Простір станів (теорія керування)
Простір станів — у теорії керування один з основних методів опису поведінки динамічної системи. Рух системи в просторі станів відбиває зміну її станів.
Визначення
Простір станів зазвичай називають фазовим простором динамічної системи, а траєкторію руху, що зображає точки в цьому просторі — фазовою траєкторією.[B: 1][B: 2][A: 1]
У просторі станів створюється модель динамічної системи, що включає набір змінних входу, виходу і стану, пов'язаних між собою диференціальними рівняннями першого порядку, які записуються в матричній формі. На відміну від опису у вигляді передавальної функції та інших методів частотної області, простір станів дозволяє працювати не тільки з лінійними системами і нульовими початковими умовами. Крім того, в просторі станів відносно просто працювати з MIMO-системами.
Лінійні неперервні системи
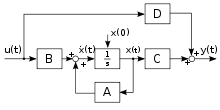
Для випадку лінійної системи з входами, виходами і змінними стану опис має вигляд:





де
- ; ; ;
- , , , , :
- — вектор стану, елементи якого називають станами системи
- — вектор виходу,
- — вектор керування,
- — матриця системи,
- — матриця керування,
- — матриця виходу,
- — матриця прямого зв'язку.















Часто матриця є нульовою, це означає, що в системі немає явного прямого зв'язку .
Дискретні системи
Для дискретних систем запис рівнянь у просторі ґрунтується не на диференціальних, а на різницевих рівняннях:


Нелінійні системи
Нелінійну динамічну систему n-го порядку можна описати у вигляді системи з n рівнянь 1-го порядку:



або в компактнішій формі:
- .


Перше рівняння — це рівняння стану, друге — рівняння виходу.
Лінеаризація
У деяких випадках можлива лінеаризація опису динамічної системи для околу робочої точки . У сталому режимі для робочої точки справедливий такий вираз:




Вводячи позначення:


Розклад рівняння стану в ряд Тейлора, обмежений першими двома членами дає такий вираз:


При взятті часткових похідних вектор-функції за вектором змінних станів і вектором вхідних впливів виходять матриці Якобі відповідних систем функцій:



- .

Аналогічно для функції виходу:

З огляду на , лінеаризований опис динамічної системи в околі робочої точки набуде вигляду: де

- .

Приклади
Модель у просторі станів для маятника
Маятник є класичною вільною нелінійною системою. Математично рух маятника описує таке співвідношення:

де
- — кут відхилення маятника.
- — зведена маса маятника
- — прискорення вільного падіння
- — коефіцієнт тертя в підшипнику підвісу
- — довжина підвісу маятника





У такому випадку рівняння в просторі станів матимуть вигляд:


де
- — кут відхилення маятника
- — кутова швидкість маятника
- — кутове прискорення маятника



Запис рівнянь стану в загальному вигляді:
- .

Лінеаризація моделі маятника
Лінеаризована матриця системи для моделі маятника в околі точки рівноваги має вигляд:


За відсутності тертя в підвісі k = 0 отримаємо рівняння руху математичного маятника:

Див. також
- Теорія керування
- Фазовий простір
- Критерій стійкості в просторі станів
- Простір понять
- Система відліку
- Модальне керування
Література
- книги
- Андронов А. А., Леонтович Е. А., Гордон И. М., Майер А. Г.. Теория бифуркаций динамических систем на плоскости. — М. : Наука, 1967.
- Андронов А. А., Витт А. А., Хайкин С. Э. Теория колебаний. — 2-е изд., перераб. и испр.. — М. : Наука, 1981. — 918 с.
- статті
- Фейгин М.И.. Проявление эффектов бифуркационной памяти в поведении динамической системы // Соросовский образовательный журнал : журнал. — 2001. — Т. 7, № 3. — С. 121—127.