Нелінійна система
Нелінійна система - динамічна система, в якій протікають процеси, описувані нелінійними диференціальними рівняннями.
Нелінійна динаміка – розділ сучасної математики, яка займається дослідженням нелінійних динамічних систем.
Під динамічною системою розуміють систему будь-якої природи (фізичну, хімічну, біологічну, соціальну, економічну і т.д.), стан якої змінюється (дискретно або неперервно) в часі. Нелінійна динаміка використовує при вивченні систем нелінійні моделі - частіше всього диференціальні рівняння і дискретні відображення.
Прийнято нелінійною називати теорію, в якій використовують нелінійні математичні моделі.
Однією із нелінійних є система яка має параметри, що періодично змінюються. В таких системах за певних умов може відбуватися виникнення параметричних коливань. Людина, що знаходиться на гойдалці, присідаючи у верхніх крайніх положеннях і піднімаючись в нижніх, збуджує параметричні коливання. При цьому за параметр виступає момент інерції гойдалки разом з людиною (як маятника із зміною положення маси). Поперечні параметричні коливання стержня можна викликати періодичними силами стискання, прикладеними до його кінців. Параметричні резонанси небезпечні в машинах і спорудах, тому що зростаюча параметрична вібрація можлива навіть при наявності демпфування, причому параметричний резонанс здійснюється не при дискретних значеннях частот (як наприклад резонансних частот при вимушених коливаннях), а в деяких діапазонах частот.
Визначення
В математиці, a лінійним відображенням (або лінійною функцією) є сутність яка задовольняє наступним двом властивостям:

- Адитивності або принципу суперпозиції:
- Однорідності:


Адитивність передбачає однорідність для будь-якого раціонального числа α, і, для неперервних функцій, для будь-якого дійсного α. Для комплексного α, властивість однорідності не випливає із адитивності. Наприклад, антилінійне відображення є адитивним але не однорідним. Умови адитивності і однорідності часто поєднуються у принцип суперпозиції

Рівняння вигляду

називають лінійним якщо є лінійним відображенням (що відповідає вищенаведеному визначенню) і нелінійним у іншому випадку. Рівняння називають однорідним якщо .

Визначення є дуже загальним в тому що може бути будь-яким змістовним математичним об'єктом (числом, вектором, функцією, і так далі.), а функція може бути будь-яким відображенням, включаючи інтегрування або диференціювання із пов'язаними з ними обмеженнями (наприклад, крайовими значеннями). Якщо містить диференціювання відносно змінної , результатом буде диференціальне рівняння.

Види нелінійної динамічної поведінки
- Хаос – значення системи не можна передбачити на майбутнє, а флуктуації є аперіодичними.
- Мультистабільність – існування двох або більше стійких станів.
- Згасання амплітуди – будь-які коливання присутні в системі втихають через взаємодію з іншою системою або зворотній зв'язок тієї ж системи.
- Солітони – одиночна хвиля, що само-підсилюється.
Нелінійні алгебраїчні рівняння
Нелінійні алгебраїчні рівняння, які також називають рівняннями із многочленами, визначаються як рівняння із поліномами (многочленами), які прирівняні до нуля. Наприклад,

Для простого алгебраїчного рівняння, існують алгоритми знаходження коренів рівняння, які дозволяють знайти рішення цих рівнянь (тобто, множину значень, які можна підставити у рівняння замість змінних, що будуть задовольняти даному рівнянню). Однак, системи алгебраїчних рівнянь є складнішими; їх вивченням займається область алгебраїчної геометрії, що є досить складною гілкою сучасної математики. Іноді навіть досить важко визначити чи має алгебраїчна система комплексні корені (див. Теорема Гільберта про нулі). Однак, випадок, коли системи мають скінченну кількість комплексних рішень, такі системи алгебраїчних рівнянь є добре вивченими і існують ефективні методи для їх розв'язання.[1]
Нелінійні диференційні рівняння
Про систему диференціальних рівнянь говорять, що вона не лінійна, якщо вона не є лінійною системою. Задачі, що потребують розвитку нелінійних диференціальних рівнянь є екстремально різноманітними, і від цього залежить методи розв'язку або аналізу. Прикладами нелінійних диференціальних рівнянь є рівняння Нав'є — Стокса із гідродинаміки і рівняння Лотки-Вольтерри з біології.
Однією із складностей нелінійних задач є те, що в загальному випадку не можливо об'єднати відомі розв'язки для побудови нових розв'язків. В лінійних задача, наприклад, сімейство лінійно незалежних розв'язків можна використати для побудови загальних розв'язків за допомогою принципу суперпозиції. Хорошим прикладом цього є одновимірна задача термодинаміки із накладеними граничними умовами Діріхле, розв'язок якої можна побудувати як залежну від часу лінійну комбінацію синусоїд різних частот; це робить рішення дуже гнучкими. Також можливо знайти декілька дуже специфічних рішень для нелінійних рівнянь, однак відсутність принципу суперпозиції не дозволяє побудувати нові рішення.
Звичайні диференціальні рівняння
Звичайні диференціальні рівняння першого порядку як правило вирішують за допомогою методу відокремлення змінних, особливо у випадку автономних рівнянь. Наприклад, нелінійне рівняння

має загальний розв'язок (а також u = 0 як частковий розв'язок, що відповідає границі загального розв'язку при якому C прямує до нескінченності). Рівняння є нелінійним оскільки воно записується у вигляді


ліва частина рівняння не є лінійною функцією від u і її похідних. Якби терм u2 було замінено на u, задача була б лінійною (задача експоненційного розпаду).
Звичайні диференційні рівняння другого і вищих порядків (у більш загальному випадку, системи нелінійних рівнянь) досить рідко мають розв'язки закритого виду, хоча зустрічаються можливі точні розв'язки і вирішення за допомогою не елементарних інтегралів.
До загальних методів якісного аналізу для розв'язку звичайних нелінійних диференційних рівнянь відносять:
- Дослідження будь-яких консервативних величин, особливо у Гамільтонових системах
- Дослідження дисипативних величин (див. функцію Ляпунова) аналогічно консервативним величинам
- Лінеаризація за допомогою розкладання в ряд Тейлора
- Замінна змінних з метою отримати форму, яку легше вивчати
- Теорія біфуркацій
- Методи теорії збурень (можуть застосовуватися і до алгебраїчних рівнянь)
Маятник
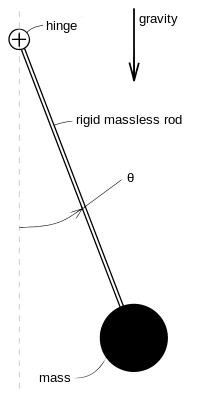
Класичною, широко вивченою нелінійною задачею є динаміка маятника під впливом гравітації. Використовуючи механіку Лагранжа, можна показати[2], що рух маятника можна описати за допомогою безрозмірнісного нелінійного рівняння

де сила гравітації направлена "вниз" і це кут, який утворює маятник із своїм початковим станом спокою, як показано на малюнку праворуч. Одним із підходів "вирішення" цього рівняння є використати як множник інтегрування, що дасть наступний результат:



що є безумовним розв'язком, який застосовує еліптичний інтеграл. Цей "розв'язок" як правило має не багато застосувань, оскільки в більшій мірі частка цього рішення прихована в не елементарному інтегралі (nonelementary unless ).

Іншим підходом до розв'язку цієї задачі є зробити нелінійність лінійною (в даному випадку функцію синусу) за допомогою ряду Тейлора в різних точках, що представляють інтерес. Наприклад, лінеаризація в точці , що називається малокутовим наближенням, має вигляд:


оскільки для . Це просте гармонічне коливання, що відповідають коливанням маятника в околі нижньої точки його шляху. Іншою точкою лінеаризації буде , що відповідає положенню маятника вертикально вгору:




оскільки для . Вирішення задачі передбачає використання гіперболічних синусоїд, і варто відмітити, що на відміну від малокутового наближення, це наближення є стійким, що означає що буде як правило зростати без границі, хоча можуть існувати і обмежені розв'язки. Це відповідає складності балансування маятника в вертикальній позиції, що фактично є нестабільним станом.



Ще одна цікава лінеаризація можлива довкола точки , довкола якої :



Це відповідає задачі вільного падіння. Дуже наглядне зображення динаміки маятника можна навести, якщо зібравши разом ці приклади лінеаризації, як показано на малюнку праворуч. Існують інші техніки, які дозволяють знайти (точні) фазові портрети і наближені періоди коливання.
Примітки
- Lazard, D. (2009). Thirty years of Polynomial System Solving, and now?. Journal of Symbolic Computation 44 (3): 222–231. doi:10.1016/j.jsc.2008.03.004.
- David Tong: Lectures on Classical Dynamics
Література
- Основи нелінійної динаміки: навч. посіб. / Д. Я. Хусаінов, А. В. Шатирко. — К. : Київський ун-т, 2017. — 159 с.
- Сучасні методи дослідження нелінійних динамічних систем: Посіб. для студ. / О. О. Сердюк. — Краматорськ: ДДМА, 2018. — 120 c.
- Практичне застосування нелінійних динамічних систем в інфокомунікаціях: матеріали VI Міжнародна науково-практична конференція (І Міжнародний симпозіум), м. Чернівці, 9-11 листопада 2017 р. — Чернівці: Місто, 2017. — ISBN 978-617-652-091-7
- Мачехин Ю. П., Курской Ю. С. Монография «Основы нелинейной метрологии». Издательство: LAP LAMBERT Academic Publishing. ISBN 978–3–65957–401–6, 2014.
- Мачехин Ю. П., Курской Ю. С. Модель измерения параметров нелинейных динамических систем // Системи обробки інформації. — 2012. — № 1 (99). — С. 169—175.
- Мачехин Ю. П., Курской Ю. С. Анализ результатов измерений в нелинейных динамических системах // Системи обробки інформації. — 2012. — № 7 (105). — С. 117—122.