Робот-гуманоїд
Робот-гуманоїд (людиноподібний робот) — це машина, чиє шасі (ходова частина) виконано у вигляді людиноподібного тіла. Гуманоїдний дизайн робота зумовлений певною метою: функціональністю — для використання людських інструментів чи середовищ життя людини; з експериментальною метою — для вивчення прямоходіння; з медичною метою — вивчення впливу на організм тих чи інших навантажень; або для інших цілей. Загалом, людиноподібні роботи мають тулуб, голову, дві руки і дві ноги; хоча деякі види людиноподібних роботів можуть моделювати тільки частину тіла, наприклад, від голови — до пояса. Деякі людиноподібні роботи можуть мати голову, призначену для реплікації людських рис обличчя (таких, як очі і рот тощо).
| Робот-гуманоїд | |
|---|---|
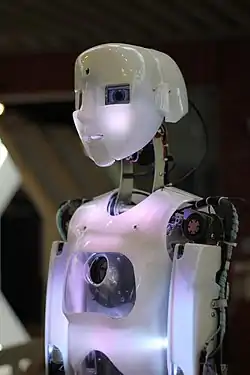 Робот у музеї DASA (Дортмунд, Німеччина) Робот у музеї DASA (Дортмунд, Німеччина) | |
| Автор |
Айзек Азімов (письменник) Джей Вінтар (сценарій) |
| Виконавець | Алан Тудик (голос і образ) |
| Прототип | INS-4 |
| Інформація | |
| Прізвисько | INS-5 |
| Рід занять | допомога у домашніх справах, розваги |
| Вид (раса) | автономний домашній робот |
| | |
Загальні відомості


Людське пізнання — це таке поле наукового дослідження, що фокусується на вивченні принципів того, як людина навчається завдяки сенсорній інформації, щоб набути чуттєвих чи моторних навичок. Це знання застосовують для вироблення концептуальних моделей людської поведінки і її вдосконалення. Припускають, що дуже досконалі роботи будуть використовувати досвід звичайних людей — а також служитимуть меті покращення життя звичайних людей, особливо людей із вадами здоров'я (Див.: Трансгуманізм).
Роботів-гуманоїдів будуть використовувати як інструмент дослідження в кількох наукових царинах. Дослідникам може бути необхідно зрозуміти структуру людського тіла і його біомеханіку, щоб виготовити, дослідити моделі і побудувати людиноподібних роботів. З іншого боку, спроба імітувати людський організм приводить до кращого розуміння вказаних задач.
Початковою метою створення гуманоїдних роботизованих систем були проблеми ортопедії і протезування для людей; здобутки у цій царині використовували обидві наукові дисципліни. Ось кілька прикладів: роботизований протез для ноги із нейро-м'язовими порушеннями; гомілковостопна ортопедія, біологічно-реалістичні протези ноги і передпліччя тощо. Окрім цих досліджень, гуманоїдні роботи розроблено виконувати завдання, які раніше виконували люди: особиста допомога хворим і літнім людям, брудні і небезпечні види роботи, бойові системи, реклама і мас-медіа тощо. Рутинна робота, наприклад, на посаді реєстратора чи спеціаліста на ресепшені; на конвеєрі, де потрібна точність і вправність людських рук і людських рішень — усе це також царина застосування гуманоїдних роботів. По суті, людиноподібні роботи можуть використовувати усі інструменти, якими користуються люди; теоретично, гуманоїд може виконати будь-яке завдання, призначене людині, — якщо у робота є відповідне програмне забезпечення. Тим не менш, складність досягнення цього надзвичайно велика.
Роботи-гуманоїди стають винятково популярними у царині розваг. Наприклад, Урсула, жінка-робот співає, грає музику, танцює і розмовляє з аудиторією у компанії «Universal Studios». Кілька Диснеївських атракціонів використовують аніматронів — роботів, які виглядають, рухаються і розмовляють, як люди. Ці аніматрони виглядають настільки реалістично — що здалеку навіть важко розрізнити робота і людину, яку він зображає. Проте, незважаючи на реалістичний вигляд, вони не мають свідомости чи фізичної автономії. Різні гуманоїдні роботи і їх можливе застосування у повсякденному житті показано у документальному фільмі «Plug & Pray»,[lower-alpha 4] який вийшов на екрани 2010-го року.[4]
Гуманоїдні роботи, особливо ті, що їх буде наділено штучним інтелектом, будуть винятково необхідні на майбутніх небезпечних професіях, наприклад, при освоєнні космосу або експериментальній космонавтиці, де повернення космонавта на Землю після закінчення місії не є обов'язковим чи можливим.
Сенсори
Сенсор (або давач) — це пристрій, який вимірює чи оцінює певні характеристики довкілля. Оскільки є одним з трьох основ робототехніки (крім планування і контролю), збір інформації про довкілля сенсорами відіграє важливу роль в основах робототехніки.[lower-alpha 5]
Сенсори можна класифікувати відповідно до фізичних процесів, із якими вони мають справу, — чи відповідно до типу виміряної (оціненої) інформації, яку вони збирають, і забезпечують нею центральний процесор робота. У цілому ж, сенсори можна розділити на два типи: пропріоцептивні і екстероцептивні.
Опишемо ці типи.
Пропріоцептивні сенсори
Пропріоцептивні[lower-alpha 6] сенсори оцінюють положення, орієнтацію і швидкість людиноподібного тіла (і його окремих членів) робота.
У людини є внутрішнє вухо, яке, головним чином, відповідає за сприйняття балансу і орієнтації тіла в просторі. Гуманоїдні роботи використовують Акселерометри, щоб вимірювати прискорення, із чого швидкість можна вирахувати шляхом інтегрування; датчик нахилу вимірює нахиленість корпуса відносно певної осі; силовий сенсор поміщено у руки і ноги робота, щоб виміряти силу впливу на робота довкілля; сенсори положення, що вимірюють положення робота у певний момент (із чого швидкість можна вирахувати шляхом ділення різниці між двома послідовними положеннями [відстані] на час) або й навіть датчики швидкости.
Екстероцективні сенсори
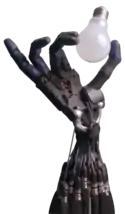
Щоб виміряти дані про той об'єкт, до якого маніпулятор робота доторкнувся, можна використовувати масив тактильних сенсорів[lower-alpha 7]. Цікавим напрацюванням є Shadow Dexterous Hand (букв.: «Спритна тіньова рука») від компанії «The Shadow Robot Company» (Лондон). Це роботизований маніпулятор гуманоїдної форми («механічна рука» точно копіює людську руку за розміром і формами, а також вона наділена тими ж ступенями свободи, що і людська).[6] Ця «Тіньова рука» має 34 тактильні сенсори під поліуретановим «шкірним покривом» кожного із кінчиків пальців.[7] Тактильні сенсори також надають інформацію про силу і імпульс (крутний момент), що виникає між роботом і іншими об'єктами.
Комп'ютерний зір[lower-alpha 8] здійснює оброблення даних за будь-яким методом, який використовує електромагнітний спектр для отримання зображення. У гуманоїдних роботів цей «зір» використовується для розпізнавання об'єктів та визначення їх властивостей. Візуальні датчики працюють подібно до очей людини. Більшість роботів використовують ПЗЗ для камер чи датчиків зображення.
Звукові сенсори допомагають роботам-гуманоїдам чути мову і звуки довкілля, тож вони працюють ніби як вуха (зовнішні вуха) людини. Для таких задач використовують мікрофони.
Існує ряд інших сенсорів: сенсори інтенсивности потоку світла, радіації (і іншого забруднення), шуму, температурні датчики — усе це зумовлюється конкретною практичною потребою, заради якої і було побудовано робота.
Приводи
Сервоприводи — у нашому випадку це спеціальні пристрої (мотори), що відповідають за рух частин тіла робота.
Гуманоїдні роботи сконструйовані таким чином, щоб мімікувати людське тіло; тож вони використовують силу-силенну сервоприводів, здатних діяти як м'язи і суглоби, хоча і мають відмінну конструкцію. Щоб досягти схожости на людину у русі, гуманоїдні роботи використовують, в основному, поворотні приводи. Ці пристрої можуть бути як електричними, так і пневматичними, гідравлічними, п'єзоелектричними чи ультразвуковими.
Гідравлічні й електричні приводи мають стійкі режими роботи і можуть взаємодоповнювати одне одного в єдиній системі шляхом відносно складної стратегії оцінки і прийняття рішень. У той час як електричні безсердечникові двигуни краще пристосовані для високих швидкостей і незначного навантаження — гідравлічні працюють краще на невисоких швидкостях і з великими навантаженнями.
П'єзоелектричні актуатори генерують крихітний рух, проте надзвичайно велику силу (якщо дозволяє електронапруга). Такі сервоприводи можна застосовувати для надточного позиціонування і вироблення високої сили пресу у статичних і динамічних ситуаціях.
Ультразвукові актуатори створюють, щоб продукувати рухи на мікроскопічному рівні за допомогою ультразвуку (понад 20 kHz). Вони корисні для контролю вібрацій, позиціонувння і швидкого переключення режимів роботи.
Пневматичні актуатори використовують одну із властивостей газу — стисливість. Коли газ розпиляється — то рухається к хаотичних напрямках. Коли ж стискається — всі молекули рухаються в одному напрямі (до центру контейнера). Якщо одну зі сторін контейнера з газом у сервопривода закрити, то молекули будуть рухатися лінійно. Ці властивості говорять про те, що сервоприводи такого типу мають низьку швидкість і низьке навантаження. Серед пневматичних сервоприводів розрізняємо: циліндровий двигун, міхи, пневматичні м'язи, пневматичні двигуни звичного типу і пневматичні крокуючі двигуни.
Планування і контроль
У плануванні й контролі головною відмінністю між людиноподібними і іншими видами роботів (наприклад, промисловими) є те, що рухи і поведінка робота мають бути людиноподібними, включаючи власне спосіб пересування (із допомогою ніг), особливо двох — що називається ходінням. Ідеальне планування «людських» рухів під час звичайної «прогулянки» робота має передбачати мінімальне споживання енергії, як це має місце в людському тілі. Із цієї причини набуває виняткової важливости вивчення таких наукових дисциплін, як Динаміка і теорія управління процесами.
Для підтримки динамічної рівноваги під час ходіння, робот потребує інформації про силу контакту з поверхнею, а також інформацію про його поточне положення і бажане переміщення (про його рух). Розв'язання цієї проблеми спирається на основи концепції, відомої під назвою «Точка нульового моменту руху» (ZMP)[lower-alpha 9].
Іншою важливою особливістю гуманоїдних роботів є те, що вони рухаються, збирають інформацію про довкілля (за допомогою сенсорів) і взаємодіють із довкіллям (із «реальним світом»). Вони не залишаються нерухомими, як фабричні автоматизовані системи чи інші роботи, що працюють у дуже структуризованому (алгоритмізованому) середовищі. Аби гуманоїди рухалися у складних середовищах, планування і контроль мусять зосередитися на самостійному виявленні зіткнень із перешкодами, плануванні шляху обходу перешкод і на виконанні цього плану.
Насамкінець слід зазначити, що роботи-гуманоїди ще не мають деяких особливостей людського тіла: структури зі змінною гнучкістю, які забезпечують безпеку (самого робота — і людини відповідно); надмірности можливих варіантів рухів, тобто більше ступенів свободи і, отже, ширшого діапазону доступних для виконання завдань. Більшість гуманоїдних роботів — не універсальні, а спроектовані під специфічні завдання. Хоча із чисто теоретичної точки зору ці характеристики є бажаними для людиноподібних роботів, на практиці вони принесуть більше складності і породять велику кількість нових проблем планування і контролю.
Хронологія розвитку досягнень у царині людиноподібних роботів
| Рік | Розвиток |
|---|---|
| 250 р. до н. е. | У книзі «Лей-цзи» описано автомат (механізм).[8] |
| 50 р. н. е. | Грецький математик Герон Александрійський описав машину, яка б автоматично наливала гостям вино на бенкеті.[9] |
| 1206 | Арабський (курдський) математик, інженер і винахідник Аль-Джазарі описав групу штучних гуманоїдних автоматів, які (відповідно до слів Чарльза Бі. Фовлера) виконували «більше 50 мімічних і тілесних дій під час кожної музичної композиції»."[10] За чутками, Аль Джазарі створив автоматичний пристрій для умивання рук,[11] і Годинник-слон — механізм, що включав у себе автоматичного гуманоїда (магаута, погонича слона), котрий бив у цимбали щопівгодини. Програмований «замковий годинник» винахідника також мав п'ять музичних автоматів, котрі виконували різні композиції (автомати задіювалися схованим кулачковим валом, приєднаним до водяного колеса).[12] |
| 1495 | Леонардо да Вінчі розробив креслення людиноподібного автомата, що виглядав як лицар у броні (відомий як робот Леонардо).[13] |
| 1738 | Французький винахідник Жак де Вокансон побудував Гравця на флейті (фігуру пастушка в реальний розмір), який міг грати дванадцять пісень на флейті, і Гравця на тамбурині (бубні), який грав на флейті і на барабані чи тамбурині.[14] |
| 1774 | Майстер-годинникар П'єр Жаке-Дроз і його син Генрі-Луї створили Гравця у шашки, Музисьєна (Музиканта, фр.) і Писарчука — фігурку хлопчика, що міг писати послання, які містили до сорока знаків.[15] |
| 1898 |
Нікола Тесла прилюдно продемонстрував «автоматонну» технологію бездротового керування моделлю човна на «Електричній виставці», що відбулася в Медісон Сквер Гарден в Нью-Йорку в розпал іспано-американської війни. |
| 1921 | Чеський письменник Карел Чапек запропонував слово «robot» (робот) у своїй п'єсі «R.U.R. (Россумські Універсальні Роботи)». Слово «робот» прийшло з чеського слова «robota», що значить у чеській і польській мовах «примусова праця, важка робота».[13] |
| 1927 | У кінематографі з'являються: Maschinenmensch (нім. Машиненменш, «машино-людина»), гіноїдний робот-гуманоїд, також відомий як «Пародія» (Parody), «Футура» (Futura), «Роботрикс» (Robotrix), а також як «Марія імперсонатор» (Maria impersonator), яку зіграла німецька акторка Бриґитта Гельм, із фільму Фріца Ланґа «Метрополіс». |
| 1941-42 | Айзек Азімов сформулював Три закони робототехніки; а роблячи це, увів у користування і сам термін «робототехніка». |
| 1948 | Норберт Вінер сформулював принципи кібернетики — основи практичної робототехніки. |
| 1961 | На конвеєрі компанії «Дже́нерал Мо́торз» установлено «Unimate», першого програмованого негуманоїдного робота із цифровим управлінням: він мав піднімати гарячі шматки металу з-під машини лиття під тиском і складати їх стосами. Ро́бота створив Джордж Девол; він же сконструював «Unimation», першу роботизовану виробничу компанію. |
| 1969 | Д. Е. Вітні опублікував свою статтю «Вирішення проблеми управління рухом маніпуляторів і людських протезів» («Resolved motion rate control of manipulators and human prosthesis»).[16] |
| 1970 | Міомір Вукобратовіч (Miomir Vukobratović, Юґославія) запропонував теорію «Точки нульового моменту» (Zero Moment Point), теоретичну модель для пояснення пересування на двох кінцівках.[17] |
| 1972 | Міомір Вукобратовіч і його колеги в Інституті Міхайла Пупіна (Юґославія) побудували перший активний антропоморфний екзоскелет. |
| 1973 | В університеті Васеда, в Токіо, було побудовано робота «Wabot-1». Він міг спілкуватися з людьми японською мовою: він оцінював відстані до об'єктів і напрям руху за допомогою зовнішніх рецепторів, штучних вух і очей, також мав штучний рот.[18] |
| 1980 | Марк Райберт (Marc Raibert) заснував «MIT Leg Lab», лабораторію, де вивчали проблеми пересування за допомогою ніг і проблеми створення робота, який переміщається за допомогою ніг.[19] |
| 1983 | У Центрі космічних і військово-морських бойових систем у Сан Дієґо було створено робота «Greenman» (букв. «Зелений чоловічок»). Він мав екзоскелет із тулубом, руками і головою. Його система візуального сприйняття довкілля складалася із трьох відеокамер.[20] |
| 1984 | В університеті Васеда було створено робота «Wabot-2»: це був музичний гуманоїдний робот, здатний спілкуватися з людьми, читати ноти з допомогою сенсорів-очей і грати на електронному органі складні музичні композиції.[18] |
| 1985 | Компанія «Hitachi Ltd» створила «WHL-11», двоногого робота, який здатний пересуватися рівною поверхнею (витрачаючи по 13 секунд на крок), а також розвертатися.[18] |
| 1985 | «WASUBOT» — це піший музичний робот, створений в університеті Васеда. Він грав концерти разом із Симфонічним оркестром NHK (Токіо) на церемонії відкриття Міжнародної виставки Науки і Технології. |
| 1986 | Корпорація «Honda» створила 7 двоногих роботів, названі від «E0» (Експериментальна модель № 0) до «E6» відповідно. «E0» було створено 1986-го року, «E1» — «E3» між 1987-м і 1991-м роками, а «E4» — «E6» було створено між 1991-м і 1993-м.[21] |
| 1989 | Створено «Менні» («Manny») — повноцінний антропоморфний робот з 42 ступенями вільности, якого розроблено в «Тихоокеанській північно-західній лабораторії Battelle» (Річленд, штат Вашинґтон), для полігону «Даґвей» армії США у штаті Юта. Робот не міг ходити самостійно, але міг повзати, і мав штучну дихальну систему для імітації дихання і потовиділення. Робота використовували як унаочнення для навчання солдатів.[18] |
| 1990 | Тед МакДжир (Tad McGeer) представив двоногу механічну структуру з колінами, що здатна пересуватися на похилій площині.[22] |
| 1993 | «Honda» розробила роботів серій «P1» (Прототип, модель 1) — «P3», еволюцію серії «E», що має верхні кінцівки. Серію розробляли з 1997-го року.[21] |
| 1995 | В університеті Васеда було розроблено «Hadaly», гуманоїдного робота для вивчення принципів спілкування. Він мав 3 підсистеми: зорову підсистему, систему контролю голосу для спілкування японською і підсистему контролю руху, що використовує руку для вказання напряму. |
| 1995 | В університеті Васеда створено двоногого робота, який міг самостійно рухатися. |
| 1996 | У Токійському університеті створено «Saika», легкого і дешевого гуманоїдного робота. «Saika» має шию із двома ступенями вільності, дві п'ятиступеневі (за ступенями вільності) верхні кінцівки-руки, тулуб і голову. Кілька типів руки і передпліччя перебувають у стадії розробки. Дослідження проводили до 1998-го року.[18] |
| 1997 | Для інтерактивної комунікації з людьми в університеті Васеда створено гуманоїдного робота «Hadaly-2». Він спілкується не лише інформаційно, а й фізично (жести, міміка). |
| 2000 | «Honda» створила свого одинадцятого двоногого гуманоїдного робота, здатного бігати. Назвали робота ASIMO.[21] |
| 2001 | Корпорація «Sony» представила невеликого гуманоїдного робота для розваг, якого назвала «Sony Dream Robot» (SDR). Ро́бота було перейменовано в «Qrio» 2003-го року. |
| 2001 | Корпорація «Fujitsu» створила свого першого комерційного гуманоїдного робота на ім'я «HOAP-1». Його наступників «HOAP-2» і «HOAP-3» було анонсовано 2003-го і 2005-го років, відповідно. «HOAP» призначено для широкого кола додатків для НДДКР робото-технологій.[23] |
| 2002 | Виробничий науково-технологічний центр (MSTC) у Токіо створює двоногого робота «HRP-2».[24] |
| 2003 | У Мюнхенському технічному університеті створено «JOHNNIE», автономного двоногого робота, головним завданням якого було зрозуміти принципи динамічно-стійкої ходи у антропоморного робота.[25] |
| 2003 | В університеті Осака, у співпраці з компанією «Кокоро» (Kokoro Company Ltd.) розроблено робота «Actroid», гуманоїдного робота з реалістичною силіконовою «шкірою».[26] |
| 2004 | У Ісфаханському Технологічному університеті (Іран) разом із компанією «ISTT» було створено першого іранського гуманоїдного робота «Persia».[27] |
| 2004 | Японська компанія «Kondo Kagaku» представила програмованого двоногого гуманоїдного робота «KHR-1». |
| 2005 | У співпраці між конструктором роботів Девідом Генсоном, Технологічним інститутом «FedEx» і університетом Мемфісу було створено робота «PKD[lower-alpha 10] Android», гуманоїдного робота для дослідження особливостей спілкування; вигляд робота дуже нагадує зовнішність відомого американського письменника-фантаста Філіпа Кіндреда Діка.[28] |
| 2005 | Компанія «Mitsubishi Heavy Industries» створила робота «Wakamaru», домашнього гуманоїдного робота, призначеного головним чином для спілкування із літніми людьми і людьми з вадами здоров'я.[29] |
| 2005 | Французька компанія «Aldebaran Robotics» створила «Nao» — маленького програмованого людиноподібного робота, що має операційну систему з відкритим вихідним кодом. Робота «Nao» широко використовують у всьому світі в університетах як платформу для досліджень і з освітньою метою (для унаочнення).[30] |
| 2005 | Хіроши Ішиґуро (Hiroshi Ishiguro, директор «Intelligent Robotics Laboratory» компанії «ATR») у співпраці з компанією «Kokoro» (Токіо) створили серію роботів «Geminoid». Ця серія роботів є надзвичайно реалістичними гуманоїдними роботами типу «Actroid». Оригінальний робот «Geminoid HI-1» було створено за подобою самого Хіроши Ішиґуро. Наступні роботи «Geminoid-F» і «Geminoid-DK» було створено 2010-го і 2011-го років відповідно.[30] |
| 2006 | Створено «REEM-A» — двоногого гуманоїдного робота для гри в шахи з «рушієм» (програмою для гри в шахи) від шахової машини «Hydra». Це перший робот, створений компанією «PAL Robotics»; він може ходити, говорити, має візуальні сенсори.[31] |
| 2006 | Створено «iCub» — двоногого гуманоїдного робота, що має операційну систему з відкритим вихідним кодом. Робота створено з дослідницькою метою.[32] |
| 2006 | У Південній Кореї створено «MAHRU», двоногого гуманоїдного робота, що використовує комп'ютерну мережу для імітації основ штучного інтелекту (для баз даних і алгоритсмів більшою мірою).[33] |
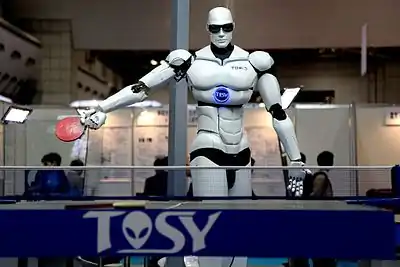
| 2007 | В'єтнамська виробнича компанія «TOSY Robotics JSC» створила «TOPIO», робота для гри у пінґ-понґ.[34] |
| 2007 | «Лабораторія Суґано» університету Васеда створила домашнього робота «Twendy-One». Він не двоногий, а використовує спеціальний механізм, що здатний пересуватися у будь-якому напрямку.[35] |
| 2008 | «Німецький Аерокосмічний Центр» (DLR) розробив «Justin», гуманоїдного робота на чотириколісній платформі.[36] |
| 2008 | У співпраці між п'ятикратним чемпіоном РобоКубка (RoboCup) — Команди Осаки (Team Osaka) — і компанією «KumoTek Robotics» було створено «KT-X», першого міжнародного гуманоїдного робота.[37] |
| 2008 | «Nexi», першого мобільного «кмітливого» соціального ро́бота, анонсовано в журналі «TIME» як топ-винахід року.[38] Ро́бота створено у співпраці між компаніями «MIT Media Lab Personal Robots Group»,[39] «Xitome Design»,[40] «UMass Amherst» i «Meka robotics».[41][42] |
| 2008 | У США, нарешті, створено Salvius (robot), першого американського робота-гуманоїда із операційною системою з відкритим вихідним кодом. |
| 2008 | Компанія «PAL Robotics» створила свого другого двоногого робота серії «REEM» (він називається «REEM-B»). Робот має здібність автономно навчатися і вивчати довкілля, використовуючи різноманітні сенсори, а також переносити на собі до 20 % від своєї власної ваги.[43] |
| 2009 | У Національному інституті передової промислової науки і технології (National Institute of Advanced Industrial Science and Technology) створено японського людиноподібного домашнього робота «HRP-4C», якого наділено частиною людських властивостей (на додачу до двоногого ходіння). |
| 2009 | У Стамбульському університеті Сабанчи (Sabancı University, Туреччина) разом із компанією «Tubitak» було створено домашнього робота «SURALP».[44] |
| 2009 | Університет Васеда представив «Kobian», людиноподібного робота, що може ходити, говорити і дуже правдоподібно виражати емоції (використовуючи міміку й жести).[45] |
| 2010 | НАСА і компанія «Дженерал моторз» представили «Robonaut 2», дуже передового людиноподібного робота. Робот був частиною «корисного вантажу» шатла «Discovery», який успішно запустили 24 лютого 2011 року. Робот призначений для виходів у відкритий космос у межах програми НАСА із колонізації космосу.[46] |
| 2010 | Студенти Тегеранського університету (Іран) представили людиноподібного робота «Surena II». Цього робота репрезентував сам Президент Ірану Махмуд Ахмадінежад.[47] |
| 2010 | Дослідники японського Національного інституту передової промислової науки і технології продемонстрували свого гуманоїдного робота «HRP-4C», який співав і танцював разом із виконавцями-людьми.[48] |
| 2010 | У вересні 2010-го Національний інститут передової промислової науки і технології також продемонстрував гуманоїдного робота «HRP-4». Робот «HRP-4» нагадує «HRP-4C» в деяких аспектах, але його називають «спортивним», а не «гіноїдом», бо зовні він виглядає масивнішим і уже не схожий на жінку. |
| 2010 | З'являється «REEM», людиноподібний робот-офіціант із колісною рухомою базою замість ніг (як було у «REEM-A» і «REEM-В»). Це нове дітище компанії «PAL Robotics»; робот здатний виконувати автономну навігацію при змінному складному оточенні, а також розрізняє голоси й упізнає обличчя відвідувачів.[49] |
| 2011 | У листопаді 2011-го компанія «Honda» представила своє друге покоління роботів-гуманоїдів «Honda Asimo Robot». Усі нові «Asimo» є першими роботами із напівавтономними здібностями (наприклад, самі знаходять розетку, коли в них розряджається батарея тощо). |
| 2012 | У квітні цього року Передовий відділ робототехніки (Advanced Robotics Department) Італійського інституту технології представив свою першу версію «CoMan»,[lower-alpha 11] якого було створено спеціально для стабільного переміщення по важким поверхням ґрунту (нерівних дорогах тощо).[50] |
| 2017 | Цього року на Всесвітньому саміті Міжнародного союзу електрозв'язку в Женеві представили нового людиноподібного робота Софію. Її розробила компанія Hanson robotics. Ззовні модель схожа на молоду жінку, яка у своєму арсеналі розпоряджається правдоподібними емоціями. При створенні образу Софії розробники брали за основу зовнішність Одрі Хепберн, британської актриси, фотомоделі, володарки «Оскара». Її голова дуже схожа на голову головної героїні-жінки-робота фільму Ex Machina. Шкіра Софії створена з силікону і має вигляд натуральної. Творці також особливу увагу приділили деталям, оскільки камери в її очах в поєднанні з комп'ютерними алгоритмами дають їй можливість відстежувати осіб, впізнавати людей, встановлювати зоровий контакт. Також завдяки комбінації системи розпізнавання голосу Google Chrome і інших інструментів Софія може з легкістю «розуміти мову» і «говорити».[51] |
| 2020 || В травні компанією Agility Robotics в США презентовано робота Цифра(Digit) для роботи з людьми і в людських просторах. Перших двох роботів придбала компанія Ford Motor Company. Робот оснащений автономною цифровою навігацією, яка здійснюється автоматично завдяки Лідар та іншим датчикам.[52] |-
Див. також
Список деяких відомих людиноподібних роботів:
- Actroid
- AIBO
- Андроїд
- AR-600
- Archie Humanoid Robot
- ASIMO[lower-alpha 12]
- C-3PO
- Choromet
- Cog
- EveR-1
- GuRoo
- Gynoid
- HOAP
- HRP-4C
- reploid
- HUBO
- Ibn Sina Robot
- iCub
- KHR-1
- Kismet
- Meinü
- Nao
- PINO
- Plen
- QRIO
- REEM
- RoboCup
- Robonaut
- RoboSapien
- Roxxxy
- Salvius (robot)
- Shadow Hand
- SIGMO
- Sophia
- TOPIO
- Toyota Partner Robot
- Uncanny valley
- Valkyrie
- Digit
Примітки
- TOPIO («TOSY Ping Pong Playing Robot») — робот-андроїд, розроблений для гри в настільний теніс проти людини. Має зовнішність, що дуже нагадує людську, переміщається на двох ногах. Робота розробила 2005-го року в'єтнамська компанія TOSY (англ.), що займається дослідженнями в царині робототехніки.
- Nao (вимовляється нау) — програмований робот-гуманоїд (автономний робот), якого розробила компанія "Aldebaran Robotics", французька компанія зі штаб-квартирою в Парижі. Розроблено для участи в змаганнях між роботами (зокрема, футбольних).
- Enon — це персональний робот, якого створила японська корпорація "Fujitsu".
- "Plug & Pray" — це документальний фільм 2010-го року, де показано перспективи, проблеми і питання етики штучного інтелекту і роботів. Головними протагоністами є колишній професор Массачусетського політехнічного університету (MIT) Джозеф Вайзенбаум (Joseph Weizenbaum) і вчений-футурист Реймонд Курцвейл (Raymond Kurzweil). У назві фільму гра слів: "Plug & Play" означає "Увімкни і користуйся" (англ. Play — «грай»), це уживаний комп'ютерний вислів; заміна однієї букви ("англ. Pray — «молись») перетворює смисл фрази на «Увімкни і благоговій».
- Осно́ви ро́бототе́хніки (або "парадигми робототехніки") — це зв'язок між трьома ключовими поняттями робототехніки: Сенсорною оцінкою, Плануванням і Дією. Основи робототехніки можна також описати процесом оброблення і проходження сенсорних даних через систему, і процесом прийняття рішень. (Див.: Asada, H. & Slotine, J.-J. E. (1986). Robot Analysis and Control. Wiley. ISBN 0-471-83029-1.
- Пропріоце́пція, пропріореце́пція (від лат. proprius — «власний, особливий» і receptor — «той, що приймає»; від лат. capio, cepi — «приймати, сприймати»), глибока чутливість — відчуття положення частин власного тіла відносно одне одного.
- Тактильний датчик — це сенсор, який чутливий до дотику, сили або тиску.[5]
- Комп'ютерний зір — теорія й технологія створення машин, які можуть проводити спостереження, виявлення і класифікацію об'єктів.
- Zero moment point — це теорія, що пов'язана з принципами динаміки і управління процесами як науковими дисциплінами у вивченні пересування ногами, тобто проблем створення людиноподібних роботів. Відповідно до цієї теорії, існує точка, у якій динамічна сила, що виникає в результаті контакту стопи ноги (маніпулятора робота) з поверхнею приводить тіло в горизонтальне положення (тобто, точка у якій досягається рівновага між вертикальною інерцією і силою тяжіння). Концепція передбачає, що площа контакту є плоскою і має досить високе тертя, щоб запобігти ковзанню ніг по поверхні.
- PKD — перші літери імені "Philip Kindred Dick" (Філіп Дік), відомого американського письменника-фантаста.
- CoMan — від "Compliant huManoid robot → "CoMan")
- ASIMO — перший робот-гуманоїд, який здатний самостійно рухатися.
Джерела
- A Ping-Pong-Playing Terminator. Popular Science.
- Best robot 2009. www.gadgetrivia.com. Архів оригіналу за 24 липня 2010. Процитовано 10 лютого 2013.
- «Nao robot replaces AIBO in RoboCup Standard Platform League». Engadget. 16 August 2007. Retrieved 4 October 2012.
- Plug & Pray, documentary film by Jens Schanze about the future possibilities of AI and robotics.
- Tactile Sensing—From Humans to Humanoids
- Архівована копія. Архів оригіналу за 26 лютого 2013. Процитовано 13 березня 2013.
- Shadow Robot Company: The Hand Technical Specification. Процитовано 9 квітня 2009.
- Джозеф Нідем (1986), Наука і цивілізація в Китаї: Том 2, p. 53, England: Cambridge University Press
- Hero of Alexandria; Bennet Woodcroft (trans.) (1851). Temple Doors opened by Fire on an Altar. Pneumatics of Hero of Alexandria. London: Taylor Walton and Maberly (online edition from University of Rochester, Rochester, NY). Retrieved on 2008-04-23.
- Fowler, Charles B. (October 1967), «The Museum of Music: A History of Mechanical Instruments», Music Educators Journal 54 (2): 45-9
- Rosheim, Mark E. (1994). Robot Evolution: The Development of Anthrobotics. Wiley-IEEE. с. 9–10. ISBN 0-471-02622-0.
- [[Ancient Discoveries]], Episode 11: Ancient Robots. History Channel. Процитовано 6 вересня 2008. Назва URL містить вбудоване вікіпосилання (довідка)
- A Brief History of Robotics
- Архівована копія. Архів оригіналу за 12 вересня 2005. Процитовано 10 лютого 2013.
- Архівована копія. Архів оригіналу за 22 травня 2006. Процитовано 10 лютого 2013.
- Resolved motion rate control of manipulators and human prostheses DE Whitney — IEEE Transactions on Man-Machine Systems, 1969
- [недоступне посилання з квітня 2019]
- Архівована копія. Архів оригіналу за 19 жовтня 2005. Процитовано 10 лютого 2013.
- Архівована копія. Архів оригіналу за 22 січня 2008. Процитовано 10 лютого 2013.
- http://www.fujitsu.com/global/about/rd/200506hoap-series.html
- http://global.kawada.jp/mechatronics/hrp2.html
- Архівована копія. Архів оригіналу за 15 червня 2006. Процитовано 10 лютого 2013.
- Архівована копія. Архів оригіналу за 23 жовтня 2006. Процитовано 10 лютого 2013.
- Архівована копія. Архів оригіналу за 3 березня 2016. Процитовано 10 лютого 2013.
- Архівована копія. Архів оригіналу за 1 жовтня 2009. Процитовано 29 квітня 2019.
- Архівована копія. Архів оригіналу за 1 липня 2007. Процитовано 10 лютого 2013.
- Архівована копія. Архів оригіналу за 14 червня 2010. Процитовано 10 лютого 2013.
- Архівована копія. Архів оригіналу за 4 січня 2012. Процитовано 10 лютого 2013.
- DLR press release 2008. Архів оригіналу за 29 квітня 2014. Процитовано 10 лютого 2013.
- Best Inventions Of 2008. Time. 29 жовтня 2008.
- Архівована копія. Архів оригіналу за 6 серпня 2018. Процитовано 10 лютого 2013.
- http://www.xitome.com/
- Архівована копія. Архів оригіналу за 2 січня 2011. Процитовано 10 лютого 2013.
- Архівована копія. Архів оригіналу за 19 квітня 2010. Процитовано 10 лютого 2013.
- Архівована копія. Архів оригіналу за 9 березня 2012. Процитовано 10 лютого 2013.
- http://www.popsci.com/technology/article/2010-02/nasa-unveils-android-astronaut
- http://uk.news.yahoo.com/18/20100704/twl-iran-unveils-human-like-robot-report-3cd7efd_1.html%5Bнедоступне+посилання+з+квітня+2019%5D
- http://spectrum.ieee.org/automaton/robotics/humanoids/how-to-make-a-robot-dance
- Department of Advanced Robotics, IIT. Архів оригіналу за 5 грудня 2012. Процитовано 10 лютого 2013.
Література
- Asada, H. and Slotine, J.-J. E. (1986). Robot Analysis and Control. Wiley. ISBN 0-471-83029-1.
- Arkin, Ronald C. (1998). Behavior-Based Robotics. MIT Press. ISBN 0-262-01165-4.
- Brady, M., Hollerbach, J.M., Johnson, T., Lozano-Perez, T. and Mason, M. (1982), Robot Motion: Planning and Control. MIT Press. ISBN 0-262-02182-X.
- Horn, Berthold, K. P. (1986). Robot Vision. MIT Press. ISBN 0-262-08159-8.
- Craig, J. J. (1986). Introduction to Robotics: Mechanics and Control. Addison Wesley. ISBN 0-201-09528-9.
- Everett, H. R. (1995). Sensors for Mobile Robots: Theory and Application. AK Peters. ISBN 1-56881-048-2.
- Kortenkamp, D., Bonasso, R., Murphy, R. (1998). Artificial Intelligence and Mobile Robots. MIT Press. ISBN 0-262-61137-6.
- Poole, D., Mackworth, A. and Goebel, R. (1998), Computational Intelligence: A Logical Approach. Oxford University Press. ISBN 0-19-510270-3.
- Russell, R. A. (1990). Robot Tactile Sensing. Prentice Hall. ISBN 0-13-781592-1.
- Russell, S. J. & Norvig, P. (1995). Artificial Intelligence: A Modern Approach. Prentice-Hall. Prentice Hall. ISBN 0-13-790395-2.
Додатково
- Carpenter, J., Davis, J., Erwin‐Stewart, N., Lee. T., Bransford, J. & Vye, N. (2009). Gender representation in humanoid robots for domestic use. International Journal of Social Robotics (special issue). 1 (3), 261‐265.The Netherlands: Springer.
- Carpenter, J., Davis, J., Erwin‐Stewart, N., Lee. T., Bransford, J. & Vye, N. (2008). Invisible machinery in function, not form: User expectations of a domestic humanoid robot. Proceedings of 6th conference on Design and Emotion. Hong Kong, China.
- Williams, Karl P. (2004). Build Your Own Human Robots: 6 Amazing and Affordable Projects. McGraw-Hill/TAB Electronics. ISBN 0-07-142274-9. ISBN 978-0-07-142274-1.
Посилання
