Диференціальна геометрія кривих
Диференціа́льна геоме́трія криви́х — це розділ геометрії, який має справу з гладкими кривими на площині та у Евклідовому просторі і використовує для цього методи інтегрального та диференціального числення.
- Стаття розглядає криві лише у Евклідовому просторі. Більш загальну інформацію про криві можна знайти у аналогічних стаття про ріманові та псевдоріманові многовиди. Питання, що стосуються кривих у довільному топологічному просторі дивіться у головній статті присвяченій кривим.
Ще з античних часів, різні криві досліджувались за допомогою синтетичних методів. Диференціальна геометрія діє в інший спосіб: криві представлені у параметризованому вигляді і їх геометричні властивості та характеристики, пов'язані з ними, такі як кривина та довжина кривої, виражаються через похідні та інтеграли за допомогою векторного числення. Один з найважливіших засобів аналізу кривої — це репер Френе — рухомий репер, який забезпечує «найкращу» систему координат в кожній точці кривої.
Теорія кривих набагато менша та простіша ніж диференціальна геометрія поверхонь та її багатовимірні узагальнення, тому, що регулярна крива в Евклідовому просторі не має внутрішньої геометрії. Будь-яка гладка крива може бути параметризована довжиною дуги (натуральна параметризація[⇨]) і з точки зору комахи, яка повзе по кривій і нічого не знає про навколишній простір, їй всі криві здаватимуться однаковими. Різні криві у просторі відрізняються тим, як вони вигинаються. Кількісно це вимірюється диференціально-геометричними інваріантами, які називаються кривиною[⇨] та скрутом. Основна теорема теорії кривих стверджує, що знання цих інваріантів повністю визначає криву.
Визначення
Нехай n натуральне число, r — натуральне число або ∞, I позначає непорожній проміжок на числовій прямій і t належить I. Векторно-значна функція

класу Cr (тобто γ буде r разів неперервно діференційована) називається параметричною кривою класу Cr або Cr-параметризацією кривої γ. t називається параметром кривої γ. γ(I) називається образом кривої. Важливо відрізняти криву γ та образ кривої γ(I), тому, що образ кривої може бути описаний декільками різними кривими різного класу Cr.
Можна вважати, що параметр t представляє час, а крива γ(t) — це траєкторія об'єкту, що рухається у просторі.
Якщо I — це замкнений проміжок [a, b], точку γ(a) називають початковою точкою, а γ(b) — кінцевою точкою кривої γ.
Якщо γ(a) = γ(b), кажуть, що крива замкнена або петля. Крім того, кажуть, що γ замкнена Cr-крива, якщо γ(k)(a) = γ(k)(b) для усіх k ≤ r.
Якщо γ:(a,b) → Rn — ін'єктивне відображення, то кажуть, що крива проста.
Якщо параметрично задана крива γ може бути локально описана у вигляді степеневого ряду, то кажуть, що крива аналітична або класу .

Пишуть -γ для позначення того, що крива проходиться в зворотньому напрямку.
Ck-крива буде гладкою порядку m, якщо для кожного t з проміжку I


— лінійно незалежні вектори в Rn.
Зокрема, C1-крива γ гладка якщо для кожного .


Перепараметризація і відношення еквівалентності
Образ кривої може відповідати декільком різним параметризаціям кривої. Мета диференціальної геометрії описати інваріанти кривих незалежні від різних параметризацій. Отже, потрібно визначити відношення еквівалентності на множині всіх параметризованих кривих. Властивості диференціальної геометрії кривої (довжина, репер Френе та узагальнена кривина) є інваріантами відносно перепараметризації і тому є властивостями класів еквівалентності. Класи еквівалентності називаються Cr-кривими і є центральними об'єктами дослідження в диференціальній геометрії кривих.
Дві параметричні криві класу Cr

і

кажуть, що еквівалентні якщо існує бієктивне Cr-гладке відображення

таке, що

та

γ2 називають перепараметризацією γ1. Ця перепараметризація γ1 визначає відношення еквівалентності на множині всіх Cr-кривих. Клас еквівалентності називається Cr-кривою.
Можна визначити навіть тонше відношення еквівалентності на орієнтованих Cr-кривих, якщо вимагати, щоб φ було φ‘(t) > 0.
Еквівалентні Cr-криві мають однакові образи кривих. А еквівалентні орієнтовані Cr-криві навіть проходяться в однаковому напрямку.
Довжина і натуральна параметризація
Довжина l кривої γ : [a, b] → Rn класу C1 може бути визначена наступним чином:

Довжина кривої інваріантна відносно перепараметризації кривої і тому є властивістю кривої, яка розглядається в диференціальній геометрії.
Для кожної гладкої Cr-кривої (r не менше 1) γ: [a, b] → Rn можна визначити функцію

Записуючи

де t(s) — обернена функція до s(t), отримаємо перепараметризацію кривої γ яка називається природною або натуральною. Кажуть, що крива параметризована довжиною дуги або на ній задана параметризація одиничної швидкості. Параметр s(t) називається натуральним параметром γ.

Ця параметризація зручна тим, що натуральний параметр s(t) пробігає образ γ з одиничною швидкістю, тобто

Зазвичай на практиці складно отримати натуральну параметризацію кривої, проте, при теоретичних міркуваннях, дуже зручно розглядати криві задані натуральною параметризацією.
Для заданої кривої γ(t) єдина з точністю до вибору напрямку обходу кривої.
Величину

часто називають енергією або дією кривої; така назва виправдана тим, що рівняння геодезичної лінії є рівнянням Ейлера-Лагранжа руху для такої дії.
Дотик кривих
Дві криві , мають в спільній точці дотик порядку n, якщо у них збігаються похідні тільки до n-го порядку:




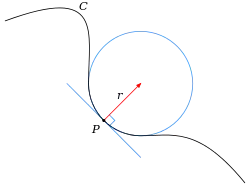
Наприклад, дотичною прямою буде пряма, яка є дотичною кривою не нижче 1-го порядку. Серед кіл дотичних до кривої виділяють стичне коло, яке є дотичною кривою не нижче 2-го порядку.
Кривина кривої
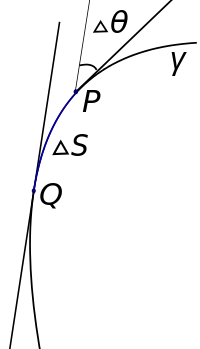
Кривина кривої визначає кількісну міру відхилення кривої від дотичної прямої. Далі наведено геометричне визначення кривини C2-гладкої кривої.
Нехай точка P належить регулярній кривій γ, точка Q на кривій, близька до точки P. Позначимо через кут між дотичними в точках P та Q, а через довжину дуги кривої між точками P та Q. Тоді кривиною кривої γ в точці P називається межа[1]



Очевидно, що якби крива γ була прямою, то дотичні до неї збігалися б із самою прямою і, тому кут буде нульовим, а отже і кривина прямої дорівнює нулю. Використовуючи наведене визначення нескладно обчислити кривину кола радіуса R, вона дорівнює . Тому величину обернену до кривини називають радіусом кривини.

Іноді кривині приписують знак. Якщо кривина може бути від'ємною, то її позначають як , коли ж береться модуль кривини, то позначають як


Обчислення кривини пласкої кривої
Нехай крива задана радіус-вектором

Для обчислення кривини пласкої кривої використовують формули (похідна береться по параметру t):

Без використання координат ( — векторний добуток):


Обчислення кривини кривої у просторі
Нехай крива задана радіус-вектором Кривину кривої можна знайти за формулою:


Без використання координат:

Еквівалентні формули:

Тут t позначає транспоновану матрицю. Останню формулу можна використовувати для обчислення кривини кривої в Евклідовому просторі довільної вимірності.
Примітки
- Борисенко, с. 27.
Література
- Борисенко, О. А. Диференціальна геометрія і топологія: Навч. посібник для студ. — Харків : Основа, 1995. — 304 с. — ISBN 5-7768-0388-8.
- Погорєлов О. В. Диференціальна геометрія. — М. : Наука, 1974. — 184 с. — ISBN 5-93972-068-4.