Ізометрія (математика)
Ізометрія, або рух, або (рідше) накладення — бієкція (перетворення), яка зберігає відстань між відповідними точками, тобто якщо і — образи точок і , то . Термін «ізометрія» поширеніший в метричній геометрії, зокрема, в рімановій геометрії. У загальному випадку метричного простору (наприклад, для неплоских ріманових многовидів) рухи можуть існувати далеко не завжди.





Термін «рух» поширеніший в евклідовій геометрії і суміжних галузях.
У евклідовому (або псевдоевклідовому) просторі ізометрія автоматично зберігає також кути, тобто, зберігаються всі скалярні добутки.
Визначення
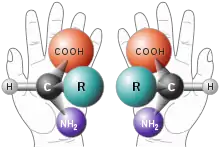
Рух — перетворення простору в себе, за якого зберігається відстань між відповідними точками (умова 1) й зберігаються орієнтації просторових фігур (умова 2). Рух у просторі є обертанням навколо осі, або паралельне перенесення, або гвинтовий рух, тобто обертання навколо декотрої осі з наступним паралельним перенесенням уздовж цієї осі. Якщо за перетворення простору в себе виконується лише перша умова, то це перетворення називається ортогональним. Наприклад, перетворення симетрії площини, за кого змінюється орієнтація фігури (Хіральність (математика)).
Початкові координати точки перетворення до нових координат відбувається за лінійного перетворення:


які можна представити квадратною матрицею з елементами


Ця матриця називається матрицею перетворення. Коефіцієнти задовільняють умові (див. Дельта Кронекера):


та визначник, дорівнює +1. У ортогональних перетвореннях можлива рівність що відрізняє їх від руху.


На площині виділяють два роди руху:
- Рух першого роду, який не виводить з площини й не змінює орієнтації фігур (паралельне перенесення або обертання).
- Рух другого роду, який виводить з площини (переготання площини у просторі) й змінює орієнтацію фігури (симетрія відносно прямої з наступним перенесенням або обертанням).
В разі повороту на кут по годинковій стрілці навколо осі матриця перетворення має вигляд:



Ця матриця є частковим випадком матриці перетворення координат, елементи якої виражені через кути Ейлера Для наведеної матриці



або

Рух першого роду у прямокутній системі координат:

де - координати нового початку, - координати точки (образу), яка відповідає координатам точки (прообразу), - кут між додатним напрямком осі та її образом - віссю







Для руху другого роду:

Види ізометрії в евклідовому просторі
На площині
- Осьова симетрія (відбиття);
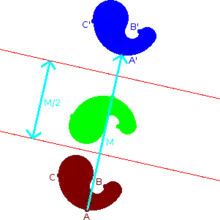
- Паралельне перенесення;
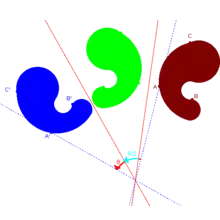
- Обертання;
- Ковзна симетрія — композиція переносу на вектор, що паралельний до прямої, і симетрії цієї прямої.
У тривимірному просторі
- Дзеркальна симетрія (відбиття) щодо площини;
- Паралельний перенос;
- Поворот;
- Ковзна симетрія — композиція перенесення на вектор, що паралельний до площини, і симетрії цієї площини;
- Дзеркальне обертання — композиція повороту навколо деякої прямої і відбиття відносно площини, що перпендикулярна осі повороту;
- Гвинтове накладання — композиція повороту відносно деякої прямої і перенесення на вектор, що паралельний цій прямій.
У n-вимірному просторі
У -вимірному всі просторі рухи зводяться до ортогональних перетворень, паралельних переносів або композицій того й іншого.

У свою чергу ортогональні перетворення можуть бути представлені як композиції (власне) обертань і дзеркальних відбиттів.
Загальні властивості ізометрії в евклідовому просторі
- Композиція ізометрій також є ізометрією.
- Ізометрії щодо композиції утворюють групу.
- Ізометрія — афінне перетворення.
- Ізометрія переводить відрізок у відрізок.
Рухи як композиції симетрій
Будь-яку ізометрію в -мірному евклідовому просторі можна представити у вигляді композиції не більше ніж відбиттів.

Так, паралельний перенос і поворот — композиції двох відбиттів, ковзне відбиття і дзеркальний поворот — трьох, гвинтове накладення — чотирьох.
Див. також
- Хіральність (математика)
- Ізометричні поверхні
- Ізометрична проекція
- Конгруентність
- Просторова група
- Інволюція
- Ізометрія у фізиці
- Перетворення Лоренца — вид ізометрії в чотиривимірному псевдоевклідовому просторі Мінковського
- Теорема тенісної ракетки
