і розрізняються між собою залежно від широти місця установки ланцюжків станцій. Гіперболічні ізолінії положення, створювані РНС, розраховуються на середню фазову швидкість поширення радіохвиль різними трасами, тому поблизу районів з різкою зміною провідності траси можуть виникати «місцеві», систематичні похибки у вимірюваннях. Систематичні похибки визначаються в основному при калібруванні ланцюжків РНС[5].
Примітки
- Blanchard, Walter (March 2015). The Genesis of the Decca Navigator System. Journal of Navigation 68 (2): 219–237. Процитовано 08.10.2019. (англ.)
- The Archives of the Decca Navigator Company. IET Archives Blog. Stories from the Institution of Engineering and Technology. 04.11.2015. Процитовано 08.10.2019. (англ.)
- Decca Navigator — History. Hyperbolic radionavigation systems. Compiled by Jerry Proc VE3FAB. Процитовано 08.10.2019. (англ.)
- Ермолаев Г.Г., Андронов Л.П., Зотеев Е.С., Кирин Ю.П., Черниев Л.Ф. Береговые цепочки РНС «Декка-навигатор» и блок-схема судового приемоиндикатора // Морское судовождение. — 3-е издание, переработанное. — Москва : «Транспорт», 1970. — 368 с. (рос.)
- Ермолаев Г.Г., Зотеев Е.С. Радионавигационные системы // Основы морского судовождения. — 5-е издание. — Москва : «Транспорт», 1988. — С. 153-155. (рос.)
Джерела
- Ермолаев Г.Г., Зотеев Е.С. Радионавигационные системы // Основы морского судовождения. — 5-е издание. — Москва : «Транспорт», 1988. — С. 153-155. (рос.)
- Ермолаев Г.Г., Андронов Л.П., Зотеев Е.С., Кирин Ю.П., Черниев Л.Ф. Береговые цепочки РНС «Декка-навигатор» и блок-схема судового приемоиндикатора // Морское судовождение. — 3-е издание, переработанное. — Москва : «Транспорт», 1970. — 368 с. (рос.)