Системотехніка
Системоте́хніка, системна інженерія (англ. Systems Engineering) — напрямок науки і техніки, який охоплює проектування, створення, випробування та експлуатацію складних систем технічного і соціально-технічного характеру. Є прикладним втіленням теорії систем. Сформувалася до початку 1960-х років [1]

Загальний опис
У вузькому значенні, системотехніка — це інженерна дисципліна, яка займається :
- Проектуванням і впровадженням апаратних засобів обчислювальної техніки і інтелектуальних комп'ютерних систем.
- Налагодженням, налаштуванням, дослідною експлуатацією і поетапним введенням в дію апаратних засобів обчислювальної техніки і інтелектуальних комп'ютерних систем.
- Проектуванням і впровадженням системного і мережевого програмного забезпечення.
- Налаштуванням системного і мережевого програмного забезпечення.
- Встановленням прикладного програмного забезпечення.
- Технічним обслуговуванням інформаційних систем.
- Організацією інформаційних систем та захистом інформації в них.
Поняття системи та її представлення
У теорії систем та системотехніці уведений ряд термінів, серед яких до базових можна віднести наступні поняття.
- Система - множина елементів, які знаходяться у відношеннях та зв'язках між собою. Геометричним представленням системи є топологічний простір[2].
- Елемент - частина системи, яку недоцільно ділити на складові частини.
- Складна система - система, яка характеризується великим числом елементів та великим числом взаємозв'язків між елементами. Складність системи визначається також видом взаємозв'язків елементів, властивостями цілеспрямованості, цілісності (сутність зв'язаного простору), подільності, ієрархічності, багатоаспектності.
- Підсистема - частина системи (підмножина елементів та їх взаємозв'язки), яка має властивості системи.
- Надсистема - система, по відношенню до якої розглядувана система є підсистемою.
- Архітектура системи - принципова організація системи, втілена у її елементах, їх взаємовідношеннях один із одним та із середовищем, а також принципи, спрямовуючі ї проектування та еволюцію.
- Параметр - величина, яка виражає властивість або системи, або її частини, або середовища, яке впливає на систему. Параметри ділять на зовнішні, внутрішні й вихідні.
- Фазова змінна - величина, яка характеризує енергетичне наповнення елемента або підсистеми.
- Стан - сукупність значень фазових змінних, зафіксованих у певний час процесу функціонування.
- Поведінка (динаміка) системи - зміна стану системи у процесі функціонування.
- Система без післядії - її поведінка при визначається заданням стану у момент й вектором зовнішніх впливів У системах із післядією потрібно знати передісторію поведінки, тобто стани системи у моменти, які передують . З точки зору управління післядія може характеризуватися інерційністю системи. Припустимо, система керується множиною керм, положення яких характеризуються керуючими параметрами які є безінерційними, тобто коли можна миттєво перемиками ці "керма" з одного положення у інше (змінювати стрибком знічення керуючих параметрів з області управління )[3].
- Фазова траєкторія - представлення процесу (залежності вектора змінних стану ) у вигляді послідовності точок у просторі[4].






Таким чином, система у широкому сенсі - еквівалент поняття математичної моделі і задається парою множин ( - множина входів, - множина виходів) й відношенням на , яке формалізує зв'язок (залежність) між входами та виходами. Відношенням між та , , називається підмножина множини тобто декотра сукупність пар де







Наприклад, функціональний зв'язок може бути представлений як відношення між множинами яке включає пари , для яких




Сполучення систем також є системою й задається відношенням. Наприклад, послідовне сполучення систем є відношенням таким, що якщо існують які задовільняють умовам де - відношення, яке визначає зв'язок між та (у найпростішому випадку a - відношення тотожності якщо ).












Функціонування системи - це процес, який розгортається у часі, тобто множини можливих входів та виходів - це множини функцій часу із значеннями відповідно у множинах

де - множина моментів часу, на якому розглядається система.

Система є визначеною, якщо вхідній функції відповідає єдина вихідна функція У протилежному випадку система називається невизначеною.


Структура
Система непустих підмножини заданої множини називається розшаруванням множини , якщо кожний елемент належить лише одній підмножині з системи . Підмножини з називаються суміжними класами або шарами розбиття . З кожним розбиттям пов'язується бінарне відношення на лише тоді, коли та належать одному і тому ж шару множини Сукупність усіх суміжних класів множин по еквівалентності позначається й називається фактор-множиною від по .






Система - це не предмет, а масив змінних. Змінна - абстрактний образ властивості. Бінарне відношення пов'язує об'єкти із їхніми ознаками й породжує відповідність Галуа між підмножинами множини об'єктів й підмножинами множини ознак. Формальне поняття визначається як пара множин замкнених відносно відповідності Галуа. Відношення породжує на множині об'єктів рефлексивне симетричне відношення толерантності, за якого об'єкти співпадають, якщо мають спільні ознаки[6].





При одиничному спостереженні властивість має один конкретний прояв. Для спостереження можливих змін проявів потрібна множина спостережень цієї властивості, тому потрібно відрізняти окремі спостереження властивості, здійснювані за однакової процедури. Будь-яку суттєву властивість, яка використовується для визначенні відмінностей у спостереженнях однієї і тієї ж властивості, можна назвати базою (backdrop). Наприклад, типовою базою є час - у цьому випадку різні спостереження однієї і тієї ж властивості відрізняються одне від одного тим, що вони зроблені у різні моменти часу. Окрім часу, в якості бази можна виділити простір тощо. Відповідно кожна змінна має певне ім'я (мітку), яка відрізняє її від інших розглядуваних змінних, і пов'язується із певною множиною величин, через які вона себе проявляє. Ці величини називають станами (або значеннями) змінної, а усю множину - множиною станів. Аналогічно параметром є операційне представлення бази. Кожний параметр має унікальне ім'я, і з ним пов'язується деяка множина; цю множину можна назвати параметричною множиною, а її елементи - значеннями параметра. Якщо використовується два й більше параметри, то їх спільною параметричною множиною є прямий добуток окремих параметричних множин.
Описати кількісно яку-небудь ситуацію чи подію - значить дати для декотрого числа параметрів обраних в якості характеристичних, вказати числові значення, які встановлюються за спостережень. Дві ситуації, або дві події є порівнюваними, якщо характеристичні параметри для них будуть однаковими. Два описи, які використовують однакові параметри, називаються рівноцінними. У випадку, коли є число рівноцінних описів порівнюваних ситуацій або подій можна кожне з них зобразити точкою у -вимірному просторі із параметрами в якості координат. Розподіл цих точок репрезентує експериментальний матеріал. Якщо відома достатня кількість точок, то такий розподіл можна розглядати як функцію, яка дає щільність розподілу. Якщо множина точок концентрується у просторі меншого числа вимірів то між параметрами існують закономірних співвідношень, відшукання яких складає одну з основних задач фізики. У протилежному випадку відомі лише статистичі співвідношення, які представляються за допомогою функції . [7]







Многовиди - множини точок у багатовимірному просторі (множини чисел, які "зануляють" усі рівнння системи). Ці множини наділені структурами, одна з яких, алгебрична, робить їх алгебричними многовидами. Існують й інші структури, наприклад, симплектична, яка має іншу природу, відмінну від алгебричної. Таким чином, множина може мати дві структури, а значить, бути одночасно алгебричним й симплектичним многовидом. Гіпотеза дзеркальної симетрії стверджує, що симплектична структура відповідає алгебричній, і навпаки.
Система, задана на об'єкті (система об'єкта) представляє собою множину властивостей, з кожним із яких пов'язана множина його проявів, і множину баз, з яких зв'язана множина її елементів. Формально система на об'єкті - це

де (через із додатним цілим індексом позначається множина цілих додатних чисел від 1 до значення цього індекса, ); через та позначаються відповідно властивість й множина її проявів; та - база та множина її елементів; - система об'єкта.








Коли спостереження властивості проводиться за декотрого значення параметра, то спостережувана властивість отримує певний прояв (значення) з множини Цей прояв є елементом блока розбиття Функція (канал спостереження) присвоює його певному станові змінної. Таким чином, припускається, що будь-яке спостереження дозволяє визначити, до якого блоку з належить даний прояв, навіть якщо окремий прояв не можна ідентифікувати. Відмінність блоків може бути виявлена по результатам спостережень за припущення, що помилки спостереження виключені.




Таким чином, розбиття задається функцією . Достовірно не відомо, до якого блоку належить заданий елемент . Ця недостовірність може бути задана функцією, яка зіставляє будь-які парі (елемент , блок ) число (зазвичай між 0 та 1). Таке число виражає ступінь достовірності того, що даний елемент належить даному блокові

де задає ступінь достовірності того, що належить Оскільки кожний блок однозначно помічається станом з множини (у відповідності із функцією ), функцію можна задати у вигляді





де задає ступінь достовірності того, що належить блоку з розшарування , представленому станом змінної Таким чином,


де задає функцію з у

Нехай задані функції

де - множина симетричних й рефлексивних бінарних відношень, множина структур, визначених на множині (вони також називаються відношеннями порівняння, толерантності або неорієнтованими графами із циклами), а - бінарне відношення, яке виконується для цілих та () лише тоді, коли та належать одній із підмножин , які входять до Формально,









Елементи називаються графами (які є неорієнтованими (симетричність) та містять цикли (рефлексивність)). Функції є сюр'єктивними, а за прообрази можуть складатися більш ніж з одного елемента. Тому вони індукують відношення еквівалентності на відповідних множинах лише тоді, коли та для декотрого







Для будь-якого множина й відношення підмножини (тобто операцій об'єднання й перетину множин) визначають булеву ґратку.

Близькість двох систем за поведінкою може бути виражена через метричну відстань між їх функціями поведінки. Існує багато різних типів відстаней. Наприклад, клас відстаней Мінковського визначається формулою:

де - відповідно функція поведінки заданої системи та незміщена реконструкція по гіпотезі a - параметр функцій відстані. За це - Відстань Геммінга, за - Евклідова відстань, при - верхня межа відстаней.






Для даної множини змінних, наприклад, множини , множина структур, які представляють усі реконструктивні гіпотези будь-якої узагальненої системи, визначеної на , складається з класів підмножин , які задовільняють умовам ненадлишковості та покриття. Умова покриття виглядає наступним чином

де - множина змінних з підсистем реконструктивної гіпотези, - множина змінних узагальненої системи.

Будь-яка реконструктивна гіпотеза повністю описується:
- класом підмножин змінних, які входять до неї;
- функціями поведінки, які відповідають окремим підмножинам змінних.
Кожна окрема реконструктивна гіпотеза представляє собою конкретну структуровану систему. Таким чином, структура - це властивість структурованої системи, інваріантне по відношенню до зміни функцій поведінки її елементів[8][9].
Динамічна система визначається як математична структура, яка задовільняє наступним аксіомам:
- Простір станів та множина значень часу для яких визначена поведінка системи; - топологічний простір.
- Дана множина функцій часу, визначених на і які є припустимими входами системи; - топологічний простір.
- Кожний вхід системи є деякою функцією виду ( - дійсна пряма)




- Майбутні стани системи визначаються посередництвом функції переходу станів:

- Функції та є неперервними відносно топологій, визначених на та й індукованих топологій добутку.



Для даної множини відношення на є толерантним, якщо рефлексивне й симетричне. Толерантний простір - пара . Відношення цього поняття толерантності до теорії автоматів деталізується шляхом уведення додаткової структури: припустимо, що та що - топологічний простір. Тоді рух у - функція вигляду






Рух буде -неперервним, якщо Тобто немає виявлених "стрибків у русі".[5]

Структура подій - множина об'єктів-подій, наділене структурою каузальної залежності й несумісності. Визначається як трійка , де

- - множина подій
- - частковий порядок
- антирефлексивне симетричне відношення, яке називається несумісністю (або конфліктністю), на яку накладені наступні аксіоми:



1) скінченність причин: для кожної події множина поперединків у є скінченною;



2) спадковість несумісності: для кожної події , якщо та , то . [10]




Інформація з математичної точки зору - це деякий клас відображень, або морфізмів. Множинність підходів до теорії інформації вказує на незалежність її понять від конкретного виду структур об'єктів. Єдиною математичною теорією, яка не накладає ніяких обмежень на природу об'єктів, є теорія категорій. Об'єктами категорії можуть бути множини, універсальні алгебри, топологічні простори. Якщо деякий клас систем описується математичними моделями, які припускають відображення одна в одну, то можна побудувати категорію таких моделей. Онтологічний характер об'єктів дозволяє називати їх системами. Категорний підхід відбиває цю специфіку систем: об'єкти категорії неподільні, але можуть бути представлені у вигляді множини морфізмів[11].
Теорія категорій
Категорія представляє колекцію абстрактних об'єктів, попарно пов'язаних морфізмами (стрілками). Формально, категорія складається із сукупності об'єктів й сукупності морфізмів на яких задані наступні операції[12]:



- З кожною парою об'єктів пов'язана множина - множина усіх морфізмів з y ; та якщо то
- Із кожною трійкою з пов'язане відображення : таким чином, що для якщо то
- Для кожного у виділений елемент такий, що для будь-якого будь-якого та будь-якого виконуються рівності


















Ефективність застосування теорії категорій в якості математичного апарату Model Based Systems Engeneering (MBSE) обумовлена тим, що будь-який каталог моделей представляє собою категорію. Наприклад, у твердотільному моделюванні механічних систем об'єктами категорії моделей виступають тіла - підмножини у , які є обмеженими, регулярними (співпадають із замиканням своєї внутрішності) й напіваналітичними (припускають представлення скінченними булевими комбінаціями множин вигляду де є дійсною аналітичною функцією для усіх ). Щоб задавати процедури типу "зклеювання" ділянок поверхон тіл, у категорію геометричних моделей додаються обмежені регулярні напіваналітичні підмножини у за допомогою стандартної імерсії у Далі виконується факторизація: ототожнюються один із одним усі множини, які переходять одна в одну під дією афінних ізометрій. Морфізми таких класів еквівалентності, які описують дії по складанню складових механічних систем, породжуються ізометричними вкладеннями множин й розтягненнями[13].







Тріади
З математичної точки зору тріада - трійка така, що причому де - топологічний простір, - множини, - відкритий пустий елемент, який забезпечує мінімальну зв'язність (згідно до [2]). Можна розглядати також шляхи. Тепер , де - шляхи у топологічному просторі .






Поняття абстрактної системи будуються на трійці елементів: "речі (об'єкти) - зв'язки (відношення) - властивості (атрибути)". Л. фон Берталанфі визначає систему як тріаду: "Сукупність елементів - Відношення - Середовище". Таким чином, маємо трійку:

де - множина первинних (базових) елементів (підсистем), - множина відношень (зв'язків) між ними, - множина законів та правил, які дозволяють будувати різні композиції (структури, організації) з базових елементів множин Наприклад, нехай є шість системоутворюючих чинників:




де - множина параметрів базових елементів та зв'язків між ними, - інтегративні властивості системи, - цілі функціонування системи (атрактори). Таку систему можна геометрично представити у вигляді сполучення тріад. Загальна кількість тріад, які містяться у даній системі, дорівнює числу комбінацій з 6 по 3, тобто [14][15]




Графи-експандери
Основною задачею теорії мереж, теоретичного програмування, а також екстремальної теорії графів є побудова розріджених графів, які мають велику зв'язність. Серед мір зв'язності найбільш важливою є властивість розширення: двочастковий граф із множиною вершин (тут - множина входів, - множина виходів), із ребрами ( фіксоване) називається -розширенням, якщо для кожного із потужність множини (тобто множини входів, сполучених ребрами із вершинами з ) задовільняє нерівності (тобто та - множини тих вершин з , які сполучені принаймні із однією вершиною з ). Параметр називається коефіцієнтом розширення. Задача полягає у побудові класу -розширень, з найбільшим можливим значенням Асимптотично за графи Рамануджана є оптимальними у задачі мінімізації та [16][17]














Основні властивості систем
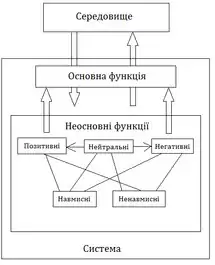
Функція системи - сукупність результатів впливів, здійснюваних даною системою на середовище, на інші системи та на саму себе. Цією характеристикою визначається роль, яку відіграє система у надсистемі, і місце, яке вона займає серед оточуючих об'єктів. Основна функція - це призначення системи. Неосновні функції - ситуативні й тимчасові, а основна функція - постійна. Зміна основної функції означає докорінну зміну системи. Негативні неосновні функції перешкоджають виконанню системою своєї основної функції, а позитивні сприяють; негативні є лише супутніми, але породжуються системою. У нейтральних функціях може приховуватися позитивний чи негативний потенціал, який може проявлятися за певних умов.
Ефективність системи - кількісна або якісна характеристика, яка дозволяє робити висновок про ступінь виконання системою притаманних їй функцій. Нехай - момент часу, коли виникла необхідність здійснення дії; - момент здійснення системою дії. Тоді час реакції системи виразиться як Наприклад, для оцінки ефективності можна встановити деякий критичний проміжок часу, , за якого реакція системи на відповідну подію, стосовно якої вона повинна реагувати, ще має сенс.



Коли основна функція виражається через її цільову спрямованість, ефективність відображає ступінь досягнення системою своїх цілей.
Цільова спрямованість визначається управлінням, тобто сукупністю узгоджених керуючих сигналів (планування), породжуючих систему у її зв'язку із середовищем, у якому вона функціонує. Автоматична регуляція (адаптація системи) полягає у здатності системи виконувати основну функцію при збуреннях, які повідомляються системі середовищем (за взаємодії функцій системи із середовищем), тобто у її стійкості. Еволюція - процес досягенння системою основної мети при заданих керуючих сигналах (або вихід на стаціонарний (квазістаціонарний) режим стійкої роботи). Динамічні реально існуючі у фізичній дійсності системи у більшості випадків знаходяться не у рівноважному стані й не у режимі граничного циклу, але здійснюють квазістаціонарні хаотичні рухи.
У випадку із самоорганізацією, наприклад, для систем штучного інтелекту, еволюція полягає навчанні, довершенні основної функції.
Зворотний зв'язок - вплив результату функціонування будь-якої системи на характер її подальшого функціонування. По характеру дії зворотні зв'язки ділять на негативні й позитивні. Негативні зворотні зв'язки прагнуть повернути систему у стійкий стан після відхиляючих впливів й складають основу так званих адаптивних механізмів функціонування систем будь-якої природи. Наявність позитивного зворотного зв'язку не усуває виникаючі у системі зміни після відхиляючих впливів, а навпаки, приводить ще до більш сильного відхилення системи від свого стійкого стану. Як позитивні, так і негативні зворотні зв'язки бувають детермінованими та випадковими, стабільними й нестабільними, зосередженими (кумулятивними) й розосередженими, запізнюваними й випереджуваними, посилюючими та послабляючими (компенсуючими), транслюючими та перетворюючими. Комбінуючись й сповнюючись конкретним змістом, зворотні зв'язки утворюють нескінченну множину механізмів, які формують цілісні властивості систем, а також визначають характер їх поведінки. Цільове регулювання зворотних зв'язків - управління поведінкою системи, наприклад, при розробці моделі кутового руху космічного апарату у інерціальному просторі. В основі такої моделі лежить уявлення про рух тіла із шістьма ступенями вільності. Зрозуміло, що для забезпечення управління потрібно додати контур управління орієнтацією апарату, вважаючи, що кути та кутові швидкості повороту космічного апарату у інерціальній системі координат вимірюються приладами, встановленими на його борту, які формують моменти сил управління на основі інформації. Відтак система параметрів "перев'язується" (перешивається) зворотними зв'язками. Наприклад, момент управління орієнтацією формується по закону:

де - вектор проекцій кутового моменту управління, - коефіцієнт зворотного зв'язку по куту відхилення, - матриця моментів інерції космічного апарату, - вектор кутів Ейлера, - вектор проекцій кутової швидкості, кососиметрична матриця з проекцій кутової швидкості, - коефіцієннт компенсації гіроскопічного моменту.


Присутність у спостережуваному довільному явищі зворотних зв'язків порушує лінійну причинно-наслідкову логіку його аналізу. У такому явищі причина стає наслідком та, навпаки, наслідок стає причиною. Ситуація причинно-наслідкової інверсії свідчить про існування у досліджуваному об'єкті самоорганізації[18]. Прикладом самоорганізації є ройовий інтелект. Факторкатегорія роботів , інтеракція яких забезпечує рішення обмеженої множини задач , є колективом. При цьому вважають, що усі роботи однакові, тобто рій - гомогенний колектив.



При однорідності елементів оптимальною по інформативності є сотова структура. Централістичні структури нерівномірні у сенсі розподілу інформаційного навантаження (усе проходить через центр). У повнозв'язних й мережевих структурах зі збільшенням навантаження відбувається катастрофічний ріст кількості інформації, яка ретранслюється. Інформативність лінійних й скелетних структур є мінімальною[19]. Якщо лінійна динамічна система, описувана системою диференціальних рівнянь першого порядку із сталими коефіцієнтами, достатньо велика (складається з 10 або більше змінних) та її зв'язність менше 13% (критична зв'язність), то можна сказати, що така система майже стійка. Якщо її зв'язність більша 13%, вона майже нестійка[20][21][22][23]. У той же час у добре організованій системі взаємодії структурних елементів взаємоузгоджені, цілеспрямовані та синхронізовані на досягнення спільної мети. Чим вища взаємоузгодженість дій елементів у системі, тим вища її організованість і тим більше перевищує потенціал системи суму (суперпозицію) потенціалів усіх складових елементів (підсистем)[24]. Це називається емерджентністю. Системний підхід до пізнання погягає у взаємовіднесеності усіх смислових елементів та в інтерпретації їх взаємно обґрунтованої значущості (інтенціонально[25]) всередині певної системи, що є результатом реляціонування[26][27]. Тобто емерджентність є результатом реляціонування. Протилежністю реляційності є субстрат (субстанціалізм). Іншими словами, інформація не існує без матерії, без носія[28]. Вона існує лише для спостерігача, який отримує її через процеси взаємодії матерії[29][30]. Поняття інформації можна відкинути й розглядати лише матеріальні процеси та явища.
Система обчислень
Каркасом є трійка де - деяка скінченна множина, - сигнатура (перелік імен та їх арностей) та - аксіоматика, яка складається із скінченного числа аксіом. Станом каркасу називається модель у якій набір відношень найменований у сигнатурі таким чином, що виконується аксіоматика Два стани каркасу та називаються тотожними, якщо тотожне відображення породжує ізоморфізм відповідних моделей[31].







Нехай - скінченна множина символів, яка називається сигнатурою сортів. Символи називаються іменами сортів або сортами. Стандартні сорти мають наступні назви:


- Variable - клас змінних
- Bool - клас логічних значень
- Nat - клас напкільця натуральних чисел
- Int - клас кільця цілих чисел
- Real - класи поля дійсних чисел.
Нехай - скінченний клас множин, індексованих іменами сортів, які називаються носіями відповідних сортів.

- - множина змінних
- - множина
- - множина натуральних чисел
- - множина цілих чисел
- - множина дійсних чисел






Багатосортною операцією над називається відображення де - сорти аргументів операції відповідно, а - арність Сигнатура операцій - скінченна множина символів операцій разом із відображенням, яке кожному символові ставить у відповідність багатосортну операцію разом із її типом. Багатосортною операцією є, наприклад, операція множення у векторному просторі. Якщо - ім'я векторного простору над полем дійсних чисел, то операція множення задається специфікацією Багатосортним предикатом є відображення де Послідовність визначає тип предикату, а - його арність.














Багатосортною алгебричною системою є четвірка де - множина сортів із іменами з - сигнатура сортних операцій, - сигнатура багатосортних предикатів.




Сорт залежить від сорта якщо одна з операцій має тип Підмножина елементів які мають тип позначається a клас областей значень сортів - Обмеженням алгебри на сорт є багатосортна алгебрична система Таким чином, багатосортна алгебрична система може бути представлена набором обмежень (алгебр тобто ).












Аксіомою алгебри називається рівність або умова рівності у сигнатурі Аксіоматичний опис алгебри - скінчена система аксіом алгебри Алгебри із аксіомами типу рівностей називають многовидами.



Конструктивний опис алгебри полягає у визначенні конструктора сорту та специфікацій інтерпретаторів операцій Конструктор сорта - система рівностей, яка визначає синтаксично елементи сорту у вигляді термів виду у сигнатурі конструкторів яка у свою чергу представляє з себе множину символів конструкторів разом із відображенням, яке кожному символу ставить у відповідність символ сорту разом із списком символів сортів його аргументів.




Інтерпретатором операції сигнатури є функція, яка реалізує алгоритм виконання цієї операції. Таким чином, для аксіоматичного й конструктивного опису алгебри у її визначення включаються скінченна множина аксіом та скінченна множина інтерпретаторів Багатосортна алгебра записується як[32]



Оптимізація
За керування керуючі сигнали виробляються раніше, ніж розвивається керований процес. На відміну від регулювання, яке має на увазі реакцію системи на зміни регульованого процесу з метою його спрямування.
Сукупність декількох керованих об'єктів, сполучених єдністю мети, називається керованою системою. Сукупність засобів, які прагнуть забезпечити виконання керованою системою певної мети, називається керуючою системою. Керована й керуюча системи, взаємодіючи між собою, утворюють систему керування.
Поведінка системи керування визначається: метою керування, зовнішніми та внутрішніми умовами (тобто властивостями керованої й керуючої систем). Система керування є автоматичною, якщо основні функції керування, необхідні у процесі роботи системи для досягнення мети керування, здійснюються у ній без безпосередньої участі людини.
Рішення проблеми керування полягає у віднаходженні вектору керування, за якого виконується умова

та одночасно задовільняючий обмеженням та зв'язкам, які накладаються внутрішніми властивостями системи. Чинник оптимальності, або цільова функція характеризує важливі властивості планованого (проектованого) об'єкта, а також дозволяє визначити відносні пріорітети можливих рішень. Чинник оптимальності є складовою системного підходу до планування, у відповідності із яким модель об'єкта планування характеризується множиною можливих структур векторами вхідних впливів та вихідними параметрами



Структурою може бути, наприклад, схемно-конструкторське рішення. Вихідними параметрами, тобто проекціями вектора , є показники функціонування, габаритні розміри, об'єм, маса, надійність (підпорядковані вимогам стандартів й іншої нормативної документації). Під вхідним впливом розуміється вплив, прикладений до входу системи керування або окремо розглядуваного її елемента (підсистеми).

У загальному випадку вихідні параметри залежать від структури та вхідних впливів


За деякими даними, 75% усіх розрахункових математичних задач припадає на рішення лінійних алгебричних рівнянь[33].
Якщо числа представляються чисельно (тобто посередництвом p-розрядного дробу), то кроки реалізуються лише наближено, із деякою помилку. Теоретичне (або точне) значення величини позначимо Літери із рискою згори позначають значення, які містять помилку, тобто числа, з якими проводяться обчислення. У відповідності із цим позначає істинну помилку, та - відповідно її нижню та верхню межі, - максимальну помилку та - відносну істинну помилку Відтак,








Існують три джерела помилок:
- помилка вхідних даних
- помилка методу (обрив)
- помилка округлення (машинна помилка)
Дослідження похибки виходу є складною проблемою. Якщо розглядати обчислювальний крок валу у якому вхідна величина повинна бути обчислена згідно до правила по то істинна помилка розкладається на три складові:




Помилка методу:

Вона є помилкою відхилення обчислювальної моделі й може з'являтися навіть тоді, коли початкові дані є точними (наприклад, цілі числа).
Помилка, обумовлена входом:

Ця помилка є оцінкою розповсюдження помилки уведення за обчислення (див. Ефект метелика (математика)).
Випадкова помилка:

Вона є мірою помилок, приєднаних від машинної реалізації дій.
Помилку, обумовлену вхідними даними, можна помітити й оцінити, якщо алгоритм є простим й задовільняє декотрим додатковим умовам. Для складних задач простій безпосередні методи дослідження розповсюдження помилки перестають діяти. У 2015 році був прийнятий стандарт комп'ютерної реалізації інтервальної арифметики IEEE 1788-2015. [34]
Величина додаткової помилки залежить перш за все від функціонування обчислювальної техніки. Головні причини випадкових помилок
- метод обривання й округлення, прийнятий у машині;
- втрата значущих розрядів при відніманні.
Основні напрямки:
- статистичні дослідження накопичення помилок;
- детерміністичний аналіз розповсюдження помилки (методи Вілконсона);
- арифметика інтервалів.
Обчислювальний метод є стійким, якщо за усіх обставин відхилення помилок входу та виходу нижче деякої фіксованої межі.
Контролепридатність систем
Нехай - впорядкований граф із вершинами, який представляє модель об'єкта діагностування неперервної дії. Через позначається множина входів графу , а через - множина виходів.



Вершини у графі утворюють контрольну пару якщо відповідний сигнал, який подається на вхід елемента може бути знятий на виході елемента При цьому вершина графу називається контрольною точкою. Щоб пара була контрольною, необхідна сполучність вершини графу з вершини Множина контрольних точок для якої








Вектором перевірки контрольної пари є -вимірний вектор компонента якого дорівнює 1, якщо існує хоча б один шлях від до який містить вершину у протилежному випадку




Матрицею перевірок на множині контрольних точок називається матриця, у якій[35]:


У програмуванні у випадку помилки застосовують передбачені розробниками в умовах повідомлення, які сигналізують про проблему:
if (/*умова, яка перевіряється*/) {
/*код*/;
} else {
/*повідомлення про помилку*/;
}
За відповідними несправностями можуть закріплюватися коди помилок.
Системотехніка як напрям у кібернетиці
Системотехніка – напрям у кібернетиці, що вивчає питання планування, проектування, створення, випробовування та експлуатації складних інформаційних систем, основу яких становлять обчислювальні машини. Термін С. виник у 60-х рр. ХХ ст. у зв’язку з розвитком автоматизованих систем керування (управління) підприємством і галузями господарства. С. застосовують в автоматизації проектування, автоматизації складних науково-експериментальних робіт, автоматизації управління виробничими галузями промисловості й економічними процесами, автоматизації адміністративної праці тощо. Головним фундаментальним принципом С. є принцип максимуму ефективності. С. має справу з великими системами, в яких, крім матеріальних, технічних та енергетичних факторів, значне місце посідає інформаційний фактор, питома вага якого зростає зі зростанням масштабів системи. Через це, проектуючи систему, основну увагу приділяють інформаційному аспектові, і він стає визначальним щодо інших.
Див. також
Примітки
- Гуд Г.-Х., Макол Р.-Э. Системотехника. Введение в проектирование больших систем, пер. с англ. — М., 1962.
- 7. Тіхонов В.І. – Геометризація тензорної моделі цифрових потоків у відкритій мережі.
- В.Г.Боялтинский - Математические методы оптимального управления.
- И.П.Норенков - Автоматизированное проектирование, М., 2000.
- Дж.В.Корнакио - Топологическая структура общесистемных математических моделей.
- Е. С. Волкова, В. Б. Гисин - Нечеткие классы толерантности.
- Э.Маделунг - Математический аппарат физики, с. 392.
- А.И.Мальцев - Алгебраические системы.
- George J.Klir - Architecture of systems problem solving.
- Glynn Winskel - Event structures.
- А.Шаров - Понятие информации в теории категорий.
- Ю.Л.Ершов - Теория нумераций.
- С. П. Ковалёв, Методы теории категорий в модельно-ориентированной системной инженерии, Информ. и её примен., 2017, том 11, выпуск 3, 42–50. DOI: https://doi.org/10.14357/19922264170305.
- М.Б.Гузаиров, Б.Г.Ильясов, И.Б.Герасимова - Системный подход к анализу сложных систем и процессов на основе триад.
- С.А. Кудж, В.Я. Цветков - Тринитарные системы.
- Peter Sarnak - Some applications of modular forms.
- Экспандеры: конструкции и приложения.
- Новосельцев В.И., Тарасов Б.В., Голиков В.К., Демин Б.Е. - Теоретические основы системного анализа.
- Дружинин В.В, Конторов Д.С. Введение в теорию конфликта. М.: Радио и связь, 1989.
- В.В. Круглов, А.А. Усков - Устойчивость больших систем.
- Р. Бойелл - Память с семантическими связями ("Проблемы бионики" под ред. Левиной А.Б., 1965, с.239).
- А.И.Яблонский - Структура и динамика современной науки (Системные исследования. Ежегодник. 1976 г., изд. "Наука", с.71).
- В.Н.Костюк - Теория систем как теория отношений.
- И.В.Прангишвили - Системный подход и системные закономерности, с. 46-47.
- Ю. С. Легович, Д. Ю. Максимов, Выбор исполнителя в группе интеллектуальных агентов, УБС, 2015, выпуск 56, 78–94.
- А. Г. Жилкин - Базовые категории и принципы реляционной физики.
- Будко В.В. - О пространственно-временной онтологии теоретической физики.
- Хургин Владимир Михайлович - Об определении понятия «информация».
- С.Н. Даровских, Н.В. Вдовина, Н.С. Никитин — Проблемы экспликации понятия «информация» и обоснование предложений по их преодолению.
- Н.Н.Брушлинская, А.Т.Фоменко - Тензорный анализ.
- Ю.А.Шрейдер - К построению языка описания систем.
- М.С.Львов - Об одном подходе к верификации алгебраических вычислений.
- Бронников А.М. Вложение систем. Условие строгой нечувствительности линейных систем к параметрическим возмущениям // Автоматика и телемеханика. 2004. №4. С.35-47.
- 1788-2015 - IEEE Standard for Interval Arithmetic.
- В.И.Сагунов, Л.С.Ломакина - Контролепригодность структурно связанных систем.
Література
- Systems Engineering Fundamentals. Defense Acquisition University Press, 2001
- Systems Engineering Handbook NASA/SP-2007-6105 Rev1, December 2007.
- Derek Hitchins, World Class Systems Engineering, 1997.