Марсіанська наукова лабораторія
Mars Science Laboratory (скорочено MSL, Марсіанська наукова лабораторія) — успішна місія НАСА з доставки на Марс й експлуатації марсохода нового покоління «К'юріосіті» (англ. Curiosity — цікавість, допитливість), який оснащено хімічною лабораторією в кілька разів більшою й важчою, ніж у попередніх марсоходів «Спірит» і «Опортьюніті».
| Mars Science Laboratory | |
|---|---|
|
Логотип «Mars Science Laboratory» | |
| Основні параметри | |
| Повна назва | Mars Science Laboratory |
| NORAD ID | MARSCILAB |
| Організація |
NASA |
| Виготівник |
Boeing, Lockheed Martin |
| Оператор |
Лабораторія реактивного руху |
| Тип апарата | Марсохід |
| Дата запуску | 26 листопада 2011 року 15:02:00.211 UTC[1] |
| Ракета-носій | Atlas V 541 № AV-028 |
| Космодром | LC-1SLC-41 Канаверал |
| Схід з орбіти | 5 серпня 2012 |
| Технічні параметри | |
| Маса | 899 кг |
| Потужність | 3 кВт |
| Джерела живлення | РІТЕГ |
| Час активного існування | 2 роки |
| Посадка на небесне тіло | |
| Небесне тіло | Марс |
| Дата і час посадки | 5 серпня 2012 |
| Місце посадки | Кратер Ґейла[2][3][4] |
| Вебсторінка | |
| Вебсторінка | Сайт проекту |
Загальна характеристика
Апарат повинен за кілька місяців пройти від 5 до 20 кілометрів і здійснити повноцінний аналіз марсіанських ґрунтів і компонентів атмосфери. Космічний корабель доставки було обладнано допоміжними ракетними двигунами для точнішої контрольованої посадки, які раніше для спуску марсоходів не використовувалися. Метою експедиції є визначення життєпридатності Марса, вивчення його клімату та планетології, а також збір даних для майбутнього польоту людини на цю планету[5]. У розробці апарату крім НАСА взяли участь також Caltech і JPL. Назву Curiosity було обрано 2009 року шляхом інтернет-голосування серед варіантів, запропонованих школярами.
Запуск апарату до Марса здійснено 26 листопада 2011 року. Він успішно приземлився на Марс 6 серпня 2012 о 05:31 UTC (08:31 за київським часом) у кратері Ґейла[6].
Фахівці американського космічного агентства НАСА вирішили надіслати марсохід у кратер Ґейла. У цій величезній воронці добре проглядаються глибинні шари марсіанського ґрунту, що розкривають геологічну історію червоної планети. Плановий термін служби на Марсі становить 1 марсіанський рік (686 земних днів), однак за сприятливих обставин можна сподіватися набагато довшого терміну.
Завдання та цілі місії
MSL має чотири основні цілі:
- З'ясувати, чи існувало коли-небудь життя на Марсі.
- Отримати докладні відомості про клімат Марса.
- Отримати докладні відомості про планетологію Марса.
- Здійснити підготовку до висадки людини на Марс.
Для досягнення цих цілей перед MSL поставлено вісім основних завдань:
- Виявити та встановити природу марсіанських органічних вуглецевих сполук.
- Виявити речовини, необхідні для існування життя: вуглець, водень, азот, кисень, фосфор, сірку.
- Виявити можливі сліди перебігу біологічних процесів.
- Визначити хімічний склад марсіанської поверхні.
- Встановити процес формування марсіанських каменів і ґрунту.
- Оцінити процес еволюції марсіанської атмосфери в довгостроковому періоді.
- Визначити поточний стан, розподіл і кругообіг води та вуглекислого газу.
- Встановити спектр радіоактивного випромінювання на поверхні Марса.
Характеристики


Космічний апарат складався з трьох модулів — перельотного, посадкового й ровера-марсохода. Маса космічного апарату — 3,4 т, ровера — 930 кг, маса наукової апаратури, встановленої на ровері — 80 кг.
Марсохід К'юрійосіті — 3 метри завдовжки, 2,1 метра заввишки (з розкладеною камерою) і 2,7 метра завширшки. Діаметр коліс становить приблизно 51 сантиметр. Маса марсохода — 900 кілограмів (зокрема, 80 кілограмів дослідницького устаткування).
На поверхні Марса марсохід здатен долати перешкоди до 75 сантиметрів заввишки. Максимальна очікувана швидкість на пересічній місцевості становить 90 метрів на годину у разі автоматичної навігації. Середня ж швидкість становитиме 30 метрів на годину. Очікується, що за час дворічної місії MSL здолає не менше 19 кілометрів.
Конструкція апарату подібна до тих, що застосовувалися раніше — платформа з науковими приладами на шести колесах, кожне з яких має свій електродвигун. Два передні й два задні колеса повертаються, що дозволить апарату розвертатися на 360 градусів на місці. Новий марсохід втричі важчий за попередні марсоходи й набагато дорожчий — коштує 2,3 мільярда доларів. Замість сонячних батарей як джерело енергії використано радіоізотопний термоелектричний генератор (РІТЕГ, англ. Radioisotope thermoelectric generator), що дозволяє позбутися проблеми запилення панелей сонячних батарей і простоїв апарату в нічний час. Обраний багатоцільовий радіоізотопний термоелектричний генератор (англ. Multi-Mission Radioisotope Thermoelectric Generator) нового покоління здатен забезпечувати марсохід енергією протягом 14 років[7].
Порівняння «Mars Science Laboratory» з іншими марсоходами

| К'юріосіті | MER | Sojourner | |
|---|---|---|---|
| Запуск | 2011 | 2003 | 1996 |
| Маса (кг) | 899 | 174 | 10,6 |
| Розміри (В метрах, Д×Ш×В) | 3,1 × 2,7 × 2,1 | 1,6 × 2,3 × 1,5 | 0,7 × 0,5 × 0,3 |
| Енергія (кВт/сол) | 2.5-2,7 | 0,3—0,9 | < 0,1 |
| Наукові інструменти | 10 | 5 | 4 |
| Максимальна швидкість (см/сек) | 4 | 5 | 1 |
| Передача даних (МБ/добу) | 19—31 | 6—25 | < 3,5 |
| Продуктивність (MIPS) | 400 | 20 | 0,1 |
| Пам'ять (МБ) | 256 | 128 | 0,5 |
| Розрахунковий район посадки (км) | 20x7 | 80x12 | 200x100 |
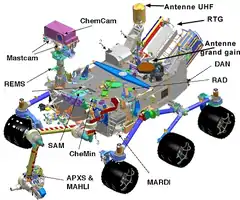
Дослідницькі прилади
.jpg.webp)


.jpg.webp)
Наукові прилади апарату дозволяють ефективно виявляти органічні молекули й визначати їх структуру, а також зондувати товстий шар ґрунту в пошуках слідів води за допомогою нейтронного детектора, створеного Роскосмосом. За допомогою інфрачервоного лазера можна буде видаляти з мінералів зайві нашарування (пил, продукти корозії) й одразу здійснювати лазерний хімічний аналіз на відстані до 10 метрів. «Серце» наукової апаратури — прилад SAM. Він буде визначати хімічний склад ґрунту й шукати в ньому органічні молекули. Цей прилад буде передавати п'яту частку всіх даних з Марса.
Список основних приладів на марсоході:
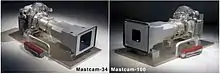
- Три спеціальні камери було розроблено компанією Malin Space Science Systems. Вони використовують однакові компоненти, зокрема модуль обробки зображень, світлочутливі елементи (ПЗС-матриці — 1600x1200 пікселів) та RGB фільтри Байєра
- MastCam: Система складається з двох камер, і містить багато спектральних фільтрів. Можливе отримання знімків в природних кольорах розміром 1600x1200 пікселів та відео з роздільною здатністю 720p (1280x720), апаратною компресією та з частотою до 10 кадрів на секунду. Перша камера (Medium Angle Camera — MAC), має фокусну відстань 34 мм і 15-градусне поле зору, 1 піксель дорівнює 22 см на відстані 1 км. Друга камера (Narrow Angle Camera — NAC) має фокусну відстань 100 мм, 5,1 градусне поле зору, 1 піксель дорівнює 7,4 см на відстані 1 км. Кожна камера має по 8 Гб флеш-пам'яті, яка здатна зберігати більше 5500 необроблених зображень, є підтримка JPEG-компресії й стиснення без втрати якості. В обох камерах є функція автоматичного фокусування, яка дозволяє їм сфокусуватися на об'єктах, від 2,1 м до нескінченності. Незважаючи на наявність у виробника конфігурації з трансфокатором, камери не мають зуму, оскільки часу для тестування не залишалося. Кожна камера має вбудований фільтр Байера RGB і по 8 ІЧ-фільтрів. У порівнянні з панорамної камерою, яка стоїть на «Спірит» і «Опортьюніті» (MER) і отримує чорно-білі зображення розміром 1024 × 1024 пікселів, камера MAC MastCam має кутовий дозвіл в 1,25 рази вище, а камера NAC MastCam - в 3,67 рази вище.
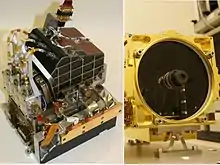
- Mars Hand Lens Imager (MAHLI): складається з камери, закріпленої на роботизованій руці марсохода й застосовується для отримання мікроскопічних зображень гірських порід та ґрунту. Камера отримує зображення розміром 1600x1200 пікселів з роздільною здатністю до 14,5 мкм на піксель. Має фокусну відстань від 18,3 до 21,3 мм і поле зору від 33,8 до 38,5 градусів. Для роботи в темряві є вбудована світлодіодна підсвітка (звичайна біла й ультрафіолетова). Ця камера здатна сфокусуватися на об'єктах від 1 мм. Система може також зробити серію зображень для подальшої обробки знімка. Є можливість зберегти необроблене фото без втрати якості або ж зробити стиснення в JPEG форматі.
- Mars Descent Imager (MARDI) передавала під час спуску на поверхню Марса кольорове зображення розміром 1600x1200 пікселів з витримкою 1,3 мс та з частотою 5 кадрів на секунду. Камера почала зйомку на висоті 3,7 км і закінчила на висоті 5 метрів над поверхнею Марса, зйомка тривала близько 2 хвилин. Містить 8 Гб вбудованої пам'яті, яка може зберігати більше 4000 фотографій. Знімки з камери дозволили побачити навколишній рельєф на місці посадки.
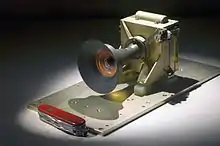
- ChemCam: це набір інструментів дистанційного дослідження, зокрема спектрометр Laser-Induced Breakdown Spectroscopy (LIBS) та камера Remote Micro-Imager (RMI). LIBS генерує 50-75 імпульсів інфрачервоного лазера з довжиною хвилі 1067 нм та загальною тривалістю 5 наносекунд, і фокусується на зразках на відстані до 7 метрів. Прилад аналізує спектр світла, що випромінюється плазмою зразка, у видимому, ультрафіолетовому й ближньому інфрачервоному діапазонах (240–800 нм). RMI-камера використовує оптику LIBS і дозволяє розгледіти об'єкти розмірами від 1 мм на відстані 10 м, поле зору на таких відстанях становить 20 см. ChemCam було розроблено в Лос-Аламоській національній лабораторії та французькій лабораторії CESR. Вартість ChemCam для НАСА становила близько $10 млн, зокрема, перевитрати близько $1,5 млн. Роздільна здатність устаткування в 5-10 разів вища, ніж у встановленого на попередні марсоходи. З семи метрів ChemCam може визначити тип досліджуваної породи (наприклад, вулканічна або осадова), структуру ґрунту й каміння, відстежити домінуючі елементи, розпізнати лід і гідратовані мінерали, дослідити сліди ерозії на каменях і візуально допомогти при дослідженні порід маніпулятором. Інструмент був розроблений Лос-Аламоською національною лабораторією спільно з французькою лабораторією CSR. Розробка була завершена, а обладнання було готове до доставки в JPL в лютому 2008 року.
- Alpha-particle X-ray spectrometer (APXS): рентгенівський спектрометр на альфа-частинках буде опромінювати альфа-частинками зразки й зіставляти спектри в рентгенівських променях для визначення елементного складу породи. Прилад створено Канадським космічним агентством. MacDonald Dettwiler (MDA) - Аерокосмічна канадська компанія, яка будує Canadarm і RADARSAT, несуть відповідальність за проектування і будівництво APXS. До складу команди з розробки APXS входять представники Університету Гвельфів, Університету Нью-Брансвік, Університету Західного Онтаріо, НАСА, Університет Каліфорнії, Сан-Дієго і Корнельського університету.
- Collection and Handling for In-Situ Martian Rock Analysis (CHIMRA): CHIMRA являє собою ківш 4х7 сантиметрів, який зачерпує ґрунт. У внутрішніх порожнинах CHIMRA він просівається через сито з осередком 150 мікрон, чому допомагає робота вібромеханізму, зайве видаляється, а на просіювання відправляється наступна порція. Всього проходить три етапи паркану з ковша і просіювання ґрунту. В результаті залишається трохи порошку необхідної фракції, який і відправляється в ґрунтоприймач, на тілі ровера, а зайве викидається. У результаті з усього ковша на аналіз надходить шар ґрунту в 1 мм. Підготовлений порошок вивчають прилади CHEMIN і SAM.
- CheMin: цей спектрометр досліджує хімічний і мінералогічний склад за допомогою рентгенівського флуоресцентного аналізу й рентгенівської дифракції. Chemin дозволяє визначити велику кількість корисних копалин на Марсі. Інструмент було розроблено Девідом Блейком з Ames Research Center та Лабораторії реактивного руху (англ. Jet Propulsion Laboratory) НАСА. Марсохід буде бурити гірські породи, а отриманий порошок збирається інструментом та опромінюється рентгенівськими променями. Дифракція рентгенівських променів різна для різних мінералів, тому картина дифракції дозволяє визначити структуру речовини. Інформацію про світність атомів і дифракційну картину буде знімати спеціально підготовлена E2V CCD-224 матриця розміром 600х600 пікселів. У "К'юріосіті" є 27 осередків для аналізу зразків, після вивчення одного зразка осередок може бути перевикористаний, але аналіз буде мати меншу точність через забруднення попереднім зразком. Таким чином у ровера є всього 27 спроб для повноцінного вивчення зразків. Ще 5 запаяних осередків зберігають зразки з Землі[8]. Вони потрібні щоб протестувати працездатність приладу в марсіанських умовах. Для роботи приладу потрібна температура -60 градусів Цельсія, інакше будуть заважати перешкоди від приладу DAN.
- Sample Analysis at Mars (SAM): цей вимірювальний комплекс інструментів є найважчим і найбільшим на марсоході, його маса 38 кг, це майже половина маси всіх наукових приладів на борту. SAM було розроблено й зібрано в Goddard Space Flight Center. За допомогою трьох комбінованих сенсорних систем він має відповісти на питання, чи було колись на Марсі середовище, придатне для живих організмів, і чи існує таке середовище на планеті сьогодні. SAM дозволяє аналізувати як тверді зразки, наприклад, зразки ґрунту, так і атмосферний газ, і здатен виявляти та аналізувати органічні сполуки, легкі елементи, а також співвідношення ізотопів у атмосфері. Попередня підготовка зразків відбувається в Sample Manipulation System (SMS), де передбачено численні сита та 74 контейнери. Комплекс має також дві електропечі потужністю 40 Вт із максимальною температурою до 1100 °C, котрі дозволяють виділити леткі речовини з твердих зразків, а також здійснити піроліз органічних сполук. Отриманий газ (чи безпосередньо проба з атмосфери) потрапляє в Chemical Separation and Processing Laboratory (CMPL). Тут є ціла система для подальшої підготовки до вимірювання, що складається з 50 клапанів, 15 вентильних блоків, великої кількості абсорбційних комбінованих фільтрів, змішувачів, сепараторів та насосів. Після такої підготовчої фази газ може бути спрямовано послідовно в один з трьох вимірювальних приладів: газовий хроматограф (GS — Gas Chromatograph), лазерний спектрометр Tunable Laser Spectrometer (TLS) чи квадрупольний мас-спектрометр Quadrupole Mass Spectrometer (QMS). GS використовується для розділення суміші газів на компоненти, які в подальшому спрямовуються на мас-спектрометр QMS. TLS дозволяє точно визначити відношення ізотопів кисню та вуглецю у вуглекислому газі (CO2) та метані (CH4), і, у свою чергу, дозволяє визначити походження цих газів (біологічне або геохімічне)[9][10][11].
- Radiation assessment detector (RAD): він досліджує радіаційний фон усередині марсохода. Зібрані детектором RAD дані на шляху до планети й на поверхні Марса служитимуть для оцінки рівня радіації в майбутніх місіях. Прилад встановлений практично в самому «серці» ровера, і тим самим імітує астронавта, що знаходиться всередині космічного корабля. RAD був включений першим з науково інструментів для MSL, ще на навколоземній орбіті, і фіксував радіаційний фон всередині апарату - а потім і всередині ровера під час його роботи на поверхні Марса. Він збирає дані про інтенсивність опромінення двох типів: високоенергетичних галактичних променів і частинок, що випускаються Сонцем. RAD був розроблений в Німеччині Південно-західним дослідним інститутом (SwRI) позаземної фізики в групі Christian-Albrechts-Universität zu Kiel за фінансової підтримки управління Exploration Systems Mission в штаб-квартирі НАСА та Німеччини.
- Dynamic Albedo of Neutrons (DAN): прилад використовується для виявлення водню, води й льоду на поверхні Марса, складається з імпульсного нейтронного генератора та детектора. Для MSL прилад надано Федеральним Космічним Агентством (Роскосмос). Вартість розробки приладу становила понад $ 3 млн. Є спільною розробкою НДІ автоматики ім. Н. Л. Духова при «Росатомі» (імпульсний нейтронний генератор), Інституту космічних досліджень РАН (блок детектування) і Об'єднаного інституту ядерних досліджень (калібрування ).[12][13] До складу приладу входять імпульсне джерело нейтронів і приймач нейтронного випромінювання. Генератор випромінює в сторону марсіанської поверхні короткі, потужні імпульси нейтронів. Тривалість імпульсу становить близько 1 мкс, потужність потоку - до 10 млн нейтронів з енергією 14 МеВ за один імпульс. Частинки проникають в ґрунт Марса на глибину до 1 м, де взаємодіють з ядрами основних породоутворюючих елементів, внаслідок чого, сповільнюються і частково поглинаються. Частина, що залишилася нейтронів відбивається і реєструється приймачем. Точні виміри можливі до глибини 50 - 70 см. Крім активного обстеження поверхні Червоної планети, прилад здатний вести моніторинг природного радіаційного фону поверхні (пасивне обстеження).[14]
- Rover environmental monitoring station (REMS): Метеорологічний комплекс приладів для вимірювання атмосферного тиску, вологості, напряму вітру, повітряних і наземних температур, ультрафіолетового випромінювання. REMS дасть нові уявлення про місцевий гідрологічний стан, про руйнівний вплив ультрафіолетового випромінювання й про можливі ознаки життя в поверхневому ґрунті планети. Дослідницька група на чолі з Хав'єром Гомес-Ельвіром, Центру астробіології (Мадрид) включає Фінський Метеорологічний інститут як партнера. Встановили її на щоглу камери для вимірювання атмосферного тиску, вологості, напрямку вітру, повітряних і наземних температур, ультрафіолетового випромінювання. Всі датчики розташовані в трьох частинах: дві стріли приєднані до марсоходу, Remote Sensing Mast (RSM), Ultraviolet Sensor (UVS) знаходиться на верхній щоглі марсохода, і Instrument Control Unit (ICU) всередині корпусу.
- MSL entry descent and landing instrumentation (MEDLI): Основною метою приладу було вивчення атмосферного середовища на Марсі під час спуску після гальмування й відокремлення теплозахисного екрану. Саме в цей період були зібрані необхідні дані про марсіанську атмосферу. Ці дані будуть використані в майбутніх місіях. Прилад складається з трьох основних вузлів: MEDLI Integrated Sensor Plugs (MISP), Mars Entry Atmospheric Data System (MEADS) і Sensor Support Electronics (SSE).
- Hazard avoidance cameras (Hazcams): марсохід має дві пари чорно-білих навігаційних камер, розташованих з боків апарату. Вони застосовуються для оцінки небезпеки під час пересування марсоходу і для безпечного наведення маніпулятора на зразки каміння й ґрунту. Камери роблять 3D зображення (поле зору кожної камери — 120 градусів), складають карту місцевості попереду марсохода. Складені карти дозволяють марсоходу уникати випадкових зіткнень і використовуються програмним забезпеченням апарату для вибору необхідного шляху під час подолання перешкод.
- Navigation cameras (Navcams): для навігації марсохід використовує пару чорно-білих камер, які встановлено на щоглі для стеження за пересуванням. Камери мають 45 градусне поле зору, роблять 3D-зображення. Їх роздільна здатність дозволяє бачити об'єкт розміром в 2 сантиметри з відстані 25 метрів.
Запуск
26 листопада 2011 в 15:02:00 UTC (18:02:00 за київським часом) з майданчика LC-1SLC-41 Станції ВПС США «Мис Канаверал» стартовими командами компанії United Launch Alliance за підтримки бойових розрахунків 45 Космічного крила ВПС США здійснено пуск ракети-носія Atlas-5/541 № AV-028 з міжпланетною станцією MSL (Curiosity). Через 44 хвилини 12 секунд після старту станція відокремилася від розгінного ступеня Centaur і вийшла на траєкторію польоту до Марса.
Двоступенева ракета-носій містила центральний блок першої ступені діаметром 3,8 м з двигуном РД-180, чотири твердопаливні блоки і розгінний блок Центавр з головним обтікачем діаметром 5,4 м. Вона здатна виводити до 7982 кг на геостаціонарну орбіту. Atlas-5 також використовувався для запуску Mars Reconnaissance Orbiter і New Horizons.
Перший і другий ступені разом з твердопаливними двигунами було зібрано 9 жовтня неподалік від стартового столу. Головний обтікач з встановленим MSL перевезено на стартовий стіл 3 листопада. Запуск відбувся 26 листопада о 15:02 UTC.
Посадка
Посадковий модуль відокремився від перельотного модуля перед входом в атмосферу. Для гальмування посадкового модуля спочатку використовувався опір атмосфери, потім парашут, і, нарешті, гальмівні двигуни. Сам посадковий модуль не одразу торкнувся поверхні планети — на певній висоті ровер опустився на тросах, які потім від'єдналися, а посадковий модуль відлетів убік, щоб не забруднювати реактивними вихлопами місце посадки ровера. 6 серпня 2012 космічний апарат Curiosity здійснив успішну посадку на Марс у кратері Ґейла. Трансляція посадки в прямому ефірі здійснювалася на сайті NASA.
Посадка апарата на поверхню була унікальною операцією, яку ще ніколи не виконували. Унікальність зумовлена використанням нової технології Sky Crane для посадки апаратів на поверхню.
Система посадки
Спуск на поверхню Марса великої маси дуже складний. Атмосфера занадто розріджена, щоб парашути й аеродинамічне гальмування виявилися ефективними, однак занадто щільна, щоб забезпечити істотне гальмування ракетними двигунами, оскільки використання тяги реактивного струменя на надзвукових швидкостях пов'язане з нестабільністю[джерело?]. Попередні місії використовували аеробалони для пом'якшення удару під час посадки, але новий марсохід занадто важкий для використання такого варіанту.
Curiosity можна порівняти за розміром з автомобілем, оскільки він важить 850 кг — жоден земний апарат таких габаритів ще не висаджувався на планету.
Для посадки легших марсоходів Spirit і Opportunity використовувалася проста схема: парашут і надувна амортизувальна подушка. Однак Curiosity важить більше, ніж обидва ці апарати разом узяті, тому потрібно було розробити нову посадкову систему, що забезпечувала б безпечну посадку значно важчого апарата.
Curiosity виконав спуск на поверхню Марса, використовуючи систему високоточного входу в атмосферу, зниження і посадки (EDL), яка забезпечила потрапляння в межах 20-кілометрового еліпса посадки, на відміну від еліпса 150 км на 20 км систем посадки марсоходів Mars Exploration Rovers (Spirit та Opportunity). Для цього застосовано комбінацію кількох систем у такій послідовності: вхід в атмосферу, зниження й посадка.
Керований вхід в атмосферу
Після відділення капсули з марсоходом від розгінного блоку, вона ввійшла у щільні шари атмосфери Марса зі швидкістю майже 6 км/сек. На цьому етапі спуску марсохід було захищено найбільшим в історії безпілотної космонавтики теплозахисним екраном діаметром 4,5 метра. Він виготовлений з фенольного полімеру з вуглецевим волокном і здатний захистити марсохід від надвисоких температур. Екран також містив особливі вольфрамові циліндри, які пересувають центр ваги капсули для максимальної стійкості. Процес балістичного спуску заздалегідь запрограмований і був повністю автономним.
Спуск з парашутом
На висоті приблизно 7 км спускна капсула розкрила міцний надзвуковий парашут, який сповільнив апарат з орбітальної швидкості до швидкості 100 м/с, після досягнення якої теплозахисний щит було скинуто. Подібні парашути успішно використовувалися ще місіями Вікінг. Діаметр купола парашута становить 16 метрів.
Приблизно на висоті 1,6 км від поверхні від космічного апарату з парашутом відокремились марсохід Curiosity і «небесний кран» (Sky Crane) — спеціальний апарат з ракетними двигунами.
Спуск з використанням тяги двигунів
Як тільки парашут від'єднався, увімкнулися гальмівні ракетні двигуни й новітня інтелектуальна система керованої посадки. Багато в чому вибір майданчика для приземлення залежав від знімків метрової роздільної здатності, зроблених орбітальним зондом Mars Reconnaissance Orbiter (MRO). Спускну капсулу Curiosity оснащено камерою, яка почала зйомку з висоти 3,7 км, звіряючи свої фотографії зі знімками MRO. Дані звірки знімків було використано для управління платформою й посадки в запланованому місці — поряд з 5-км горою в центрі кратера Ґейла.
"Небесний кран"
Момент дотику до поверхні викликав у розробників найбільші труднощі. Гостро постало питання вибору конфігурації ракетної платформи. Якщо розташувати Curiosity на ракетній платформі, то після посадки можуть виникнути серйозні труднощі з виходом на поверхню — марсохід Spirit вже зіткнувся з аналогічними проблемами, коли зламався пандус, яким він мав спуститися на поверхню. З іншого боку, із розміщенням Curiosity «під черевом» ракетної платформи постає проблема впливу на колеса марсохода: удар під час посадки може зламати їх, а вага платформи збільшить навантаження на шасі.
У результаті тривалих розрахунків інженери НАСА створили унікальну систему Sky Crane. Працює вона наступним чином: на висоті 1,8 км Curiosity «випадає» з-під черева посадкової платформи й повисає на міцних нейлонових тросах. Платформа за допомогою ракетних двигунів м'яко опускає марсохід на поверхню й після дотику до ґрунту троси слабшають, від'єднуються, а платформа стрімко набирає висоту, летить убік по параболі й падає на безпечній відстані.
Це може здаватись ризикованою операцією, але інженери НАСА були впевнені в успіху, оскільки на випробуваннях система Sky Crane працювала відмінно. Під час тестів Sky Crane забезпечувала безпрецедентно м'яку посадку.

Як і планувалося, після досягнення поверхні планети, марсохід було поставлено відразу на колеса, а троси було автоматично обрізано.
Перебіг виконання дослідницької програми


Результати
DAN. За перші 100 днів роботи Curiosity ДАН зробив 120 вимірювань, як при русі марсохода, так і під час його зупинок. Приблизно половина вимірів (58 сеансів) була зроблена в активному режимі, половина — в пасивному. Результати дозволяють говорити про двошарову структуру марсіанського ґрунту. Поблизу поверхні лежить сухий шар, завтовшки 20 — 40 см, з вмістом води, що не перевищує 1% по масі, під ним, на глибині до метра, знаходиться ґрунт з відносно високим вмістом води, який значно змінюється вздовж траси руху і в окремих місцях (Rocknest) перевищує 4%. Можливо, що з глибиною вологість продовжує зростати, але прилад ДАН не в змозі отримувати дані з глибини більше 1 м[15].
RAD Радіаційний детектор RAD був включений ще на орбіті Землі в листопаді 2011 року, його вимикали на час посадки, а потім знову ввели в дію на поверхні. Перші результати його роботи були опубліковані ще в серпні 2012 року, проте повний аналіз даних зроблений після 8 місяців досліджень. Наприкінці травня 2013 року в журналі Science була опублікована стаття американських вчених, котрі аналізували роботу радіаційного детектора RAD. За результатами досліджень, вчені дійшли висновку, що учасники пілотованого польоту до Марса отримають потенційно смертельну дозу космічної радіації: понад 1 зіверт йонізуючого випромінювання, дві третини з якого мандрівники отримають під час польоту до Марса (близько 1,8 мілізіверта випромінювання за день)[16] На початку грудня 2013 журналі Science була опублікована стаття американських вчених з Південно-Західного дослідницького інституту, в якій вказується, що за день організм людини або інших живих істот буде накопичувати близько 0,21 мілізіверта йонізуючого випромінювання, що в десятки разів більше, ніж аналогічні значення для Землі. Як відзначають автори статті, це значення всього в 2 рази менше, ніж рівень радіації у відкритому космосі, виміряний під час польоту Curiosity від Землі до Марса.
У загальній складності, за рік життя на Марсі організм людини поглине близько 15 рентген іонізуючого випромінювання, що в 300 разів більше граничної річної дози для працівників атомної промисловості. Ця обставина встановлює граничний безпечний термін перебування людей на Марсі без ризику для здоров'я — 500 днів[17]
Крім того, отримані за допомогою RAD експериментальні дані дозволяють припустити, що безпосередньо на поверхні Марса пошук ознак життя буде малоперспективним, за деякими даними найкраща глибина для пошуків становить близько 1 метра. Проте, детальне дослідження показало, що, хоча складні сполуки подібні до білків на глибині 5 см схильні повного знищення за термін у кілька сотень мільйонів років, більш прості сполуки з атомною масою менше 100 а.о. м. можуть зберігатися в таких умовах до понад 1 млрд років і можуть бути виявлені MSL[18]
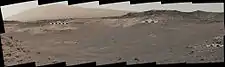
Ровером Curiosity одержані докладні світлини поверхні Марса[19].
Цікаві факти
- Невдовзі після запуску Mars Science Laboratory мала випередити в польоті іншу місію на Марс — «Фобос-Ґрунт» (НВО ім. Лавочкіна, Роскосмос), запуск якої відбувся 8 листопада 2011, а прибуття до Марса планувалося на 1 — 2 місяці пізніше, ніж Mars Science Laboratory. Однак «Фобос-Ґрунт» не вийшов на розрахункову міжпланетну орбіту через нештатну ситуацію й згодом згорів у щільних шарах атмосфери Землі.
- 5 серпня 2013 року виповнився рік з того моменту, як марсохід спустився на поверхню Марса і почав свою роботу. За цей рік апарат пройшов відстань 1,6 км, передав на Землю майже 24 гігабайти інформації, відправив 36 700 повнорозмірних фотографій, зробив 75 000 лазерних імпульсів для дослідження навколишнього простору та зібрав і проаналізував зразки порід двох гірських масивів.
Примітки
- Стан місії Mars Science Laboratory (англ.)
- Webster, Guy; Brown, Dwayne (22 липня 2011). NASA's Next Mars Rover To Land At Gale Crater. NASA JPL. Архів оригіналу за 16 липня 2013. Процитовано 22 липня 2011.
- Chow, Dennis (22 липня 2011). NASA's Next Mars Rover to Land at Huge Gale Crater. Space.com. Архів оригіналу за 16 липня 2013. Процитовано 22 липня 2011.
- Amos, Jonathan (22 липня 2011). Mars rover aims for deep crater. BBC News. Процитовано 22 липня 2011.
- Overview. JPL. NASA. Архів оригіналу за 17 серпня 2012. Процитовано 27 листопада 2011.
- Curiosity здійснив посадку на Марс rbc.ua, 06.08.2012
- Space Radioisotope Power Systems Multi-Mission Radioisotope Thermoelectric Generator. Міністерство енергетики США. Архів оригіналу за 16 липня 2013. Процитовано 19 січня 2013.(англ.)
- MSL Science Corner: Chemistry & Mineralogy (CheMin). NASA/JPL. Архів оригіналу за 5 листопада 2012. Процитовано 22 грудня 2014.
- Nasa.gov — MSL Science Corner: Sample Analysis at Mars (SAM)
- Nasa.gov — Sample Ananlysis at Mars on the rover Curiosity
- Space Science Reviews, The Sample Analysis at Mars Investigation and Instrument Suite, DOI: 10.1007/s11214-012-9879-z 2012[недоступне посилання з листопадаа 2019]
- ФЕДЕРАЛЬНОЕ КОСМИЧЕСКОЕ АГЕНТСТВО (РОСКОСМОС)| Российский нейтронный детектор ДАН для проекта мобильного посадочного аппарата НАСА «Марсианская научная лаборатория»
- Лаборатория космической гамма-спектроскопии — ДАН
- Журнал Новости Космонавтики — Журнал
- http://novosti-kosmonavtiki.ru/mag/2013/734/4545/ novosti-kosmonavtiki
- title=НАСА: мандрівники до Марса отримають гранично високу дозу радіації
- Вчені опублікували перші оцінки рівня радіації на поверхні Марса
- pdf/2933.pdf DEGRADATION OF THE ORGANIC MOLECULES IN THE SHALLOW SUBSURFACE OF MARS DUE TO IRRADIATION BY COSMIC RAYS . A. A.Pavlov, G. Vasilyev, V. M. Ostryakov, A. K. Pavlov and P. Mahaffy, NASA Goddard Space Flight Center, Laboratory of Mass Sectrometry, Ioffe Physico — Technical Institute of Russian Academy of Sciences, St. Petersburg, Russia
- Мапа Марса на основі світлин ровера Curiosity
Посилання
- Мікроблоґ команди MarsCuriosity на Твітері
- Мікроблоґ команди MSL на Твітері
- Curiosity construction webcam
- Марсохід «Допитливість»: хроніка посадки (Оновлюється постійно)
Див. також
- Космічна біологія
- Автономний робот
- Клімат Марса
- ЕкзоМарс
- Місії на Марс
- Гологія Марса
- InSight
- Життя на Марсі
- Список штучних об'єктів на Марсі
- Mars Exploration Rover
- Марс-експрес
- Марс Одіссей
- Mars Pathfinder
- Mars Reconnaissance Orbiter
- Місія Mars 2020 rover
- Марсохід «Опортюніті»
- Дослідження космосу
- Програма «Вікінг»
- Хронологія подій Марсіанської наукової лабораторії
- Марсохід «Спіріт»
- Програма Дослідження Марса
