Обертання (математика)
Поверта́ння у геометрії та лінійній алгебрі — рух, який зберігає орієнтацію простору (площини) та має нерухомі точки.

Повертання відрізняється від паралельного перенесення, яке не має нерухомих точок, однак зберігає орієнтацію. Також відрізняється від відбиття, яке змінює орієнтацію, хоча має нерухомі точки. Повертання та інші згадані перетворення є ізометріями; вони залишають незмінними відстані між двома будь-якими точками.
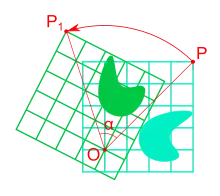
У двовимірному просторі
Достатньо одного кута для визначення обертання на площині - кута обертання. Для обчислення обертання можна використовувати один з двох методів, або матричну алгебру, або комплексні числа.
Матрична алгебра
Для проведення обертання з використанням матриць, точку записують у вигляді вектора, потім множать на матрицю від кута , схожу на:


- .

координати точки після обертання, і можуть бути записані так:




Вектори і мають один і той самий розмір і відокремлені кутом , як і очікувалось.


Комплексні числа
Точку також можна обертати за допомогою комплексних чисел. Множина всіх цих чисел, комплексна площина, геометрично являє собою двовимірну площину. Точка на площині представлена комплексним числом

Обертання точки на кут можна здійснити множенням , розгорнемо формулу використавши формулу Ейлера:


що нам дає такий самий як і раніше результат,
Як і комплексні числа обертання в двовимірному просторі комутативні, на відміну від вищих вимірів. Вони мають тільки одну ступінь свободи, тобто обертання однозначно визначено кутом обертання[1].
У тривимірному просторі
Обертання в звичайному тривимірному просторі суттєво відрізняється від двовимірного обертання. Такі обертання, як правило, не комутативні, тобто, результат двох обертань залежить від порядку їх виконання. Вони мають три ступеня свободи, так само як і розмірність простору.
Тривимірне обертання може бути задано різними способами. Найпопулярніші з них такі:
Матрична алгебра
Матриця використовується для переведення точки (x, y, z) в (x′, y′, z′). Розмір матриці 3 × 3:

Для отримання результату множимо матрицю на вектор, що представляє початкову точку

Матриця є елементом тривимірної ортогональної групи, SO(3), це ортогональна матриця з визначником 1. Через ортогональність рядки матриці є набором ортогональних одиничних векторів (тобто вони є ортонормованим базисом), так само як і стовпці, що полегшує перевірку, чи дійсно це матриця обертання. Якщо ж визначник −1 (матрична група O(3), ), тоді перетворення буде відбиттям або невласним перетворенням.


Матриці часто використовують для перетворень, особливо коли мова йде про велику кількість точок, через те що вони є прямим представленням лінійного відображення. Обертання представленні іншим чином часто переводяться в матричне представлення. Вони можуть бути розширені для представлення обертань і перетворень в однорідних координатах. Перетворення в проективному просторі представленні матрицею 4 х 4, яка не є матрицею обертання, але яке має її в своєму верхньому лівому куті.
Найбільший недолік у використанні матриць — велика кількість обчислень. Особливо це відчувається в системах, де числова стійкість дуже важлива[джерело?].
Ейлерові кути

Один з варіантів узагальнення двовимірного кута — задання трьох кутів обертання (навколо трьох координатних осей). В аеродинаміці ці кути називають крен, тангаж і рискання, а в математиці застосовують термін ейлерові кути. Спосіб має переваги при моделюванні таких фізичних систем як джойстик, легко візуалізується, і це дуже компактний спосіб зберігати інформацію про обертання. Але їх важко використовувати в обчисленнях через те, що навіть такі прості операції, як комбінування обертань, дуже дорогі, також для деяких обертань за трьома кутами неможливо обчислити єдиний вірний варіант (оскільки обертання у тривимірному просторі некомутативні).
Кватерніони
Кватерніон обертання складається з чотирьох чисел, його довжина вважається рівною 1. Це обмежує кількість ступенів свободи трьома ступенями. Кватерніони можна розглядати як узагальнення поняття комплексних чисел за процедурою Келі — Діксона, вони породжують обертання через множення. Але, на відміну від матриць і комплексних чисел, необхідно лише два множення:

У чотиривимірному просторі
- Обертання в псевдоеквлідовому просторі Мінковського задаються перетвореннями Лоренца.
Джерела
- Lounesto, 2001, с. 30.