Оппортьюніті
Оппортьюніті (англ. Opportunity — слушна нагода, сприятлива можливість, нагода[1]), MER-B (Mars Exploration Rover — B) — другий марсохід космічного агентства NASA з двох запущених у рамках проекту Mars Exploration Rover.


Було запущено із Землі 7 липня 2003 року. Посадка на Марс спускного апарату відбулося 25 січня 2004 року. Було заплановано, що місія «Оппортьюніті» на Марсі буде тривати 90 сол (92,5 земних діб). Однак апарат пропрацював до 10 червня 2018 року, коли від нього було отримано останній сигнал. Загалом на Марсі «Оппортьюніті» пропрацював 5352 сол (5498 земних днів від посадки до завершення місії, тобто 15 земних років та 8 місяців. За цей час апарат подолав по поверхні Марса відстань 45,16 км. 13 лютого 2019 року НАСА офіційно оголосило про завершення проекту.[2][3][4] «Оппортьюніті» став апаратом, який найдовше пропрацював на Марсі. Попередній рекорд належав апарату Вікінг-1, який пропрацював з 1976 по 1982.
Походження назви
Назву марсохід отримав за результатами традиційного конкурсу НАСА. Її у 2003-му році запропонувала 9-річна дівчинка російського походження Софі Колліс, що народилася в Сибіру; її удочерила американська сім'я Колліс (Collis) з Аризони[1].
Мета місії

Основним завданням місії було вивчення осадових порід, які, як передбачалося, мали утворитися в кратерах (Гусєва, Еребус) і суміжних, де колись могло бути озеро або море. Однак класичні осадові породи знайдені не були, в кратері в основному зустрічалися породи вулканічного походження.
Перед місією марсоходу були поставлені такі наукові цілі:[5]:
- Пошук і опис розмаїття гірських порід і ґрунтів, які свідчать про минулу водну активність планети. Зокрема, пошук зразків з вмістом мінералів, які відкладалися під впливом опадів, випарювання, осадження або гідротермальної активності.
- Визначення поширення і складу мінералів, гірських порід і ґрунтів, які оточують місце посадки.
- Визначити які геологічні процеси на Марсі сформували рельєф місцевості і хімічний склад. До цих процесів можуть належать: водна або вітрова ерозія, відкладення осадів, гідротермальні механізми, вулканізм та утворення кратерів.
- Проведення калібрування та перевірки спостережень за поверхнею, зроблених за допомогою інструментів Марсіанського розвідувального супутника. Це допоможе визначити точність і ефективність різних інструментів, які використовуються для вивчення марсіанського геології з орбіти.
- Пошук залізовмісних мінералів, виявлення і кількісна оцінка відносних величин за певними типами мінералів, що містять воду або були сформовані у воді, таких як залізовмісні карбонати.
- Кваліфікація мінералів і геологічних текстур і визначення процесів, які їх утворили.
- Пошук геологічних причин, що сформували ті умови навколишнього середовища, які існували, коли на планеті була присутня рідка вода. Оцінка того, наскільки дані умови були сприятливі для життя на Марсі.
Ракета-носій

Опортуніті був запущений ракетою-носієм Дельта-2 7925-H. Ця ракета-носій потужніша, ніж Дельта II 7925, за допомогою якої був запущений його близнюк — марсохід Спіріт.
Запуск Оппортьюніті відбувся пізніше, ніж запуск його близнюка — марсохода Спіріта, Марс перебував на більшій відстані, і тому для успішної доставки вимагалося більше енергії, у зв'язку з цим обрали потужнішу ракету Дельта-2 7925-H. Попри це, основні елементи ракети-носія Delta-2 для місії Mars Exploration Rovers, були практично ідентичні. На старті ракета-носій важила 285 228 кг, з яких 1063 кг — космічний корабель (див. Таблицю нижче).
Сімейство ракет-носіїв Delta-2 перебуває в експлуатації вже більш ніж 10 років. З їх допомогою успішно запущені 90 проектів, в тому числі й останні шість місій НАСА на Марс: «Mars Global Surveyor» і «Mars Pathfinder» в 1996 році, «Mars Climate Orbiter» 1998 року, «Mars Polar Lander» в 1999 році, «Марс Одіссей» 2001 року і «Фенікс» в 2007 році.[6].
Вироблення енергії
Як і в місії «Mars Pathfinder», електроенергію, необхідну для живлення систем марсоходів, виробляють панелі сонячних батарей. Панелі сонячних батарей містяться на «крилах» марсоходів і складаються з окремих осередків, що значно підвищує надійність місії. Їх розробляли спеціально для «Спіріта» і «Оппортьюніті», щоб досягнути максимальну площу збирання світла, наскільки це можливо (див. Знімок ліворуч).
Ще одним нововведенням для марсоходів є додавання потрійного шару з арсеніду галію. Це перше в історії дослідження Марса з використанням тришарових сонячних батарей. Осередки батарей здатні поглинути більше сонячного світла, ніж їх застаріла версія, встановлена на марсоході «Соджорнер», який працював у 1997 році. Сонячні елементи містяться в трьох шарах сонячних батарей марсохода і тому здатні поглинути більше сонячного світла, а внаслідок цього можуть виробляти більше електроенергії для підзарядки літій-іонних акумуляторів роверів.
Під час місії «Mars Pathfinder» марсохід «Соджорнер» використав один літієвий акумулятор ємністю 40 А·год. Під час місії «Mars Exploration Rovers» марсоходи використовують два літій-іонних акумулятора, ємністю 8 А·год кожен. Під час роботи «Оппортьюніті» на Марсі максимальний показник виробітку енергії сонячними панелями був близький до 900 Вт·год за 1 марсіанський день, або сол. В середньому сонячні батареї «Спіріта» і «Оппортьюніті» виробляли 410 Вт•год/сол.
Зв'язок з орбітальними апаратами

Марсоходи місії «Mars Exploration Rovers» як ретранслятор використовують орбітальний апарат «Марс Одіссей», який постійно обертається навколо червоної планети.
Протягом 16 хвилин він перебуває в зоні «спілкування» з роверами, після чого ховається за горизонтом. «Спіріт» і «Оппортьюніті» можуть «спілкуватися» з орбітальним апаратом протягом 10 хвилин, в цей період він приймає дані від марсоходів.[7]
Переважна більшість наукових даних передаються на Землю через антену ровера, яка використовується для спілкування з орбітальним апаратом «Марс Одіссей» в дециметровому діапазоні (UHF). «Марс Одіссей» ретранслював на землю основний обсяг наукових даних, отриманих з обох марсоходів. Інший орбітальний апарат, «Mars Global Surveyor», також використовувався як ретранслятор; він передав близько 8 % всіх даних, перш ніж вийшов з ладу в листопаді 2006 року, після 10 років роботи. Невеликий обсяг даних був переданий безпосередньо з роверів на Землю через антену X-діапазону[7].
Орбітальні апарати з потужними антенами X-діапазону здатні передавати на Землю дані з більш високою швидкістю. Швидкість передачі не висока, тому для її збільшення побудували Комплекс далекого космічного зв'язку в Канберрі, діаметр головної параболічної антени якого становить 70 метрів.
Зв'язок з перелітним модулем
На перелітному модулі було встановлено дві антени, необхідні для підтримки зв'язку з Землею. Всеспрямовану антену з низьким коефіцієнтом посилення використовували, коли корабель перебував поруч із Землею. У зв'язку з тим, що вона посилає сигнал у всіх напрямках, їй не потрібно наводитися на Землю, щоб перемикнутися на інший канал зв'язку. Після цього в справу вступає гостронаправлена антена з середнім коефіцієнтом посилення, для успішної роботи вона повинна бути спрямована у бік Землі. Антена мала гостру діаграму спрямованості, оскільки в польоті відстань до Землі поступово збільшувалась.
Конструкція марсохода
Всі системи марсохода залежать від потужного блоку під назвою «Мозковий центр», який значною захищений від впливів на нього низьких температур. У центрі ровера міститься важливий «Тепловий блок електроніки», який відповідає за пересування ровера, а також за розгортання маніпулятора. Бортовий комп'ютер приблизно такої ж потужності, як і портативний комп'ютер. Пам'яті приблизно в 1000 разів більше, ніж у його попередника — марсохода «Соджорнер».[8]
Бортовий комп'ютер «Спіріта» і «Оппортьюніті» побудований на 32-бітному радіаційно-стійкому процесорі RAD6000, який працює на частоті 20 МГц. Він містить 128 мегабайт оперативної пам'яті, а також 256 мегабайт флеш-пам'яті.
Подібно до нашого мозку, який перебуває під захистом черепа, системи марсохода захищені тим, що встановлені в «Тепловому блоці електроніки», який закріплений в модулі під назвою «Електроніка марсохода». Цей модуль розташований точно в центрі ровера. Золота плівка на стінках блоків допомагає затримувати виділене тепло від обігрівачів, оскільки нічні температури на Марсі можуть впасти до -96 ° C. Термоізоляцією служить шар з аерогеля. Аерогель — унікальний матеріал, що володіє рекордно низькою щільністю й проявляє високу твердість, прозорість, жароміцність, надзвичайно низьку теплопровідність і т. д. В повітряному середовищі при нормальних умовах щільність такої мікроґратки дорівнює 1,9 кг/м³ через наявність міжґраткового повітря, а його щільність всього в 1,5 рази більша ніж щільність повітря, через що аерогель отримав назву «твердий дим».
Весь комплекс, що контролює балансування ровера, можна порівняти з пристроєм людського вестибулярного апарату. Інерціальний вимірювальний пристрій оцінює кут нахилу марсохода, ці дані допомагають роверу робити точніші й плавніші рухи.
Головний комп'ютер проводить також регулярне технічне обслуговування марсохода. Його програмне забезпечення забезпечує правильне функціонування всіх систем.
Осторонь від небезпек
Марсоходи місії «Mars Exploration Rovers» мають систему контролю за небезпечними зонами, у зв'язку з чим під час пересування ровери можуть успішно їх уникати. Реалізація даної системи є першою в історії вивчення Марса, її розробили в Університеті Карнегі-Меллона.
Дві інші подібні програми були об'єднані в одне програмне забезпечення з метою підвищення загальної продуктивності. Перша слідкує за контролем роботи двигуна, управляє колесами марсоходу, щіткою, а також інструментом вишкрібання породи (RAT). Друга (працює постійно, як вдень, так і вночі) стежить за роботою сонячних батарей ровера, перенаправляє енергію до двох акумуляторів, а також управляє годинником Марсохода[9].
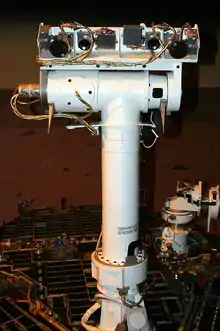
Поліпшений зір
Загалом двадцять камер, що допомагають марсоходам в пошуку слідів дії води на Марсі, передають на Землю якісні фотографії планети. Камери місії «Mars Exploration Rovers» роблять знімки з найбільшою роздільною здатністю за всю історію досліджень Марса.
Досягнення в галузі технологій допомогло зробити камери легшими і компактнішими, що дозволило встановити по дев'ять камер на кожному ровері, а також по одній камері на спускну платформу (DIMES). Камери роверів розроблені в Лабораторії реактивного руху. Вони є найдосконалішими камерами, які колись опускалися на іншу планету.
Поліпшене стиснення даних
Система стиснення даних, також розроблена в Лабораторії реактивного руху, дозволяє зменшувати обсяг даних для подальшої передачі їх на Землю. ICER створений на основі вейвлет-перетворень, зі здатністю обробляти зображення. Наприклад, зображення розміром 12 МБ в кінцевому підсумку буде стиснуте до 1 МБ і, таким чином, займе набагато менше місця на карті пам'яті. Програма ділить всі зображення на групи, по 30 зображень кожна. Ця процедура істотно знижує ризик втрати знімків під час їх відправлення на Землю, до Комплексу далекого космічного зв'язку в Австралії.
Створення карт місцевості при пересуванні
Також інновацією для цієї місії є можливість створювати карти прилеглої місцевості. Для наукової групи це дуже цінно, оскільки карти дозволяють визначити прохідність, кут нахилу, а також сонячну фазу. Стереознімки дозволяють команді створювати 3D-зображення, що дає можливість точно визначати місце розташування спостережуваного об'єкта. Карти, розроблені на основі цих даних, дозволяють команді знати, як далеко роверу потрібно проїхати до необхідного об'єкта, вони також допомагають наводити маніпулятор.
Покращений парашут і подушки безпеки
Для входу в атмосферу, спуску і посадки в місії «Mars Exploration Rovers» було використано багато чого з напрацювань її попередників: Місії «Вікінг» і «Mars Pathfinder» . Для того, щоб уповільнити швидкість зниження, місія використовує успадковану технологію парашута Місії «Вікінг» запущеного 1975 року, а також місії Місії Mars Pathfinder 1997 року. Космічні апарати місії «Mars Exploration Rovers» набагато важчі від попередніх, базова конструкція парашута залишилася тією ж, але його площа на 40 % більша, ніж у попередників.
Подушки безпеки також були вдосконалені, дану технологію пом'якшеного приземлення апарату застосовували в місії «Mars Pathfinder». Навколо посадкового модуля, який тримав марсохід, перебували двадцять чотири надутих осередки. Подушки безпеки створені з дуже міцного синтетичного матеріалу, званого «Vectran». Цей самий матеріал використовують у виготовленні скафандрів. Знову ж таки, зі збільшенням ваги космічного апарату, необхідно було створити міцніші подушки безпеки. Кілька тестів на падіння показали, що додаткова маса викликає серйозні пошкодження і розрив матеріалу. Інженери розробили подвійну оболонку з подушок безпеки, покликану запобігти серйозним пошкодженням під час високошвидкісної посадки, коли подушки безпеки можуть стикнутися з гострим камінням та іншими геологічними особливостями Червоної планети.
Використання ракетних двигунів щоб уповільнити швидкість зниження
Щоб сповільнити спуск космічного апарату, використовувалися три реактивних двигуни (RAD), розташованих по його боках. Радіолокаційна установка (РЛС), встановлена в нижній частині посадкового модуля, визначала відстань до поверхні. Коли спускний апарат був на висоті 1,5 км, радіолокаційна система привела в дію камеру Descent Image Motion Estimation Subsystem (DIMES). Камера зробила три фотографії поверхні (із затримкою 4 секунди), що дозволило автоматично визначити горизонтальну швидкість апарата. Через деякий час нова рухова установка місії «Mars Exploration Rovers» почала гальмувати марсохід «Спіріт». Як і передбачалося, у кратері Гусєва дмуть сильні вітри, які розгойдували спускний апарат «Спіріта» з боку в бік, перешкоджаючи його безпечній посадці. Векторна система з реактивних двигунів (TIRS) перешкоджала хаотичному руху з боку в бік, в результаті чого спускний апарат став стабільнішим при посадці. Під час спуску «Оппортьюніті» на Плато Меридіана була більш сприятлива погода, ніж в кратері Гусєва, тому в цьому випадку не було необхідності залучити систему TIRS для стабілізації спуску.
Покращена мобільність марсохода
Нове програмне забезпечення допомагає уникати перешкод при пересуванні. Коли зіткнення з породою неминуче, в спрацьовує вдосконалена система підвіски, з якою роверу набагато легше здійснювати маневри[11].
«Спіріт» і «Оппортьюніті» мали здатність долати різні перешкоди на кам'янистій місцевості Марса. Для місії «Mars Exploration Rovers» конструктори модифікували систему підвіски, яку раніше застосовували на марсоході «Соджорнер»[11].
Система підвісок закріплена в задній частині марсохода. Колеса збільшили в розмірах, а також покращили їх конструкцію. Кожне колесо має діаметр 26 сантиметрів. Їх внутрішню і зовнішню частину з'єднує спеціальна спіралевидна структура, яка дозволяє поглинути силу удару і не допустити її поширення. Система підвісок дозволяє краще долати перешкоди, наприклад, камені, які можуть бути більшими ніж самі колеса. Кожне колесо має протектор з характерними виступами, які забезпечують поліпшене зчеплення під час пересування по каменях і м'якому ґрунту. Внутрішня частина коліс складається з матеріалу під назвою «Solimide», який зберігає свою еластичність навіть при дуже низьких температурах і тому ідеально підходить для суворих умов Марса.
Пересування по шляхах найменшого опору
Марсоходи місії «Mars Exploration Rovers» мають кращі фізичні характеристики, ніж марсохід «Соджорнер» 1997 року, тому «Спіріт» і «Оппортьюніті» можуть бути більш автономними. Інженери поліпшили авто-навігаційне програмне забезпечення водіння, що включає можливість робити і використовувати тривимірні карти місцевості, а це робить ровери самостійнішими[11].
Коли роверу дають команду на самостійне пересування, він починає аналізувати довколишню місцевість, після цього робить стереозображення, за допомогою якого вибирає найкращий безпечний маршрут. Марсоходи повинні уникати будь-які перешкоди на своєму шляху, тому ровери розпізнають їх на своїх стереознімках. Ця інновація дозволила пересуватися на довші відстані, ніж за ручної навігації з Землі. Станом на середину серпня 2004 марсохід «Оппортьюніті», використовуючи автоматичну самонавігацію, проїхав 230 метрів (третина відстані між кратером Ігл і кратером Витривалість), марсохід «Спіріт» — більш ніж 1250 метрів із запланованих 3000 метрів шляху до «Пагорбів Колумбії».
Автоматична система навігації робить знімки прилеглої місцевості, використовуючи одну з двох стереокамер. Після цього стереозображення перетворюються в тривимірні карти місцевості, які автоматично створюються програмним забезпеченням ровера. Програмне забезпечення визначає, чи безпечна місцевість, яка ступінь прохідності, висота перешкод, щільність ґрунту і кут нахилу поверхні. З десятків можливих шляхів ровер вибирає найкоротший, найбезпечніший шлях до своєї мети. Потім, проїхавши від 0,5 до 2 метрів (в залежності від того, скільки перешкод трапиться на його шляху), ровер зупиняється, аналізуючи перешкоди, що перебувають неподалік. Весь процес повторюється, поки він не досягне своєї мети або ж поки йому не накажуть зупинитися з Землі.
Програмне забезпечення водіння в місії «Mars Exploration Rovers» досконаліше, ніж у «Соджорнер». Система безпеки «Соджорнер» могла захоплювати тільки по 20 точок на кожному кроці; система безпеки «Спіріта» і «Оппортьюніті» зазвичай захоплює більш як 16000 точок. Середня швидкість роверів, з урахуванням ухилення від перешкод, становить близько 34 метри на годину — в десять разів швидше, ніж у «Соджорнер». За всі три місяці своєї роботи «Соджорнер» проїхав трохи більш як 100 метрів. «Спіріт» і «Оппортьюніті» перевершили цей рекорд в один і той самий день; «Спіріт» проїхав 124 метра за 125 сол, а «Опортуніті» проїхав 141 метр за 82 сол.
Ще одна інновація в місії «Mars Exploration Rovers» — це додавання візуального одометра, який перебуває під контролем програмного забезпечення. Коли ровер їде по піщаній або кам'янистій ділянці, то його колеса можуть прослизати і внаслідок цього видавати неправильні покази механічного одометра. Візуальний одометр допомагає виправити ці значення, показуючи, як далеко насправді проїхав марсохід. Він працює шляхом порівняння знімків, зроблених до і після короткої зупинки, автоматично знаходячи десятки примітних об'єктів (наприклад: камені, сліди від коліс і піщаних дюн), відстежуючи відстань між послідовно знятими зображеннями. Об'єднання їх у тривимірні знімки надає набагато більше інформації — все це набагато легше і точніше, ніж підрахунок пройденої відстані за кількістю обертів колеса.
Батареї та обігрівачі
Обігрівачі, акумулятори та інші компоненти не здатні вижити в холодні марсіанські ночі, тому вони знаходяться в «Тепловому блоці електроніки». Нічна температура може впасти до -105 ° C. Температура акумуляторів повинна бути вище -20 ° C, коли вони живлять системи марсохода, і вище 0 ° C при їх підзарядці. Обігрів «Теплового блоку електроніки» відбувається від електричних і восьми радіоізотопних обігрівачів, а також від тепла, що виділяє сама електроніка.[12]
Кожен радіоізотопний обігрівач виробляє близько одного вата тепла і містить близько 2,7 г діоксиду плутонію в гранулах, що за формою і розміром нагадують ластик на торці простого олівця. Кожна гранула укладена в металеву оболонку з плутонієво-родієвого сплаву і оточена декількома шарами вуглецево-графітових композитних матеріалів, що весь блок за розміром і формою нагадує C-елементний акумулятор. Ця конструкція з декількох захисних шарів була протестована, причому діоксид плутонію знаходиться всередині обігрівальних елементів, що значно знижує ризик забруднення планети при аварійному руйнуванні марсохода під час посадки. Інші космічні апарати, в тому числі «Марс Пасфайндер» і марсохід «Соджорнер», для підтримки оптимальної температури електроніки використовували тільки радіоізотопні обігрівачі[12].
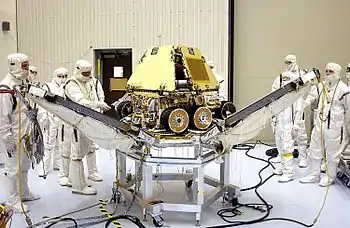
Конструкція



Автоматична міжпланетна станція проекту MER включає спускний апарат і перелітний модуль. Для різних етапів гальмування в атмосфері Марса і м'якої посадки спускний апарат містить теплозахисний екран конічної форми, парашутну систему, твердопаливні ракетні двигуни і кулясті повітряні подушки.
| Основні складові | Компонент | Маса | Доповнення |
|---|---|---|---|
| Перелітний модуль | 243 кг | включаючи 50 кг палива | |
| Спускний апарат | Теплозахисний екран | 78 кг | |
| Задній екран і парашут | 209 кг | ||
| Посадкова платформа | 348 кг | ||
| Всього | 878 кг | ||
| Марсохід | 185 кг | ||
| Сумарна маса | 1063 кг |
Марсохід має 6 коліс. Джерелом електроенергії служать сонячні батареї потужністю до 140 ватів[13]. При масі в 185 кг марсохід оснащений буром, декількома камерами, мікрокамерою (MI) і двома спектрометрами, змонтованими на маніпуляторі.[14][15]
Поворотний механізм марсохода виконаний на основі сервоприводів. Такі приводи розташовані на кожному з передніх і задніх коліс, середня пара поворотних приводів не має. Поворот передніх і задніх коліс марсохода здійснюється за допомогою електромоторів, що діють незалежно від моторів, які забезпечують переміщення апарату.
Коли марсоходу необхідно повернути, двигуни включаються і повертають колеса на потрібний кут. Весь інший час двигуни, навпаки, перешкоджають повороту, щоб апарат не збивати з курсу через хаотичний рух коліс. Перемикання режимів поворот — гальмо відбувається за допомогою реле.
Також марсохід здатний копати ґрунт (траншею), обертаючи одне з передніх коліс, сам залишаючись при цьому нерухомим.
Бортовий комп'ютер побудований на процесорі RAD6000 з частотою 20 МГц, 128 МБ динамічної оперативної пам'яті, 3 МБ EEPROM і 256 МБ флеш-пам'яті. Робоча температура робота від мінус 40 до плюс 40 ° C. Для роботи при низьких температурах призначений радіоізотопний нагрівач, який можуть доповнювати також електричні нагрівачі, коли це необхідно.[16] Для теплоізоляції застосовується аерогель і золота фольга.
Інструменти ровера:
- Панорамна камера (Pancam) — допомагає вивчити структуру, колір, мінералогію місцевого ландшафту.
- Навігаційна камера (Navcam) — монохромна, з великим кутом огляду, також камери з нижчою роздільною здатністю, для навігації та водіння.
- Мініатюрний тепловий емісійний спектрометр (Mini-TES) — вивчає скелі й ґрунт, для докладнішого аналізу, також визначає процеси, які сформували їх.
- Hazcams, дві монохромні камери з 120-градусним полем зору, що забезпечують додаткові дані про стан ровера.
Маніпулятор ровера містить наступні інструменти:
- Мініатюрізованний месбауерський спектрометр (MB) MIMOS II — проводить дослідження мінералогії залізовмісних порід і ґрунтів.
- Спектрометр альфа-частинок (APXS) — аналіз хімічного складу скель і ґрунтів.
- Магніти — збір магнітних частинок пилу.
- Мікрокамера (MI) — отримує збільшені зображення марсіанської поверхні з високою роздільною здатністю, своєрідний мікроскоп.
- Інструмент зіскоблювання породи ( en: Rock Abrasion Tool, RAT; букв. Переклад абревіатури — «щур») — алмазний торцевий бур, здатний зробити отвір діаметром 45 мм і глибиною 5 мм на скельній поверхні, а потім змести залишки породи з місця зіскрібка. Інструмент важить 720 грам, споживає потужність 30 Вт.
Роздільна здатність камер 1024×1024 пікселів. Отримані дані зберігаються із стисненням ICER для подальшої передачі.
Порівняння Оппортьюніті з іншими марсоходами

| К'юріосіті | MER | Соджорнер | |
|---|---|---|---|
| Запуск | 2011 | 2003 | 1996 |
| Маса (кг) | 899 | 174 | 10,6 |
| Розміри (в метрах, Д×Ш×В) | 3,1 × 2,7 × 2,1 | 1,6 × 2,3 × 1,5 | 0,7 × 0,5 × 0,3 |
| Енергія (кВт•г/сол) | 2.5-2,7 | 0,3—0,9 | < 0,1 |
| Наукові інструменти | 10 | 5 | 4 |
| Максимальна швидкість (см/сек) | 4 | 5 | 1 |
| Передача даних (МБ/добу) | 19—31 | 6—25 | < 3,5 |
| Продуктивність комп'ютера (MIPS) | 400 | 20 | 0,1 |
| Оперативна пам'ять (МB) | 256 | 128 | 0,5 |
| Розрахунковий район посадки (км) | 20×7 | 80×12 | 200×100 |
Огляд місії
Основне завдання Оппортьюніті полягала в тому, щоб він протримався 90 сол (92,5 дня), за цей час проводячи численні дослідження Марса. Місія отримала кілька розширень і триває вже протягом Шаблон:Минуло днів днів з моменту посадки.
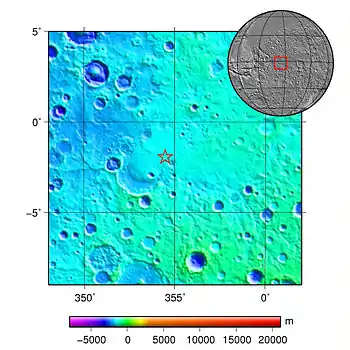
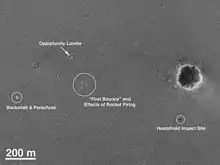
У процесі посадки марсохід випадково потрапив в кратер (Ігл) посеред плоскої рівнини. Оппортьюніті успішно вивчив ґрунт і зразки гірських порід, передав панорамні знімки кратера Ігл. Отримані дані дозволили вченим НАСА зробити припущення про наявність гематита, а також про присутність в минулому води на поверхні Марса. Після цього Оппортьюніті відправився на вивчення кратера Ендюранс, який вивчався ровером з червня по грудень 2004 року. Згодом Оппортьюніті виявив перший метеорит, нині відомий, як «Heat Shield Rock».
З кінця квітня по червень 2005 року Оппортьюніті не пересувався, оскільки застряг у дюні декількома колесами. Щоб витягти ровер з мінімальним ризиком, за 6 тижнів було виконано моделювання місцевості. Успішне маневрування по кілька сантиметрів за день зрештою звільнило ровер, тим самим дозволивши йому продовжити свою подорож по поверхні червоної планети.
Далі Оппортьюніті вирушив у південному напрямку до кратера Еребус, великого, неглибокого, частково засипаного піском кратера. Після цього ровер попрямував на південь, у бік кратера Вікторія. В період з жовтня 2005 року по березень 2006 року, апарат мав деякі механічні проблеми зі своїм маніпулятором.
В наприкінці вересня 2006 року Оппортьюніті досяг кратера Вікторія, досліджуючи його вздовж краю, рухаючись за годинниковою стрілкою. У червні 2007 року він повернувся в Качину затоку, тобто у вихідну точку прибуття. У вересні 2007 року ровер увійшов у кратер, щоб почати його детальне вивчення. У серпні 2008 року Оппортьюніті залишив кратер Вікторія, попрямувавши у бік кратера Індевор, досяг якого 9 серпня 2011 року.[17] Досягнувши своєї мети, марсохід вирушив до мису Кейп-Йорк, який лежить на західній кромці кратера. Тут орбітальний апарат Mars Reconnaissance Orbiter виявив наявність філлосилікатів, після чого Оппортьюніті почав вивчення порід своїми інструментами, щоб підтвердити ці спостереження з поверхні. Вивчення мису завершилося до настання літа. В травні 2013 року ровер відправили в південному напрямку, в бік пагорба «точка Соландер». В серпні 2013 року Оппортьюніті прибув до підніжжя пагорба, почавши «сходження» на нього.
Загальна кількість пройденого шляху на 26 серпня 2016 (4473 сол) становить 43,1 кілометра (26,78 миль)[18]. Сонячні батареї виробляють 464 Вт*час/сол, при прозорості атмосфери 0,498 і коефіцієнті пилу 0,691 одиниць.
Події
Технічні неполадки
Довге перебування на Марсі не минуло безслідно для Оппортьюніті, місія якого спочатку планувалася на 90 днів. За 10 років роботи з'являвся цілий ряд технічних несправностей:
- Проблеми з маніпулятором;
- У 2007 році у Оппортьюніті виникли несправності в роботі правого переднього колеса (стрибки напруги) — схожа на несправність, яка вивела з ладу праве переднє колесо Спіріта. Інженери дали перепочити колесу, коли ровер довгий час вивчав гірське оголення. В грудні 2013 року ці неполадки знову повторилися. Команда вживає активних заходів заради усуненню цієї несправності;
- Інфрачервоний теплової емісійний спектрометр MiniTES відімкнений з 2007 року, коли його дзеркало забила пилова буря, в зв'язку з чим він не може приймати зображення. Для подальшої експлуатації приладу необхідний сильний потік вітру, який очистить зовнішню поверхню дзеркала від пилу;
- Мініатюрний мессбауерівський спектрометр, який дозволяє визначати сполуки заліза в породах, нині відключений. Застосовуваний в ньому Кобальт-57 має період напіврозпаду 271,8 днів, тому за 9 років роботи він практично вичерпав свій ресурс. Під час зимівлі 2011 Оппортьюніті ще намагався якось його застосувати, в результаті довелося витратити кілька тижнів щоб отримати результати одного зразка;
- Через кілька років перебування на Марсі в Оппортьюніті виникли проблеми з його буром(RAT), за допомогою якого він робить невеликі поглиблення в породі. Тестування показало, що датчики наведення бура на породу працюють некоректно, але інженери, перепрограмувавши програмне забезпечення, вирішили дану проблему;
- Вийшов з ладу один обігрівач.
- 22 квітня 2013 Оппортьюніті самовільно перемикнувся в стан, який можна охарактеризувати як «режим очікування».[19] Оператори на Землі дізналися про це 27 квітня 2013 року. Первинне тестування дозволило встановити, що Оппортьюніті відчув щось недобре в своїх системах 22 квітня, під час вимірювання прозорості атмосфери Марса і перемикнувся в режим очікування. Інженери підозрюють, що марсохід вирішив перезавантажити свій бортовий комп'ютер у той час, коли його камери робили знімки Сонця. 1 травня 2013, по команді з Землі, Оппортьюніті успішно вийшов з «режиму очікування» і відновив свою наукову діяльність.
Наукові результати
Оппортьюніті надав переконливі докази на підтримку головної мети його наукової місії: пошук і дослідження каменів і ґрунтів, які можуть містити дані про минуле дії води на Марсі. На додаток до перевірки «водної гіпотези», Оппортьюніті зробив різні астрономічні спостереження, а також з його допомогою були уточнені параметри атмосфери Марса.
7 червня 2013 на спеціальній конференції, присвяченій десятій річниці запуску Оппортьюніті, керівник наукової програми марсоходу Оппортьюніті Стів Сквайрс заявив, що в давні часи на Марсі була вода, придатна для живих організмів. Відкриття було зроблено при вивченні каменю, названого «Есперанс-6» (Esperance 6). Результати чітко свідчать про те, що кілька мільярдів років тому цей камінь перебував у потоці води. Причому ця вода була прісною і придатною для існування в ній живих організмів. Всі попередні свідчення існування води на Марсі зводилися до того, що на планеті існувала рідина, що більш нагадує сірчану кислоту. Опортуніті ж знайшов саме прісну воду[20].
Нагороди
За неоціненний вклад Оппортьюніті у вивчення Марсу, на його честь був названий астероїд 39382. Назву запропонувала Інгрід ван Хаутен-Груневельд, яка разом з Корнелісою Йоханнес ван Хаутен і Томом Герельсом виявили цей астероїд 24 вересня 1960.
Посадкову платформу Оппортьюніті назвали «Меморіальна Станція Челленджера».[21]
Див. також
- Космічна біологія
- Автономний робот
- Клімат Марса
- ЕкзоМарс
- Місії на Марс
- Гологія Марса
- InSight
- Життя на Марсі
- Список штучних об'єктів на Марсі
- Mars Exploration Rover
- Марс-експрес
- Марс Одіссей
- Mars Pathfinder
- Mars Reconnaissance Orbiter
- Місія Mars 2020 rover
- Марсіанська наукова лабораторія
- Марсохід «Оппортьюніті»
- Дослідження космосу
- Програма «Вікінг»
- Хронологія подій Марсіанської наукової лабораторії
- Марсохід «Спіріт»
- Дослідження Марса
Примітки
- Грани. Ру: названия американским марсоходам дала девятилетняя сирота из Сибири
- NASA's Record-Setting Opportunity Rover Mission on Mars Comes to End. NASA. 13.02.2019. Процитовано 13.02.2019.(англ.)
- Місія марсоходу Opportunity офіційно завершена. Радіо Свобода. 13.02.2019. Процитовано 13.02.2019.
- Останні фото, які зробив марсохід Opportunity: неймовірні кадри. 24 Канал. 13 березня 2019. Архів оригіналу за 4 червня 2021. Процитовано 5 червня 2021.
- Научные цели марсохода (англійською). НАСА. Архів оригіналу за 24 серпня 2011. Процитовано 5 червня 2011.
- Rovers Launched on Delta IIs
- Technologies of Broad Benefit: Telecommunications.
- Technologies of Broad Benefit: Avionics
- Technologies of Broad Benefit: Software Engineering
- In-situ Exploration and Sample Return: Entry, Descent, and Landing.
- In-situ Exploration and Sample Return: Autonomous Planetary Mobility.
- Batteries and Heaters
- Mars Exploration Rover Mission: The Mission
- Chang, Kenneth (7 листопада 2004). Martian Robots, Taking Orders From a Manhattan Walk-Up. The New York Times. Процитовано 9 квітня 2009.
- Squyres, Steve (2005). Roving Mars: Spirit, Opportunity, and the Exploration of the Red Planet. Hyperion Press. с. 113–117. ISBN 978-1-4013-0149-1.
- MER - Batteries and Heaters. Jet Propulsion Laboratory. NASA. Архів оригіналу за 18 жовтня 2012. Процитовано 13 серпня 2012.
- NASA - NASA Mars Rover Arrives at New Site on Martian Surface. Nasa.gov. Архів оригіналу за 18 жовтня 2012. Процитовано 15 липня 2012.
- Crushing Rocks With Wheels(англ.)
- Opportunity in Standby as Commanding Moratorium Ends
- Питьевой Марс. 8 червня 2013. Архів оригіналу за 10 червня 2013. Процитовано 19 вересня 2014.
- Space Shuttle Challenger Crew Memorialized on Mars. Архів оригіналу за 18 жовтня 2012. Процитовано 24 липня 2008.
