Теорія лінійних стаціонарних систем
Тео́рія ліні́йних стаціона́рних систе́м — розділ теорії динамічних систем, що вивчає поведінку і динамічні властивості лінійних стаціонарних систем (ЛСС). Використовується для вивчення процесів керування технічними системами, для цифрової обробки сигналів і в інших галузях науки і техніки.
Огляд
Визначальними властивостями будь-якої лінійної стаціонарної системи є лінійність і стаціонарність:
- Лінійність означає лінійний зв'язок між входом і виходом системи.
Формально, лінійною називається система, що має таку властивість:
- якщо сигнал на вході системи можна подати зваженою сумою впливів (наприклад, двох) — ::
- то сигнал на виході системи є також зваженою сумою реакцій на кожен із впливів — ::
- для будь-яких сталих A і B.


- Стаціонарність — означає, що вихідний сигнал системи як реакція на будь-який заданий вхідний сигнал однаковий для будь-якого моменту прикладення вхідного сигналу (з точністю до часу запізнювання моменту прикладення вхідного сигналу). У вужчому сенсі — при запізненні вхідного сигналу за часом на деяку величину, вихідний сигнал буде запізнюватися на ту ж саму величину.
Динаміку системи, що має перераховані вище властивості, можна описати однією простою функцією, наприклад, імпульсною перехідною функцією. Вихід системи можна розрахувати як згортку вхідного сигналу з імпульсною перехідною функцією системи. Цей метод аналізу іноді називають аналізом у часовій області. Сказане справедливе і для дискретних систем.
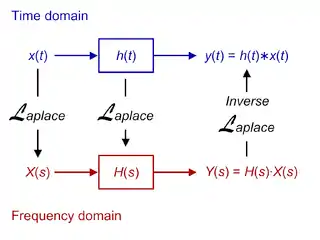
Крім того, будь-яку ЛСС можна описати в частотній області за допомогою її передавальної функції, яка є перетворенням Лапласа імпульсної перехідної функції (або Z-перетворенням у разі дискретних систем). У силу властивостей цих перетворень, вихід системи в частотній області дорівнюватиме добутку передавальної функції і відповідного перетворення вхідного сигналу. Іншими словами, згортці в часовій області відповідає множення в частотній області.
Для всіх ЛСС власні функції є комплексними експонентами. Тобто, якщо вхід системи є комплексним сигналом з деякою комплексною амплітудою і частотою , то вихід дорівнюватиме деякому сигналу з комплексною амплітудою . Відношення буде передавальною функцією системи на частоті .






Оскільки синусоїда є сумою комплексних експонент з комплексно-спряженими частотами, якщо вхід системи — синусоїда, то виходом системи буде також синусоїда, в загальному випадку з іншого амплітудою і фазою, але з тією ж частотою.
Теорія ЛСС добре підходить для опису багатьох систем. Більшість ЛСС значно простіше аналізувати, ніж нестаціонарні і нелінійні системи. Будь-яка система, динаміка якої описується лінійним диференціальним рівнянням зі сталими коефіцієнтами, є лінійною стаціонарною системою. Прикладами таких систем є електричні схеми, зібрані з резисторів, конденсаторів і котушок індуктивності (RLC-ланцюжки). Вантаж на пружині також можна вважати ЛСС.
Більшість загальних концепцій ЛСС схожі як у разі неперервних систем, так і в разі дискретних систем.
Стаціонарність і лінійні перетворення
Розглянемо нестаціонарну систему, чия імпульсна характеристика є функцією двох змінних. Подивимося, як властивість стаціонарності допоможе нам позбутися від одного виміру. Наприклад, нехай вхідний сигнал — , де аргумент — числа дійсної осі, тобто . Лінійний оператор показує, як система відпрацьовує цей вхідний сигнал. Відповідний оператор для деякого набору аргументів є функцією двох змінних:




Для дискретної системи:

Оскільки — лінійний оператор, вплив системи на вхідний сигнал подається лінійним перетворенням, описуваним таким інтегралом (інтеграл суперпозиції)

Якщо лінійний оператор до всього іншого є і стаціонарним, тоді

Поклавши

отримаємо:

Для стислості запису другий аргумент в зазвичай опускають і інтеграл суперпозиції стає інтегралом згортки:


Таким чином, інтеграл згортки показує як лінійна стаціонарна система відпрацьовує будь-який вхідний сигнал. Отримане співвідношення для дискретних систем:

Імпульсна перехідна функція
Якщо до входу системи прикласти вхідний сигнал у вигляді дельта-функції Дірака, кінцевий вихідний сигнал ЛСС являтиме собою імпульсну перехідну функцію системи. Запис:

Для дискретної системи:

(через властивості зсуву дельта-функції).
Зауважимо, що:

тобто — імпульсна перехідна функція системи.

Імпульсна перехідна функція використовується для того, щоб знайти вихідний сигнал системи як реакцію на будь-який вхідний сигнал. Крім того, будь-який вхід можна подати у вигляді суперпозиції дельта-функцій:

Приклавши до входу системи, отримаємо:
- (оскільки лінійна)
- (оскільки стала за t і лінійна)
- (за визначенням )





В імпульсній перехідній функції міститься вся інформація про динаміку ЛСС.
Власні функції
Власна функція — функція, для якої вихід оператора являє собою ту ж функцію, в загальному випадку з точністю до сталого множника. Запис:
- ,

де f — власна функція, і — власне число, стала.

Експоненти , де є власними функціями лінійного стаціонарного оператора.


Доведення
Нехай вхідний сигнал системи . Тоді вихідний сигнал системи дорівнює:


що еквівалентно такому виразу в силу комутативності згортки:
- ,



де

залежить тільки від s.
Таким чином, — власна функція ЛСС.
Перетворення Лапласа і Фур'є

є точним способом отримати власні числа з імпульсної перехідної функції. Особливий інтерес становлять чисті синусоїди, тобто експоненти вигляду де і — уявна одиниця. Їх зазвичай називають комплексними експонентами, навіть якщо аргумент не має дійсної частини. Перетворення Фур'є дає власні числа для чисто комплексних синусоїд. називається передавальною функцією системи, іноді в літературі цей термін застосовують і до .






Перетворення Лапласа зазвичай використовують для односторонніх сигналів, тобто за нульових початкових умов. Початковий момент часу без втрати загальності приймається за нуль, а перетворення береться від нуля до нескінченності (перетворення, яке виходить при інтегруванні також і до мінус нескінченності, називається двостороннім перетворенням Лапласа).
Перетворення Фур'є використовується для аналізу систем, через які проходять періодичні сигнали, і в багатьох інших випадках — наприклад, для аналізу системи на стійкість .
Через властивості згортки для обох перетворень мають виконуються співвідношення:


Для дискретних систем:


Деякі властивості
Деякі з важливих властивостей будь-якої системи — причинність і стійкість. Для того, щоб система існувала в реальному світі, має виконуватися принцип причинності. Нестійкі системи можуть бути побудованими і іноді навіть бути корисними.
Причинність
Система називається причинною, якщо її вихід залежить тільки від поточного або попереднього прикладеного впливу. Необхідна і достатня умова причинності:

Для дискретних систем:

де — імпульсна перехідна функція. У явному вигляді визначити причинна система чи ні з її перетворення Лапласа в загальному випадку неможливо, оскільки зворотне перетворення Лапласа не є унікальним. Причинність можна визначити, коли задано область збіжності.
Стійкість
Система є стійкою за обмеженим входом, обмеженим виходом (англ. bounded input, bounded output stable, BIBO stable) якщо для кожного обмеженого входу вихідний сигнал є скінченним. Запис: Якщо

і

(тобто, максимуми абсолютних значень і скінченні), то система стійка. Необхідна і достатня умова стійкості: імпульсна перехідна характеристика системи, , має задовольняти виразу


Для дискретних систем:

У частотній області область збіжності має містити уявну вісь .

Посилання
- P. P. Vaidyanathan and T. Chen. Role of anticausal inverses in multirate filter banks -- Part I: system theoretic fundamentals // IEEE Trans. Signal Proc. : journal. — 1995. — 5.
- P. P. Vaidyanathan and T. Chen. Role of anticausal inverses in multirate filter banks -- Part II: the FIR case, factorizations, and biorthogonal lapped transforms // IEEE Trans. Signal Proc. : journal. — 1995. — 5.
- В.И. Зубов. Теория уравнений управляемого движения. — Л. : ЛГУ, 1980.
