Наведення гармати
Наведення гармати процес прицілювання артилерійської одиниці, наприклад гармати, гаубиці або мортири, на землі або на морі, проти наземної або повітряної цілі. При цьому може вестися як прямий вогонь, при якому гармату наводять як і стрілецьку зброю, так і непрямий вогонь, при якому дані для стрільби вираховуються і застосовуються по відношенню до цілі. Термін включає в себе використання автоматичних систем наведення, наприклад, дані отримані за допомогою радару і гармати керовані комп'ютером.

При наведенні гармати ствол рухається у двох площинах, горизонтальній і вертикальній. Гармата наводиться по «траверсу» – обертається у горизонтальній площині – для наведення на ціль і по «підвищенню» – рухається у вертикальній площині – для встановлення правильної дальності до цілі.
Опис

Наведення гармати це набір дій для вирівнювання осей гарматного ствола щоб він вказував у потрібному напрямі. Це вирівнювання знаходиться в горизонтальній та вертикальній площинах. Наведення гармати може здійснюватися при прямій стрільбі, коли навідник бачить ціль або при непрямій стрільбі, коли ціль не видно. Наведення гармати інколи називають «підготовка гармати».
Наведення у вертикальній площині (кут підвищення) використовує дані, отримані під час випробувань або на основі досвіду. Для будь-якого типу зброї та снаряда, цей показник показує дистанцію до цілі та розмір заряду. Сюди також включено різницю у висоті між гарматою і ціллю. При непрямій стрільбі сюди також можуть включатися інші змінні.
При прямій стрільбі, наведення у горизонтальній площині це просто лінія візування до цілі, хоча наведення може враховувати вітер, а з нарізною зброєю приціли можуть компенсувати «дрейф» снаряда. При непрямій стрільбі горизонтальний кут є відносним до чогось, як правило прицільна точка гармати, хоча з сучасними електронними прицілами це може бути гіроскоп спрямований на північ.
В залежності від установки гармати зазвичай обирають дві траєкторії. Кут ділення між траєкторіями становить 45 градусів, він може дещо змінюватися у різних гармат. Нижче 45 градусів траєкторію називають «низьким кутом» (або нижнім регістром), вище — «високим кутом» (або верхній регістр). Різниця полягає у тому, що при нижньому куті стрільби час польоту снаряду менший, нижча вершина і більш пологий кут падіння.
Всі гармати мають лафети або установки, які підтримують механізм ствола (у деяких країнах вона має назву матеріальна частина). Перші гармати можна було наводити, рухаючи весь лафет або установку, і це тривало з важкою артилерією під час Другої світової війни. Установки можуть бути встановлені у рухомі башти на кораблях, у башти берегової оборони або танки. Приблизно з 1900 лафети польової артилерії можна було наводити без руху коліс.
Лафет, або установка, дозволяє виставляти необхідний кут підвищення ствола. На деяких гарматах є можливість встановлювати негативний кут підвищення, тобто рухати ствол у вертикальній площині нижче горизонту. Деякі гармати вимагають майже горизонтального підвищення для заряджання. Важливою здатністю будь-якого механізму підвищення є протидія вазі стволу, який тягне важчий кінець донизу. Цьому в значній мірі допомагає наявність цапф у центрі тяжіння, хоча можна використовувати механізм противаги. Це також означає, що підйомний механізм повинен бути достатньо міцним, щоб протистояти значному зниженню тиску, але, щоб мати можливість легко наводити гармату.
До появи противідкотних пристроїв, які були винайдені наприкінці 19-го століття і інтегрованих у лафети або установки, гармати рухалися назад після пострілу і тому їх потрібно було накатувати вперед перед заряджанням. Проте, у мортир, де сили відкоту уходили напряму у землю (або воду, при установці на кораблі), не завжди потребували подібного руху. З впровадженням противідкотних систем у польову артилерію, на лафеті з'явився супорт для обертання, спочатку таке «наведення» становило кілька градусів, скоро з'явилася можливість повного обертання, зазвичай для зенітних гармат. Поява противідкатних систем стала визначним етапом у розвитку артилерії.
Історія
Предісторія


Ранні гармати заряджалися з дула. Зазвичай вони являли собою прості металеві стволи, які перевозили у возах, а для стрільби їх встановлювали на землю, потім їх встановлювали на дерев'яні рами та ложа. Горизонтальне наведення на ціль було на око, а вертикальне наведення здійснювалося за допомогою підвищення ствола за допомогою клина або викопування ями під другим кінцем ствола[1].
Лафети з'явилися у 15-му столітті. Стандартним для польових гармат стали два великих колеса, вільна вісь та хобот лафета. Ствол у дерев'яній люльці з цапфами встановлювався на лафеті. З покращенням технологій, цапфи стали частиною ствола, а люльку було прибрано. Тим не менш вони були відносно великими і важкими[2].
Для горизонтального наведення рухали хобот лафета. Щоб досягти необхідного кута підвищення, використовувались різні механізми. Серед простих були клини, які забивали між казенником і хоботом лафета, але для підтримки затвора і створення більших кутів підвищення використовували дерев'яні квадранти або прості риштування, змонтовані на хоботі лафета. Також для підвищення використовували гвинтові пристрої з початку 16-го століття[3].
.jpg.webp)
Проте, морські та деякі фортечні лафети і установки розвивалися по-різному. Польова мобільність тут не була потрібна, тому великі колеса і хоботи для лафетів були непотрібні. Висота під палубами була низькою. Це призвело до появи компактних лафетів на чотирьох маленьких колесах. Звісно, наведення у горизонтальній площині під великими кутами було ускладнено, але таке було не потрібне при бортовій стрільбі. Проте, у фортеці потрібні були ширші кути наведення. Одним з рішень була поява платформ і ковзних установок. Широкий траверс був корисним на деяких корабельних гарматах.
Наведення вимагає прицілів. У спрощеному вигляді це було просте наведення гармати у правильному напрямі. Однак з'явилися різні допоміжні засоби. Горизонтальне наведення передбачає наведення шляхом спостереження вздовж стволу, такі прицільні пристрої складалися з виїмки, зробленої на кільці на казенній частині ствола і «жолудя» на кільці навколо дула. Деколи такі прицільні пристрої використовувалися у 19-му столітті[4].
Відстань з пласкою траєкторією має назву «порожня точка». Хоча, для деяких цілей достатньо порожньої точки, польова артилерія (мобільна або статична) та гармати у фортецях потребували більшу відстань. Це потребує створення шляхів вимірювання кутів підвищення і відоме як відношення між кутом підвищенням та відстанню.
Ранні механічні пристрої наведення

Першим задокументованим пристроєм для вимірювання підвищення став винахід квадранта для навідників Нікколо Тартальї приблизно у 1545. Цей пристрій мав два важеля під прямим кутом, з'єднаних дугою, позначеною кутовими градаціями. Один важіль було встановлено на дулі і висок, підвішений до дуги з вказівками кута підвищення. Це призвело до численних розрахунків, пов'язаних з кутом підвищення до відстані.
Проблема була в тому, що ці розрахунки робили, як тепер прийнято казати за траєкторією «у вакуумі» — вони не враховували тиск повітря на снаряд. Необхідно було провести випробування дальності і точності для визначення фактичної залежності відстані від кута підвищення.[5] Практичні випробування були проведені Вільямом Елдером, майстром-стрільцем замку Дувр, під час випробувань у 1613, 1617 та 1622. Він використав велику кількість гармат, в тому числі кулеврини, напів-кулеврини, фальконети та Сакер. За результатами випробувань, він створив таблицю відстаней для підвищення до 10 градусів для кожного типу гармат зі стандартним метальним зарядом.[6]
Проблема, яка впливала на наведення гармати, полягала у зовнішній формі ствола. Це впливало на підвищення гармати коли вона наводилася за допомогою прицілу на стволі. На початку 17-го століття для компенсації цього були створені «розділені приціли». Приціл представляв собою шматочок металу, який розташовували на дулі для створення лінії прицілювання на осі, яка була паралельною стволу. Іншою методикою було вимірювання глибини ствола через запальний отвір та дуло, для визначення різниці, яку треба компенсувати через вужчий до одного кінця ствол.
Балістичний маятник було винайдено у 1742 англійським математиком Бенджаміном Робінсом і опубліковано у його книзі Нові принципи стрільби, яка стала революцією у науці балістики, оскільки він вперше точно визначив швидкість кулі.[7][8]
Робінс використав балістичний маятник для вимірювання швидкості снаряда двома шляхами. Перший полягав у тому, що пістолет прикріпляли до маятника і вимірювали відбій. Оскільки імпульс пістолета дорівнював імпульсу відбою та оскільки снаряд (у експериментах) мав вагу більшу за відбій, швидкість кулі була приблизною. Другий, і точніший метод, полягав у прямому вимірюванні імпульсу кулі при стрільбі у маятник. Робінс експериментував з мушкетними круглими кулями вагою в одну унцію (30 г), у той час як його сучасники використовували гарматні ядра вагою від одного до трьох фунтів (від 0,5 до 1,4 кг).
Перша система, у якій витіснявся балістичний маятник з прямим замірюванням швидкості снаряду, була винайдена у 1808, під час наполеонівських війн та представляв собою вал з двома паперовими дисками який швидко обертався; кулею стріляли через диски паралельно до валу, а кутова різниця у точках удару вказувала час, який сплинув при проходженні відстані між двома дисками. Пряме електромеханічне годинникове вимірювання з'явилося у 1840, з пружинним годинниковим механізмом, який запускався і зупинявся електромагнітами, які спрацьовували при проходженні через дві сітки з дротів, вказуючи час проходження відстані.
Прямі приціли були представлені у 19-му столітті. Вони були представлені заднім прицілом з так званим «жолудем» або схожим переднім прицілом на дулі. Прямий приціл був встановлений на кронштейні поруч або на затворі, окуляр (отвір або паз) був на верху вертикальної планки, який рухався вниз і догори на кронштейні. Планка мала позначки у ярдах або градусах. Цей приціл для прямої стрільби допомагав наводити гармату на ціль, рухаючи хобот лафета у горизонтальній площині і піднімаючи або опускаючи ствол у вертикальній площині. Наприкінці 19-го століття прості відкриті прямі приціли були замінені на оптичні телескопічні приціли на установках з шкалою підвищення і гвинт вирівняний по осі стволу.[9]
Сучасне наведення

Нарізна та казнозарядна артилерія з'явилася у середині 19-го століття, зокрема гармати розробки Вільяма Армстронга, гармати якого почали встановлювати на кораблі Королівського флоту з 1850-х років.[10]
Важливим проривом у мистецтві наведення гармат стала поява першого механізму відкоту. Відбій стволу абсорбувався гідравлічними циліндрами, а потім ствол повертався на своє місце пружиною, яка зберігала деяку енергію відкоту.[11] Це означало, що гармата після пострілу залишалася на місці.
Перший прототип з використанням цієї конструкції було побудовано у 1872 російським інженером В. С. Барановським. Його 2,5-дюймова швидкострільна гармата мала також гвинтовий затвор, самозводний механізм і стріляла унітарними снарядами. Противідкотний пристрій знаходився у люльці гармати.
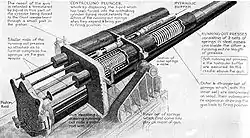
Незважаючи на всі спроби, розвиток та поширення ця система не отримала до появи французької 75 мм гармати у 1897, після чого ця система відкоту стала використовуватися усюди. Гарматний ствол ковзав назад на роликах, штовхаючи поршень у заповнений мастилом циліндр. Ця дія поглинала відбій поступово через зростання внутрішнього тиску повітря та, наприкінці відбою, створювала сильний, але зменшений зворотній тиск, який повертав ствол у вихідне положення. У цей час бездимний порох замінив димний порох у якості стандартного метального заряду.
.jpg.webp)
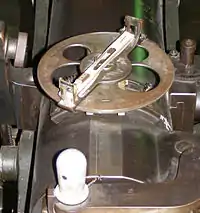
Перший справжній далекомір був розроблений шотландським товариством Barr & Stroud, піонерами оптичної інженерії. Арчибальд Барр та Вільям Страуд об'єдналися у 1888.[12] У 1891 до них звернулося Адміралтейство, щоб замовити розробку далекоміра з короткою базою та у 1892 вони отримали контракт на шість далекомірів. Пристрій, керувався однією особою, давав два зображення віддаленого об'єкта які співпадали, що дозволяло вирахувати відстань за її відносними рухами. [13]
.jpg.webp)
Тепер коли ствол залишався спрямованим на ціль після пострілу, більш примітивні прямі приціли були замінені на хитні рамкові приціли для прямого наведення на ціль. Такі приціли встановлювалися на швидкострільній гарматі QF 4.7-дюйми Mk I-IV з 1887. Хитні рамкові (або «рамка і циліндр») приціли мали шкалу підвищення, могли монтуватися з телескопічним і відкритим прицілом і забезпечували невелике горизонтальне відхилення. Вони забезпечували «незалежну лінію прицілювання» тому, що вона дозволяла встановлювати дані в установку та наводити оптичний (або відкритий) приціл на ціль незалежно від підвищення стволу.
Пов'язана з цим проблема, особливо для великих та далекобійних гармат, полягала у тому, що колеса могли бути встановлені на різних висотах через нерівну поверхню, що давало неточності у стрільбі. Перед Першою світовою війною, британська 60-фунтова гармата BL була оснащена хитним (зворотньо-поступальним) прицілом, який використовував оптичний приціл, візирний інклінометр та шкали відстані, а також циліндри відхилення для оптичних труб. Ці кріплення можуть бути перехресно вирівняні, що відміняє потребу для командира гармати вираховувати корекцію відхилення для нерівних коліс.[14] Перехресне вирівнювання вводило третю вісь у наведення.
Непряма артилерійська стрільба
Сучасна непряма стрільба відноситься на кінець 19-го століття. У 1882 російський підполковник К. Г. Гук видав працю Стрільба з закритих позицій польовою артилерією де описувався кращий метод непрямого наведення (замість точок прицілювання на лінії з ціллю). По суті, це була геометрія використання кутів до точок прицілювання, які могли бути у будь-якому напрямі відносно цілі. Проблема полягала у відсутності азимутального інструмента, який дозволить це зробити; для визначення підвищення вже існували інклінометри.
Німці вирішили цю проблему, винайшовши Richtfläche або «направлена площина» приблизно у 1890. Це був встановлений на гарматі відкритий приціл, який обертався, закріплений і вирівняний відносно ствола і був здатний вимірювати великі кути. Схожі конструкції, які зазвичай дозволяли вимірювати кути на всі 360 градусів, були прийняті на озброєння протягом наступного десятиліття. На початку 1900-х відкриті приціли інколи замінялися телескопічними, а термін гоніометр замінив термін «направлена площина» у англійському.
Перше безперечне, задокументоване використання непрямого вогню за методом Гука, хоча і без направлено-площинних прицілів, відноситься до 26 жовтня 1899, коли британські навідники застосували його під час другої англо-бурської війни.[15] Хоча обидві сторони продемонстрували на початку конфлікту, що могли ефективно використовувати цю техніку, у багатьох подальших баталіях, британські командири жадали, щоб артилерія була «менш сором'язливою», і рухалася вперед, щоб поставити під сумнів занепокоєння військ, що їх гармати їх покинули. Британці використовували імпровізовані гарматні дуги з гаубицями;[16] які прицільні пристрої використовували бури на своїх німецьких та французьких гарматах — не відомо.
Оптичні приціли з'явилися у перші роки 20-го століття, а німецький панорамний приціл Герца став зразком для решти 20-го століття. Вони мали градуювання у градусах з п'ятихвилинним інтервалом, дециградах та мілсах (4320, 4000 або 6000/6300/6400 до кола).
Особливістю наведення у 20-му столітті було використання одного або двох людей для наведення. У США використовували двох людей для наведення, у горизонтальній площині гармату наводила одна людина, а підвищенням займалася друга. У інших країнах загалом для наведення була одна людина. Інструктор по наведенню зазвичай навчав наступній послідовності дій: «грубо по лінії, грубо по підвищенню, перехрести, точно по лінії, точно по підвищенню».
Інша основна відмінність полягала у прицільних пристроях де було використання кута підвищення або, альтернативно, відстані. Ця проблема стала більш складною під час Першої світової війни, коли було з'ясовано зношення стволу через збільшення дулової швидкості. Це значило, що різні гармати потребують різні кути підвищення для стрільби на однакову відстань. Це призвело до того, що у багатьох арміях для обрахування кутів підвищення використовували батарейні командні пункти. Проте, у 1930-ті британці прийняли калібрування прицілів, у якому відстань встановлювалася на прицілі, який автоматично компенсував різницю між дуловою швидкістю відносно стандартної.
Альтернативою цього було «правило гармати» для кожної гармати; у цьому випадку відстань встановлювалася за правилом, а кут підвищення зчитувався і встановлювався на приціл для наведення. Проблема була вирішена з появою цифрових комп'ютерів на командному пості батареї, які вираховували правильні кути підвищення по відстані і дуловій швидкості точно і швидко.
Окрім калібрування прицілів, протягом 20-го століття у польовій артилерії не було визначних змін у наведенні гармат. Проте, у 1990-ті нові або модифіковані гармати отримали цифрові приціли, через їх успішне використання у ракетних системах, які були розроблені у 1970-ті роки. У них азимут і підвищення вводилися вручну або автоматично у комп'ютер наведення, коли кероване наведення використовувалося для горизонтального та вертикально керування до того як ствол потребував горизонтального та вертикального вирівнювання. Це обчислювало корекцію для перетину гармати і отримувало відповідь від електро-механічних пристроїв, таких як гіроскопи та електронні інклінометри, для вирівнювання стволу за осями. Ці прилади згодом були замінені кільцевими лазерним гіроскопами.
Наведення берегових і морських гармат

Більша частина берегової артилерії знаходилася у постійній обороні, у той або іншій формі «фортеця». Їхні цілі рухалися у двох вимірах, тому гармата повинна була наводитися на майбутню позицію цілі. Деякі гармати мали відносно малий калібр і могли атакувати близькі цілі, були більшими для далекобійних атак.
Берегова артилерія використовувалася для ведення прямого вогню і до кінця 19-го століття наведення мало змінилося, за винятком появи телескопічних прицілів.
Покращення у конструкції гармат та боєприпасів у дев'ятнадцятому столітті призвели до збільшення їхньої ефективної далекобійності. У 1879 майор Уоткінс з Королівського артилерійського гарнізону винайшов вертикально-базисний далекомір, позиційний далекомір та пов'язане керування вогнем.
Його опис пояснює його суть:
- «Шукач позиції слідкує за курсом корабля і коли гармати готові до наведення, вираховує позицію де буде корабель через пів хвилини або більше. Циферблати на гарматній палубі автоматично вказують відстань та підготовку до ураження цілі у прогнозованій позиції. Коли гармати наведені, вставляється електрична трубка (тобто детонатор), а сигнал передається на спостережну станцію про готовність до стрільби. Унтер-офіцер, що відповідає за пошук, спостерігає за появою корабля у поле зору своєї оптичної труби, а коли він потрапляє у перехрестя, натискає кнопку, і гармати стріляють.»[17]
Для досягнення повної ефективності знадобилося майже 20 років, але його загальний принцип став нормою для контролю і наведення важкого артилерійського вогню. Телескопічні приціли на гарматах, які стріляли на короткі дистанції, з прямим наведенням залишалися ще довгий період. У 20-му столітті у береговій артилерії, як і у польовій та у великих зенітних гарматах, при наведенні враховували поправки для нестандартних умов, таких як вітер та температура.
Системи керування вогнем
Для морської артилерії на борту великих кораблів скоро прийняли систему наведення, яка була схожа на розробки майора Уоткінса. З появою казнозарядних гармат, противідкатних механізмів та бездимного пороху, відбулася зміна схеми розташування гармат на бойових кораблях з бортового розташування на баштові гармата.
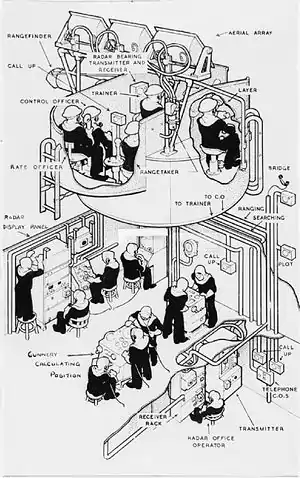
Проте, кораблі мали складнощі у порівнянні з наземними гарматами: вони вели вогонь з рухливих платформ. Це значило, що для визначення наведення потрібно було враховувати позицію як власного корабля, так і позицію цілі. Для точного наведення гармат створювалися все більше складні механічні обчислювальні машини, зазвичай дані від спостерігачів і вимірювачів відстані надходили до центральної станції у глибині корабля. Там команди керування вогнем визначали позицію, швидкість і напрям руху корабля і його цілі, крім того враховувалися різні коригування, такі як погодний вплив, коріолісів ефект та інші впливи.
Результати, відомі як вогневі рішення, передавалися назад на башти для наведення. Якщо снаряди не влучили, спостерігач визначав наскільки далеко вони не влучили і у якому напрямі, і ця інформація передавалася разом з іншою інформацією до комп'ютера для повторного залпу.
Зачаткові морські системи керування вогнем вперше з'вилися перед Першою світовою війною.[18] Перші такі системи створили, незалежно один від одного, Артур Поллен та Фредерік Чарльз Дрейєр. Поллен розпочав роботи над цією проблемою, після дуже неточних стрільб морської артилерії під час навчання навідників поблизу Мальти у 1900.[19] Лорд Кельвін, відомий британський вчений, вперше запропонував використовувати аналоговий комп'ютер для вирішення рівнянь, які з'являлися при русі кораблів у битві і затримці за часов через політ снаряда для визначення потрібної траєкторії, а також напряму і підвищення гармат.
Поллен спрямував зусилля на виробництво об'єднаних механічного комп'ютера та автоматичного графіка відстаней та швидкостей для централізованого керування вогнем. Для отримання інформації про позицію і відносний рух цілі, Поллен розробив графічний блок (або плоттер) для отримання даних. Він додав гіроскоп для визначення рискання корабля який стріляє. Знову ж таки, це вимагало істотного розвитку тогочасного примітивного гіроскопа для забезпечення безперервної надійної корекції.[20] Випробування відбувалися у 1905 та у 1906, які хоч і були не вдалими, але показали перспективи. Його зусилля підтримували адмірал Джекі Фішер, адмірал Артур Книвіт Уілсон та директор морського департамента артилерії і торпед Джон Джелліко. Поллен продовжив роботу, з періодичним проведенням тестів на кораблях Королівського флоту.
У той же час група на чолі з Дрейєром розробила таку ж систему. Крім того обидві системи було замовлено для нових і існуючих кораблів Королівського флоту, система Драйєра стала найбільш корисною у Королівському флотіthe у своєму остаточному форматі Mark IV*. Встановлення приладу керування вогнем створило закінчену систему керування вогнем для кораблів Першої світової війни, а тому до середини 1916 року майже всі кораблі Королівського флоту отримали такі системи. Прилад керування вогнем розташовувався високо над палубою, де спостерігач мав кращий огляд ніж будь-який навідник у башті. Він також міг координувати вогонь башт так щоб вони стріляли одночасно. Ці покращені приціли та великі оптичні далекоміри покращили визначення позиції противника під час стрільби. Система була замінена на покращений «Адміралтейський стіл керування вогнем» на кораблях, які спустили після 1927.
Починаючи з 1950-х років гарматні башти ставали автоматичними, з дистанційним керуванням наведенням гармат від центрального посту керування використовуючі дані, отримані з радару і інших джерел.
Телескопічні приціли для танків почали використовувати перед Другою світовою війною, ці приціли зазвичай мали пристрій наведення на ціль, яка рухається, і сітку з відмітками різних відстаней. Танкові приціли були двох основних типів. Приціл був зафіксований разом зі стволом з відмітками дальності у прицілі і для наведення гармати навідник наводив відмітку з відстанню на ціль. Або під час наведення навідник фізично вводив для зміщення осі ствола від осі прицілу, коригуючи значення та наводячи центральну мітку у прицілі на ціль.
Деякі приціли мали можливість вимірювати відстань, наприклад за допомогою стадіометричного методу. Інші танки використовували оптичні далекоміри з поєднанням роздвоєного зображення або після Другої світової війни, далекомірний кулемет. Починаючи з 1970-х років вони були замінені лазерними далекомірами. Проте, танкові гармати не могли вести точний вогонь у русі до появи стабілізаторів гармат. Вони з'явилися наприкінці Другої світової. Деякі були гідравлічні, а інші мали електричні приводи. Протягом 1970-х танки почали оснащуватися цифровими комп'ютерами.
Наведення зенітної артилерії

На початку 20-го століття з'явилась потреба у знищенні аеростатів та повітряних куль як з землі, так і з кораблів. Незабаром до цього списку приєдналися і літаки. Зенітний вогонь був прямий, наведення велося на літак. Проте, ціль рухалася у трьох вимірах, що ускладнювало наведення. Основна проблема наведення полягала у тому, що були потрібні механізми для обрахунку майбутньої позиції літака або наводити гармату на майбутню позицію літака. У будь-якому випадку проблемою було визначення висоти, швидкості та напряму руху цілі, а також «прицілювання» (інколи має назву «відхилення») для урахування часу польоту снаряду.
Німецькі повітряні атаки на британські острови розпочалися з початком Першої світової війни. Зенітна артилерія була важкою справою. Проблемою було успішне наведення на ціль так щоб снаряд вибухнув поряд з тим місцем де буде ціль, з урахуванням різних факторів які впливали на передбачену траєкторію польоту снаряда. Це називалося відхиленням наведення гармати. Кути 'зміщення' по дальності та підвищенню встановлювалися у приціл і оновлювалися відповідно до руху цілі. При цьому методі коли приціл був спрямований на ціль, ствол дивився на майбутню позицію цілі. Від відстані та висоти до цілі залежала довжина запалу. Складності збільшувалися з покращенням літаків.
Британці першими вирішили проблему у вимірюванні відстані, коли усвідомили, що відстань є ключем до вірних установок запалу. Це призвело до появи висотного далекоміру (HRF), першою моделлю став Barr & Stroud UB2, двометровий оптичний далекомір зі збігом зображень, який встановлювався на тринозі. Він вимірював відстань до цілі та кут підвищення, які разом давали висоту до цілі. Це були складні інструменти, крім того використовувалися і інші методи. До HRF невдовзі додали висотний/запальний індикатор (HFI), він мав маркування з кутами підвищення та рисками висоти накладеними на мітки довжини запалів. Використовуючі дані по висоті від оператора HRF, виставлялася потрібна довжина запалу.[21]

Однак, проблема установки відхилення вимагала даних даних про швидкість з якою ціль змінює позицію. У Франції та Великій Британії для відстеження цілі використовували тахіметричні пристрої і отримували вертикальні та горизонтальні кути відхилення. Французька система Брока була електричною, оператор вводив відстань до цілі, яка передавала дані на гармати; її використовували для 75 мм гармат. Британська система Уілсона-Долбі використовувала пару відстежуючих пристроїв та механічний тахіметр. Оператор вводив довжину запалу і кути відхилення, які отримував з інструментів.
У 1925 британці прийняли новий інструмент розробки компанії Vickers. Це був механічний аналоговий комп'ютер Predictor AA No 1. Отримавши висоти цілі оператор приладу слідкував за ціллю, а прилад керування зенітним вогнем видавав пеленг, квадрант підвищення та установки запалу. Дані передавалася електрично до гармат, де відображалися на циферблатах репітерів для навідників, які «узгоджували покажчики» (дані прицілювання та поточні дані гармати) для наведення гармат. Така система релейних електричних циферблатів була представлена для берегової артилерії у 1880-ті, а берегова артилерія стала підготовчою базою для багатьох офіцерів-зенітників. Схожі системи були і у інших країнах, наприклад більш пізній пристрій Сперрі, який мав позначення M3A3 і США, також використовувався у Британії під позначенням Predictor AA No 2. Висотоміри також збільшилися у розмірі, у Британії, висотомір часів Першої світової Barr & Stroud UB 2 (семифутова оптична база) був замінений на UB 7 (дів'ятифутова оптична база) та UB 10 (18-футова оптична база, використовували на стаціонарних зенітних позиціях). Герц у Німеччині та Левалю у Франції випускали 5 метрові висотоміри.
У Другій світовій війні ситуація в основному була наступною: для відстаней у кілька тисяч метрів, використовували дрібнокаліберні автоматичні гармати, з простими прицілами які дозволяли навіднику визначати відстань та швидкість цілі; для віддалених цілей, використовували прилади керування зенітним вогнем для стеження за ціллю, які контролювалися вручну, отримуючи дані від оптичних або радарних далекомірів, і вираховували дані для стрільби гармат, з корекцією на вітер та температуру.
Після Другої світової війни прилади керування зенітним вогнем змінювалися від електро-механічних аналогових комп'ютерів до цифрових комп'ютерів, але тепер важкі зенітні гармати були замінені на ракети, але електроніка дозволила зробити повністю автоматичне наведення малих гармат.
Див. також
Примітки
- Hogg pp. 97 — 98
- Hogg pp. 98 — 99
- Hogg illus. 6, 8, 9 and 11
- Hogg pp. 239—240
- Hogg pp. 238—239
- Hogg pp. 75, 273
- Chronograph. Encyclopædia Britannica, 11th Ed (1911). Архів оригіналу за 26 липня 2011.
- Edward John Routh (1905). The Elementary Part of A Treatise on the Dynamics of a System of Rigid Bodies. Macmillan.
- Hogg pp. 240—241
- Bellamy pg 13
- Bellamy pg. 23
- Archives of Barr and Stroud Архівовано 23 лютого 2015 у Wayback Machine.
- Robert Bud, Deborah Jean Warner (1998). Instruments of Science: An Historical Encyclopedia. Taylor & Francis. с. 182.
- Headlam Vol 2 pg. 96 — 97
- Frank W. Sweet (2000). The Evolution of Indirect Fire. Backintyme. с. 28–33. ISBN 0-939479-20-6.
- The History of the Royal Artillery from the Indian Mutiny to the Great War, Vol II, 1899—1914, Major General Sir John Headlam, 1934
- Headlam Vol 1 pg 302
- For a description of one, see US Naval Fire Control, 1918.
- Pollen 'Gunnery' p. 23
- Pollen 'Gunnery' p. 36
- ISBN 0-08-031200-4
Джерела
- Bellamy, Chris. 1986. Red God of War — Soviet artillery and rocket forces London: Brassey's, ISBN 0-08-031200-4
- Callwell, Major General Sir Charles and Headlam, Major General Sir John. 1931. The History of the Royal Artillery — From the Indian Mutiny to the Great War — Volume 1 (1860—1899). Woolwich: Royal Artillery Institution
- Headlam, Major General Sir John. 1934. The History of the Royal Artillery — From the Indian Mutiny to the Great War — Volume 2 (1899—1914). Woolwich: Royal Artillery Institution
- Hogg, Brigadier OFG. 1970. Artillery: Its origin, heyday and decline. London: C Hurst and Company
- The Official History of the Ministry of Munitions, Vol X The Supply of Munitions, Part VI Anti-Aircraft Supplies, 1922